串联型机械臂主从同构式遥操作力反馈主手的制作方法
本发明涉及机械臂遥操作作业,具体地,涉及一种串联型机械臂主从同构式遥操作力反馈主手。
背景技术:
1、主从遥操作技术需求在目前的社会背景下越来越呈现多样化趋势,带力反馈的遥操作使得操作者可以远端参与控制,根据接触力反馈提高操作的灵巧性和效率,在变电站巡检、制造加工以及微创手术等领域具有广阔的应用前景。目前机械臂开展遥操作作业,一般采用异构式主手,且不具备力反馈功能或仅能实现特定方向力反馈,存在如下缺陷:(1)未能实现主从手完全同构,需要位姿分离设计,结构复杂的同时仅能实现机械臂末端力反馈;(2)来自作业环境的信息反馈较少,出现突发情况时,操作人员无法及时响应,对复杂环境和对象的适应性差;(3)主从映射关系复杂,控制系统运算效率低下,使用者操作不直观。主手作为遥操作系统中重要的人机交互设备,其性能的好坏直接影响着整个系统的可行性。
2、经过对现有技术的检索发现,公开号为cn111839740a的中国发明专利申请《微创手术机器人主从同构式遥操作力反馈主手》,公开了一种主从同构式遥操作力反馈主手,包括万向节机构组件、平动自转组件、平行四边形机构、与平动自转组件连接的操纵手柄;万向节机构组件固定于基座,平动自转组件与万向节机构组件的偏转框架转动连接,平行四边形机构与平动自转组件转动连接,可实现围绕一定点的三维转动和沿操作手柄轴的直线运动四个自由度,对于俯仰、偏航以及直线运动自由度实现了力反馈功能。但是该主手主要应用于特定手术机器人主从力反馈遥操作,未解决通用六自由度机械臂的主从遥操作问题。该主手只实现了四个自由度的运动和其中三个自由度的力反馈,而机械臂主从控制通常需要三个位置和三个姿态的运动和力反馈。
技术实现思路
1、本发明针对现有技术中存在的上述不足,提供了一种串联型机械臂主从同构式遥操作力反馈主手。
2、本发明是通过以下技术方案实现的。
3、本发明提供的一种串联型机械臂主从同构式遥操作力反馈主手,包括:位置调整机构以及安装于所述位置调整机构上的姿态调整机构;其中:
4、所述位置调整机构,包括依次连接的基座、第一无框力矩电机、腰部连杆、第二无框力矩电机、大臂连杆、第三无框力矩电机和小臂连杆,形成串联连接的主手主体结构,并输出力矩、平衡重力、补偿摩擦力和提供关节反馈力;
5、所述姿态调整机构,包括依次连接的第四无框力矩电机、第一连接板、第五无框力矩电机、第二连接板和第六无框力矩电机,形成串联连接的主手末端结构,并提供关节反馈力;
6、所述小臂连杆与所述第四无框力矩电机相连;
7、所述主手主体结构和所述主手末端结构之间形成串联型主从同构式结构。
8、优选地,所述第一无框力矩电机、第二无框力矩电机和第三无框力矩电机分别安装有小速比减速机,形成所述主手主体结构上的第一关节结构、第二关节结构和第三关节结构,并作为所述主手主体结构的动力源提供第一扭力,用于输出力矩、平衡重力、补偿摩擦力和提供关节反馈力。
9、优选地,所述第一扭力为4~6nm。
10、优选地,所述腰部连杆、大臂连杆和小臂连杆的尺寸经从手等比例缩放得到。
11、优选地,所述腰部连杆、大臂连杆和小臂连杆分别采用板状结构。
12、优选地,所述腰部连杆、大臂连杆和/或小臂连杆上设有孔结构。
13、优选地,所述第四无框力矩电机、第五无框力矩电机和第六无框力矩电机分别形成所述主手末端结构上的第四关节结构、第五关节结构和第六关节结构,并作为主手的动力源提供第二扭力,用于提供关节反馈力。
14、优选地,所述第二扭力为0.2~0.4nm。
15、优选地,所述第一连接板和第二连接板的尺寸经从手等比例缩放得到。
16、优选地,所述第一连接板和第二连接板将负载质量均匀分布在电机轴线两边。
17、优选地,上述主手,还包括:弹簧平衡机构,所述弹簧平衡机构安装于所述位置调整机构上,用于配合所述位置调整机构提供扭力以辅助所述位置调整机构平衡部分重力。
18、优选地,所述弹簧平衡机构,包括弹簧安装板和扭簧;其中,所述弹簧安装板与所述位置调整机构的腰部连杆连接,所述扭簧的一端与所述弹簧安装板连接,所述扭簧的另一端与所述位置调整机构的大臂连杆连接。
19、优选地,上述主手,还包括:操纵握把,所述操纵握把安装于所述姿态调整机构的第六无框力矩电机上。
20、优选地,所述操纵握把的末端采用柱状结构。
21、由于采用了上述技术方案,本发明与现有技术相比,具有如下至少一项的有益效果:
22、本发明提供的串联型机械臂主从同构式遥操作力反馈主手,使得操作人员可以及时感知环境信息,开展人机协同作业,远程处置突发问题。机器人对作业环境的感知能力结合操作人员的判断决策能力,能够提高作业灵巧性和效率。
23、本发明提供的串联型机械臂主从同构式遥操作力反馈主手,采用主从手完全同构的机器人设计,位置与姿态不具有耦合关系,简化了机械结构,具有直接的主从映射关系,简化运动学和动力学计算,在提高控制系统运算效率的同时能够增强使用者操作的直观性。
24、本发明提供的串联型机械臂主从同构式遥操作力反馈主手,能够实现六自由度的关节力反馈,便于执行精细化操作,能够大幅提升机械臂对复杂环境和对象的适应性。降低人力成本投入,规避人工操作风险,实现机械臂替代人工执行精细复杂的操作。
25、本发明提供的串联型机械臂主从同构式遥操作力反馈主手,采用串联型主从同构式结构,能够实现主从手完全同构,位置与姿态不具有耦合关系。
26、本发明提供的串联型机械臂主从同构式遥操作力反馈主手,主从映射直接,简化了主手的运动学和动力学计算,在提高控制系统运算效率的同时能够增强使用者操作的直观性。能够实现六自由度的关节力反馈,便于执行精细化操作,提升机械臂对环境的适应性。
技术特征:
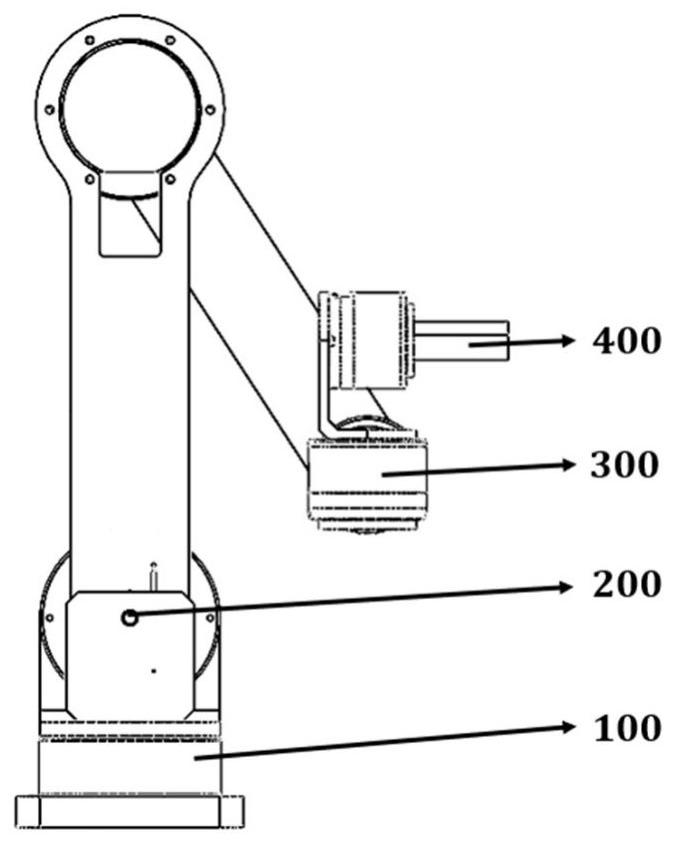
1.一种串联型机械臂主从同构式遥操作力反馈主手,其特征在于,包括:位置调整机构(100)以及安装于所述位置调整机构(100)上的姿态调整机构(300);其中:
2.根据权利要求1所述的串联型机械臂主从同构式遥操作力反馈主手,其特征在于,所述第一无框力矩电机(102)、第二无框力矩电机(104)和第三无框力矩电机(106)分别安装有小速比减速机,形成所述主手主体结构上的第一关节结构、第二关节结构和第三关节结构,并作为所述主手主体结构的动力源提供第一扭力,用于输出力矩、平衡重力、补偿摩擦力和提供关节反馈力。
3.根据权利要求2所述的串联型机械臂主从同构式遥操作力反馈主手,其特征在于,所述第一扭力为4~6nm。
4.根据权利要求2所述的串联型机械臂主从同构式遥操作力反馈主手,其特征在于,还包括如下任意一项或任意多项:
5.根据权利要求1所述的串联型机械臂主从同构式遥操作力反馈主手,其特征在于,所述第四无框力矩电机(301)、第五无框力矩电机(303)和第六无框力矩电机(305)分别形成所述主手末端结构上的第四关节结构、第五关节结构和第六关节结构,并作为主手的动力源提供第二扭力,用于提供关节反馈力。
6.根据权利要求5所述的串联型机械臂主从同构式遥操作力反馈主手,其特征在于,所述第二扭力为0.2~0.4nm。
7.根据权利要求5所述的串联型机械臂主从同构式遥操作力反馈主手,其特征在于,还包括如下任意一项或任意多项:
8.根据权利要求1-7中任一项所述的串联型机械臂主从同构式遥操作力反馈主手,其特征在于,还包括如下任意一项或任意多项:
9.根据权利要求8所述的串联型机械臂主从同构式遥操作力反馈主手,其特征在于,所述弹簧平衡机构(200),包括弹簧安装板(201)和扭簧(202);其中,所述弹簧安装板(201)与所述位置调整机构(100)的腰部连杆(103)连接,所述扭簧(202)的一端与所述弹簧安装板(201)连接,所述扭簧(202)的另一端与所述位置调整机构(100)的大臂连杆(105)连接。
10.根据权利要求8所述的串联型机械臂主从同构式遥操作力反馈主手,其特征在于,所述操纵握把(400)的末端采用柱状结构。
技术总结
本发明提供了一种串联型机械臂主从同构式遥操作力反馈主手,包括:位置调整机构以及安装于其上的姿态调整机构;位置调整机构包括依次连接的基座、第一无框力矩电机、腰部连杆、第二无框力矩电机、大臂连杆、第三无框力矩电机和小臂连杆,形成串联连接的主手主体结构,并输出力矩、平衡重力、补偿摩擦力和提供关节反馈力;姿态调整机构包括依次连接的第四无框力矩电机、第一连接板、第五无框力矩电机、第二连接板和第六无框力矩电机,形成串联连接的主手末端结构,并提供关节反馈力;主手主体结构和主手末端结构之间形成串联型主从同构式结构。本发明能够增强操作直观感,提升作业效率与人机交互用户体验,提升对复杂环境和对象的适应性。
技术研发人员:张伟军,冯家波,孙亮
受保护的技术使用者:上海特机智机器人有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!