一种吊轨式巡检机器人行走机构的制作方法
本发明涉及到吊轨式巡检机器人领域,特别涉及到一种吊轨式巡检机器人行走机构。
背景技术:
1、随着智能变电站和无人值守变电站的大力推广应用,设备的自动化智能化巡检对保证设备的正常运行至关重要。现有的基于工型梁轨道的挂轨巡检机器人系统已经应用较广,但仍存在机构复杂、传动效率较低、转弯性能欠佳等技术问题亟待解决。
2、如公开号为cn111571564a的中国专利申请文件公开了一种用于巡检的挂轨机器人,其采用模块化设计,机构紧凑,便于安装和维修,但驱动系统采用皮带驱动,传动系统较为复杂,占用空间较大;转向系统为固定连接,回正系统不完善,容易出现回正不灵活、转弯不稳定的问题。
3、为实现轨道机器人机构的紧凑化、轻量化、智能化、高效化,现有技术迫切需要一种新型的吊轨式巡检机器人行走传动机构。
技术实现思路
1、本发明要解决的技术问题是:解决上述存在的技术问题,提供一种结构紧凑、回正灵活、避免打滑、控制精准的吊轨式巡检机器人行走机构。
2、本发明解决其技术问题所采用的技术方案是:
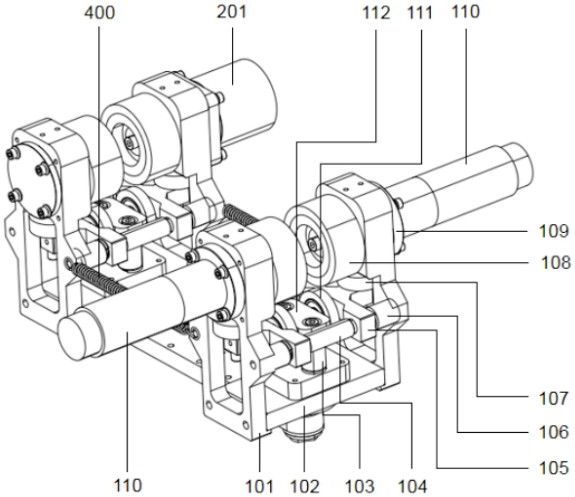
3、一种吊轨式巡检机器人行走机构,行走机构挂设在工字型轨道上,包括驱动轮组件、铰接座组件、从动轮组件,驱动轮组件和从动轮组件沿铰接座组件的长度方向间隔布置并通过铰接座组件活动连接,驱动轮组件包括两组通过底部连接板连接的电机支座以及设于电机支座上的回正支架、回正弹簧、回正轮和驱动轮;驱动轮设置在电机支座顶部,回正弹簧设置在电机支座中部,回正弹簧与回正支架连接,回正轮通过回正支架与电机支座弹性连接。
4、优选的,两组驱动轮相对设置在电机支座顶部的内侧,电机支座顶部的外侧设有电机支架,驱动电机安装在电机支架内并与驱动轮平键连接。
5、优选的,回正弹簧设置在电机支座的中部向内的方向上,回正弹簧与回正支架连接,回正支架可沿支撑杆轴向移动,通过调整两个回正轮间距以实现对工字型轨道的自适应抱紧。
6、优选的,底部连接板的上方还设有张紧弹簧,张紧弹簧的另一端连接有张紧轮支架,张紧轮设置在张紧轮支架的两侧,并通过张紧轮支架与底部连接板弹性连接。
7、优选的,张紧轮和张紧轮支架可上下移动,通过调整张紧轮的高度以实现对工字型轨道的自适应抱紧。
8、优选的,从动轮组件包括两组通过底部连接板连接的从动轮支座以及设于从动轮支座上的回正支架、回正弹簧、回正轮和从动轮;从动轮设置在从动轮支座顶部,回正弹簧设置在从动轮支座的中部,回正弹簧与回正支架连接,回正轮通过回正支架与从动轮支座弹性连接。
9、优选的,两组从动轮相对设置在从动轮支座顶部的内侧,从动轮支座顶部的外侧设有编码器支架,编码器安装在编码器支架上并与从动轮平键连接。
10、优选的,驱动轮组件与从动轮组件之间通过回正拉簧连接。
11、本发明的有益效果是:
12、(1)通过设置双减速电机直驱的驱动方式,取代了带传动的驱动,简化了驱动结构,解决了现有驱动方式结构复杂的问题。
13、(2)通过设置回正支架、回正轮、回正弹簧等组成的回正机构,实现了自动回正的功能,解决了现有技术回正不畅顺的问题。
14、(3)通过设置张紧轮、张紧弹簧等组成的张紧机构,实现了对轨道的自适应抱紧,避免了打滑问题的发生。
15、(4)将整体结构设置的较为紧凑,缩小了机器人体积,扩大了使用场景,解决了现有机器人尺寸较大、不够紧凑的问题。
技术特征:
1.一种吊轨式巡检机器人行走机构,行走机构挂设在工字型轨道上,包括驱动轮组件、铰接座组件、从动轮组件,驱动轮组件和从动轮组件沿铰接座组件的长度方向间隔布置并通过铰接座组件活动连接,其特征在于,驱动轮组件包括两组通过底部连接板连接的电机支座以及设于电机支座上的回正支架、回正弹簧、回正轮和驱动轮;驱动轮设置在电机支座顶部,回正弹簧设置在电机支座中部,回正弹簧与回正支架连接,回正轮通过回正支架与电机支座弹性连接。
2.根据权利要求1所述的吊轨式巡检机器人行走机构,其特征在于,两组驱动轮相对设置在电机支座顶部的内侧,电机支座顶部的外侧设有电机支架,驱动电机安装在电机支架内并与驱动轮平键连接。
3.根据权利要求1所述的吊轨式巡检机器人行走机构,其特征在于,所述回正弹簧设置在电机支座的中部向内的方向上,回正弹簧与回正支架连接,两个回正支架之间通过支撑连杆连接,回正支架可沿支撑连杆轴向移动,通过调整两个回正轮间距以实现对工字型轨道的自适应抱紧。
4.根据权利要求1所述的吊轨式巡检机器人行走机构,其特征在于,所述底部连接板的上方还设有张紧弹簧,张紧弹簧的另一端连接有张紧轮支架,张紧轮设置在张紧轮支架的两侧,并通过张紧轮支架与底部连接板弹性连接。
5.根据权利要求4所述的吊轨式巡检机器人行走机构,其特征在于,所述张紧轮和张紧轮支架可上下移动,通过调整张紧轮的高度以实现对工字型轨道的自适应抱紧。
6.根据权利要求1所述的吊轨式巡检机器人行走机构,其特征在于,所述从动轮组件包括两组通过底部连接板连接的从动轮支座以及设于从动轮支座上的回正支架、回正弹簧、回正轮和从动轮;从动轮设置在从动轮支座顶部,回正弹簧设置在从动轮支架的中部,回正弹簧与回正支架连接,回正轮通过回正支架与从动轮支座弹性连接。
7.根据权利要求6所述的吊轨式巡检机器人行走机构,其特征在于,两组从动轮相对设置在从动轮支座顶部的内侧,从动轮支座顶部的外侧设有编码器支架,编码器安装在编码器支架上并与从动轮平键连接。
8.根据权利要求1-7任一项所述的吊轨式巡检机器人行走机构,其特征在于,所述驱动轮组件与从动轮组件之间通过回正拉簧连接。
技术总结
本发明公开了一种吊轨式巡检机器人行走机构,行走机构挂设在工字型轨道上,包括驱动轮组件、铰接座组件、从动轮组件,驱动轮组件和从动轮组件沿铰接座组件的长度方向间隔布置并通过铰接座组件活动连接,驱动轮组件包括两组通过底部连接板连接的电机支座以及设于电机支座上的回正支架、回正弹簧、回正轮和驱动轮;驱动轮设置在电机支座顶部,回正弹簧设置在电机支座中部,回正弹簧与回正支架连接,回正轮通过回正支架与电机支座弹性连接。本发明通过设置回正支架、回正轮、回正弹簧等组成的回正机构,实现了自动回正的功能,解决了现有技术回正系统不完善,容易出现回正不灵活、转弯不稳定的问题。
技术研发人员:江海洋,李金波
受保护的技术使用者:长沙万为机器人有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!