一种手术机器人精度测量工装及精度测量方法与流程
本发明涉及医疗器械检验测量,特别涉及一种手术机器人精度测量工装及精度测量方法。
背景技术:
1、目前,骨科手术机器人系统精度检测项目中,大都使用若干在x光显影的小钢球代替手术规划目标点进行检测,钢球通常两两一组,组成一条目标通道。在检测时通过影像设备获取钢球的三维空间或二维图像坐标,将坐标输入执行软件中,计算得到机器人末端的定位位置,再由软件驱动机器人到达定位位置,通过测量机器人实际到达的位姿与钢球目标通道位姿之间的误差来描述机器人系统误差。
2、现有工装及测量方法中,存在如下问题待解决:
3、1、骨科手术机器人系统精度检测项目中,现有工装无法模拟x光成像设备进行成像,检测时需要拍摄x光图像,限制了检测场景,且对检测人员具有一定的辐射。
4、2、现有工装针对光学导航原理的机器人进行检测,无法用于直观定位导航原理的手术机器人。
5、因此,亟需对现有手术机器人精度测量工装及测量方法进行改进。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,本发明提供了一种手术机器人精度测量工装及精度测量方法,使用相机等效替代x光成像设备,可以实现图像导航同时也避免了x光辐射,通过目标调整组件调整相机中心与目标指示块中心始终保持在一条直线上,完成对手术机器人的距离误差和角度误差的检测。
2、本发明的一个方面,提供了一种手术机器人精度测量工装,包括:
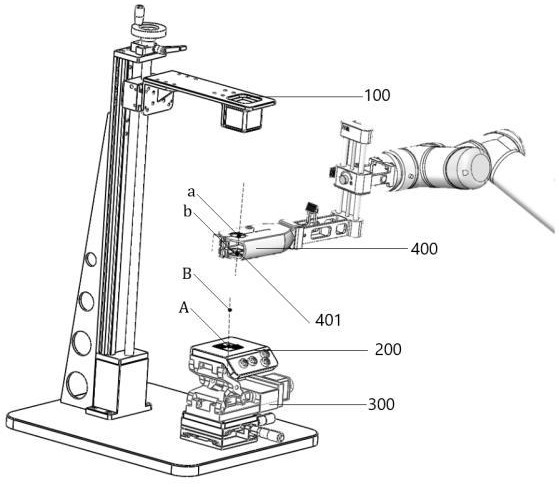
3、成像组件、目标指示组件、目标位置调整组件和三坐标测量装置;
4、所述成像组件包括相机和高度调节装置;
5、所述目标指示组件包括目标指示块、标定标记和标定标记固定座,所述目标指示块和所述标定标记设置在所述标定标记固定座上;
6、所述目标位置调整组件包括三维调整平台,所述标定标记固定座设置在所述三维调整平台上,所述三维调整平台用于调整所述目标指示块的中心位置和高度;
7、所述三坐标测量装置,用于检测所述标定标记以获取所述三维调整平台位于第一高度位置时所述目标指示块的第一中心位置,并获取所述三维调整平台位于第二高度位置时所述目标指示块的第二中心位置;以及检测手术机器人导向定位器的导航通道同时瞄准所述相机中心和所述第二中心位置时的上平面孔坐标位置和下平面孔坐标位置。
8、进一步的,
9、所述高度调节装置包括滚珠丝杠、丝杠螺母、第一调节手轮和悬臂;
10、所述滚珠丝杠垂直设置于底座上,其包括螺纹杆和滑杆;所述丝杠螺母与所述螺纹杆螺纹连接,并与滑杆滑动连接;所述第一调节手轮用于带动所述螺纹杆转动,进而驱动所述丝杠螺母上下移动;所述悬臂固定在所述丝杠螺母上,悬臂的一端设置有所述相机。
11、进一步的,所述三维调整平台包括:二自由度平移调整平台和高度调整平台,所述高度调整平台固定在所述二自由度平移调整平台上,所述标定标记固定座固定在所述高度调整平台上。
12、进一步的,所述高度调整平台包括:x形高度调节支架、伸缩调节件和第二调节手轮;所述x形高度调节支架的一个底部支脚连接在所述伸缩调节件上,所述第二调节手轮用于驱动所述伸缩调节件进行伸缩运动,进而带动x形高度调节支架的两个底部支脚接近或远离,从而实现高度调节。
13、进一步的,所述目标指示块为田字形方块,对角方块分别设置为黑色和白色。
14、进一步的,所述标定标记为4个呈y字形分布的圆柱状凹面。
15、本发明的另一个方面,提供了一种基于所述手术机器人精度测量工装的手术机器人精度测量方法,包括如下步骤:
16、将所述三维调整平台调整至第一高度位置,并将所述目标指示块的中心对准相机画面的中心;用所述三坐标测量装置检测每个标定标记的当前坐标位置,并根据全部标定标记的当前坐标位置计算得到所述目标指示块的第一中心位置;
17、将所述三维调整平台调整至第二高度位置,并将所述目标指示块的中心对准相机画面的中心;用所述三坐标测量装置检测每个标定标记的当前坐标位置,并根据全部标定标记的当前坐标位置计算得到所述目标指示块的第二中心位置;
18、在所述相机图像的导航下,将手术机器人导向定位器的导航通道同时对准所述第二中心位置和相机画面的中心;用所述三坐标测量装置检测所述导向定位器的上平面孔坐标位置和下平面孔坐标位置;
19、将所述第一中心位置和所述第二中心位置的连线作为手术机器人的虚拟定位通道,将所述上平面孔坐标位置和下平面孔坐标位置的连线作为手术机器人的实际定位通道,计算所述虚拟定位通道和所述实际定位通道的距离误差和角度误差。
20、进一步的,根据下式计算所述虚拟定位通道和所述实际定位通道的距离误差和:
21、;
22、;
23、;
24、;
25、其中,表示目标指示块的第一中心位置距离实际定位通道的距离误差;表示目标指示块的第二中心位置距离实际定位通道的距离误差;,,是导向定位器的上平面孔的三维坐标值;,,是导向定位器的下平面孔的三维坐标值;,,是目标指示块的第一中心位置的三维坐标值;,,是目标指示块的第二中心位置的三维坐标值;,为中间量。
26、进一步的,根据下式计算所述虚拟定位通道和所述实际定位通道的角度误差:
27、;
28、;
29、;
30、其中,表示第一中心位置a点到第二中心位置b点的向量,表示导向定位器的上平面孔坐标位置到下平面孔坐标位置的向量;表示导向定位器的上平面孔坐标位置,表示导向定位器的下平面孔坐标位置;,,是导向定位器的上平面孔的三维坐标值;,,是导向定位器的下平面孔的三维坐标值;,,是目标指示块的第一中心位置的三维坐标值;,,是目标指示块的第二中心位置的三维坐标值。
31、进一步的,所述标定标记为4个呈y字形分布的圆柱状凹面;
32、根据下式计算目标指示块的中心位置:
33、 ;
34、 ;
35、 ;
36、其中,表示目标指示块的中心位置坐标矩阵;,,表示目标指示块的中心位置三维坐标值;,,为第一标定标记的三维坐标值;,,为第二标定标记的三维坐标值;,,为第三标定标记的三维坐标值;,,为第四标定标记的三维坐标值;为目标指示块的中心与第一标定标记的距离;为目标指示块的中心与第二标定标记的距离;为目标指示块的中心与第三标定标记的距离;为目标指示块的中心与第四标定标记的距离;和为中间量矩阵。
37、本发明提供的一种手术机器人精度测量工装及精度测量方法,使用相机等效替代x光成像设备,转动第一调节手轮即可调节相机上下移动,以模拟x光成像设备在不同的高度进行成像,避免了检测过程中产生辐射对检测人员产生身体影响;通过目标调整组件对目标指示块中心进行调整,使相机成像中心与目标指示块中心时刻保持在同一直线上,实现对手术机器人精度的距离误差和角度误差的检测。解决了现有工装无法实现基于直观图像导航的手术机器人精度检测的问题,操作简便,有效提高检测效率。
- 还没有人留言评论。精彩留言会获得点赞!