一种居家机器人
本发明涉及机器人,尤其涉及一种居家机器人。
背景技术:
1、人口老龄化是世界各国面临的一大难题,中国60岁以上老年人口占总人口的比例已达16%,按照国际通行标准,中国已然跨入了老龄化社会的门槛。而最近发布的《中国老龄事业的发展》白皮书,表明中国官方也已意识到人口老龄化问题的紧迫性。人口的快速老龄化,养老院紧张,老年人需要陪伴,可以预计,服务机器人将大量进入家庭,迎来服务机器人家庭化的浪潮。
2、cn113967919b一种居家陪护机器人,属于家用智能机器人的领域,其包括机动体和监控机构,所述机动体上设有行动组件,所述行动组件包括机动轮,所述机动轮位于机动体朝向地面的一侧且与机动体转动连接,所述机动体背离机动轮的一侧设置有连接机构,所述连接机构用于将监控机构与机动体连接,所述监控机构包括相互电连接的信号发生器和第一摄像头。
3、然而上述现有技术以监控型为主,观察服务对象的状态,其功能性较为单一,无法满足老人的日常需求。
技术实现思路
1、有鉴于此,有必要提供一种居家机器人,用以解决现有技术中以监控型为主,观察服务对象的状态,其功能性较为单一,无法满足老人的日常需求的技术问题。
2、本发明提供一种居家机器人,该居家机器人包括:
3、座体;
4、座椅组件,包括椅座、椅背、椅腿、两个连杆和第一驱动机构,所述椅座置于所述座体上侧,所述椅背的一端与所述椅座的一端转动连接,所述椅腿的一端与所述椅座的另一端转动连接,所述椅腿靠近所述椅座的一端的两侧向上凸设形成有连接部,两个所述连杆分设于所述座椅的两侧,每一所述连杆的两端分别与所述椅背的中部和所述连接部转动连接,所述第一驱动机构与所述椅背连接,用于驱动所述椅背活动;
5、行走机构,设于所述座体,所述行走机构用于带动所述座体活动。
6、在一些实施例中,所述第一驱动机构包括连接件、平移组件和第一伸缩组件,所述连接件沿前后向滑动安装于所述座体,所述平移组件与所述连接件连接用于驱动所述连接件滑动,所述第一伸缩组件的两端分别与所述连接件和所述椅背的中部转动连接。
7、在一些实施例中,所述居家机器人还包括两个桌布组件,两个所述桌布组件与两个所述连杆一一对应,所述桌布组件包括桌布和第二驱动机构,所述桌布的上端沿前后向上的轴线转动安装于所述连杆的下侧,所述第二驱动机构设于所述连杆,所述第二驱动机构与桌布连接,用于驱动所述桌布转动。
8、在一些实施例中,所述座体还设有侧面开口设置的容纳腔;
9、所述居家机器人还包括置物板和第三驱动机构,所述置物板活动安装于所述容纳腔内,以具有伸出至所述容纳腔的取用状态以及退回至所述容纳腔内的收起状态,所述置物板用于放置物品,所述第三驱动机构与所述置物板连接,用于驱动所述置物板在所述取用状态和所述收起状态之间切换。
10、在一些实施例中,所述第三驱动机构包括第二伸缩组件、竖直移动组件和转动组件,所述第二伸缩组件的一端沿竖直方向滑动且沿前后向轴线转动安装于所述容纳腔内,所述第二伸缩组件的另一端与所述置物板转动连接,所述竖直移动组件设于所述容纳腔内,且与所述第二伸缩组件连接,用于驱动所述第二伸缩组件竖直滑动,所述转动组件设于竖直移动组件,且与所述第二伸缩组件连接,用于驱动所述第二伸缩组件沿前后向轴线转动。
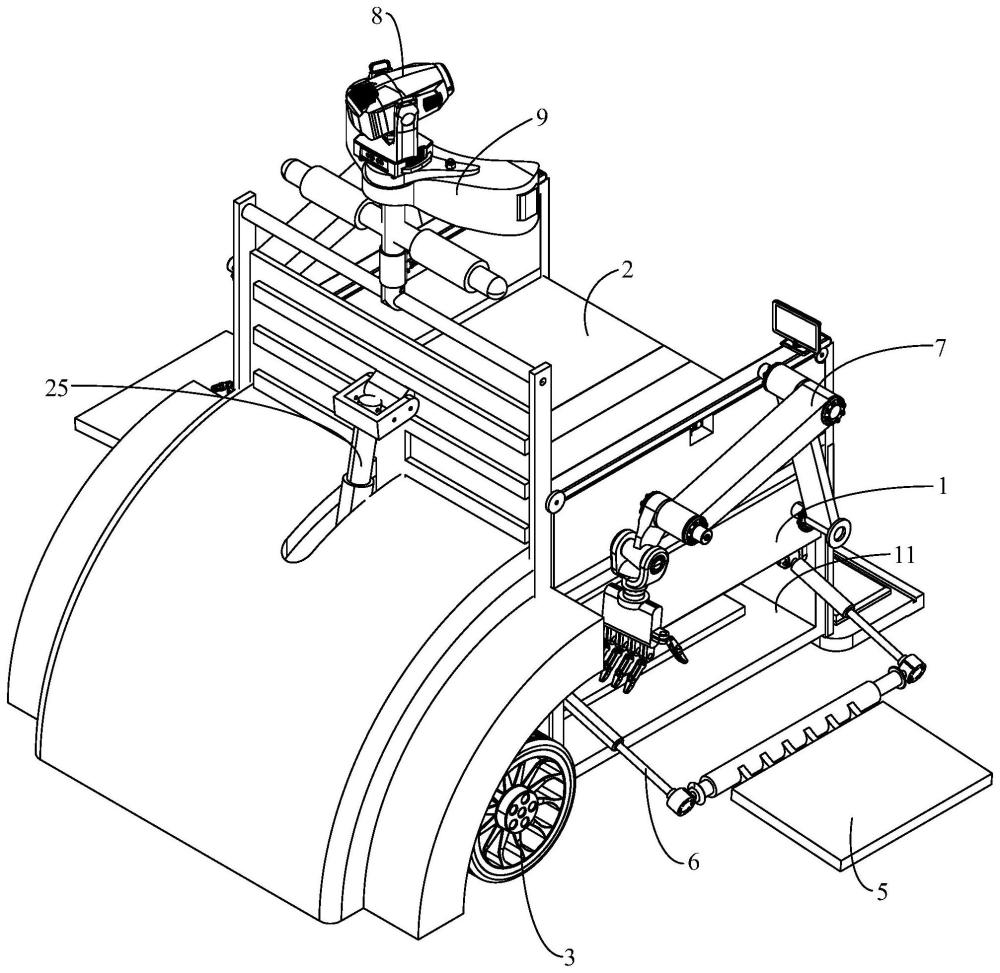
11、在一些实施例中,所述居家机器人还包括机械臂,所述机械臂设于所述座体的旁侧,所述机械臂用于抓取物品。
12、在一些实施例中,所述居家机器人还包括视觉识别系统,所述视觉识别系统设于所述椅背的上侧,所述视觉识别系统与所述机械臂电连接。
13、在一些实施例中,所述居家机器人还包括头枕,所述头枕竖直活动安装于所述椅背的上端,且所述视觉识别系统设于所述头枕的上端。
14、在一些实施例中,所述视觉识别系统包括安装支架以及摄像头,所述安装支架沿竖直方向上的轴线转动安装于所述头枕的上端,所述摄像头沿水平方向上的轴线转动安装于所述安装支架。
15、在一些实施例中,所述座体前侧底部还设有踏板;
16、所述行走机构包括两个万向轮、两个驱动轮以及第四驱动机构,两个所述万向轮间隔布设于所述踏板的底部,两个所述驱动轮转动安装于所述座体的底部,所述第四驱动机构与所述驱动轮连接,用于驱动两个所述驱动轮转动。
17、与现有技术相比,本发明提供的居家机器人,所述椅座置于所述座体上侧,所述椅背的一端与所述椅座的一端转动连接,所述椅腿的一端与所述椅座的另一端转动连接,所述椅腿靠近所述椅座的一端的两侧向上凸设形成有连接部,两个所述连杆分设于所述座椅的两侧,每一所述连杆的两端分别与所述椅背的中部和所述连接部转动连接,所述第一驱动机构与所述椅背连接,所述行走机构设于所述座体,具体使用时,当需要供老人坐着时,所述第一驱动机构驱动所述椅背向上转动,所述椅背通过所述连杆带动所述椅腿向下转动,使得所述椅座与所述椅背,所述椅背与所述椅腿之间相互垂直设置,此时整个装置形成一个轮椅结构,可供老人使用,当老人需要从轮椅结构上站立时,所述第一驱动机构继续驱动所述椅背转动,由于此时所述椅腿位于所述座体的前侧,通过所述座体对所述椅腿的限位,使得所述椅腿无法继续向下转动,所以使得在所述第一驱动机构驱动所述椅背转动时,由于所述连杆的存在,从而带动所述椅背以及椅座转动,此时所述椅背和所述椅座相对固定,所述椅座绕着与所述椅腿的连接处向上转动,使得所述椅座自前之后逐渐向上倾斜设置,如此即可辅助老人站立,当需要用于装置放置物品时,所述第一驱动机构驱动所述椅背向下转动,通过所述连杆,所述椅背带动所述椅腿向上转动,当转动至所述椅座、所述椅背和所述椅腿处于同一平面时,所述椅座、所述椅背、所述椅腿可形成一个平台,构成一个折叠桌,可供老人使用,本申请通过所述椅座、所述椅背和所述椅腿相互活动设置,使得装置具有轮椅形态、辅助站立形态以及折叠桌形态,三种变化形态能够满足不同使用的需要,功能多样化。
18、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以本发明的较佳实施例并配合附图详细说明如下。本发明的具体实施方式由以下实施例及其附图详细给出。
技术特征:
1.一种居家机器人,其特征在于,其包括:
2.根据权利要求1所述的居家机器人,其特征在于,所述第一驱动机构包括连接件、平移组件和第一伸缩组件,所述连接件沿前后向滑动安装于所述座体,所述平移组件与所述连接件连接用于驱动所述连接件滑动,所述第一伸缩组件的两端分别与所述连接件和所述椅背的中部转动连接。
3.根据权利要求1所述的居家机器人,其特征在于,所述居家机器人还包括两个桌布组件,两个所述桌布组件与两个所述连杆一一对应,所述桌布组件包括桌布和第二驱动机构,所述桌布的上端沿前后向上的轴线转动安装于所述连杆的下侧,所述第二驱动机构设于所述连杆,所述第二驱动机构与桌布连接,用于驱动所述桌布转动。
4.根据权利要求1所述的居家机器人,其特征在于,所述座体还设有侧面开口设置的容纳腔;
5.根据权利要求4所述的居家机器人,其特征在于,所述第三驱动机构包括第二伸缩组件、竖直移动组件和转动组件,所述第二伸缩组件的一端沿竖直方向滑动且沿前后向轴线转动安装于所述容纳腔内,所述第二伸缩组件的另一端与所述置物板转动连接,所述竖直移动组件设于所述容纳腔内,且与所述第二伸缩组件连接,用于驱动所述第二伸缩组件竖直滑动,所述转动组件设于竖直移动组件,且与所述第二伸缩组件连接,用于驱动所述第二伸缩组件沿前后向轴线转动。
6.根据权利要求1所述的居家机器人,其特征在于,所述居家机器人还包括机械臂,所述机械臂设于所述座体的旁侧,所述机械臂用于抓取物品。
7.根据权利要求6所述的居家机器人,其特征在于,所述居家机器人还包括视觉识别系统,所述视觉识别系统设于所述椅背的上侧,所述视觉识别系统与所述机械臂电连接。
8.根据权利要求7所述的居家机器人,其特征在于,所述居家机器人还包括头枕,所述头枕竖直活动安装于所述椅背的上端,且所述视觉识别系统设于所述头枕的上端。
9.根据权利要求8所述的居家机器人,其特征在于,所述视觉识别系统包括安装支架以及摄像头,所述安装支架沿竖直方向上的轴线转动安装于所述头枕的上端,所述摄像头沿水平方向上的轴线转动安装于所述安装支架。
10.根据权利要求1所述的居家机器人,其特征在于,所述座体前侧底部还设有踏板;
技术总结
本发明涉及一种居家机器人,包括座体、座椅组件和行走机构;所述座椅组件包括椅座、椅背、椅腿、两个连杆和第一驱动机构,所述椅座置于所述座体上侧,所述椅背的一端与所述椅座的一端转动连接,所述椅腿的一端与所述椅座的另一端转动连接,所述椅腿靠近所述椅座的一端的两侧向上凸设形成有连接部,两个所述连杆分设于所述座椅的两侧,每一所述连杆的两端分别与所述椅背的中部和所述连接部转动连接,所述第一驱动机构与所述椅背连接,用于驱动所述椅背活动;所述行走机构设于所述座体,所述行走机构用于带动所述座体活动。本发明具有轮椅形态、辅助站立形态以及折叠桌形态,三种变化形态能够满足不同使用的需要,功能多样化。
技术研发人员:李益兵,蒋嘉欣,张凯,寇彦林
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!