一种轨道机器人防撞方法与流程
本发明涉及轨道机器人,特别涉及一种轨道机器人防撞方法。
背景技术:
1、在现代科技的推动下,自动化巡检机器人正逐渐成为工业、仓储和服务领域中不可或缺的一部分。这些智能机器人通过先进的传感器和通信技术,能够在复杂的环境中执行各种任务,提高工作效率,减轻人工负担。然而,在多台巡检机器人同时运行的场景中,碰撞问题成为了一个备受关注的技术挑战,为了确保巡检机器人在执行任务时能够高效而安全地运行,需要解决巡检机器人碰撞技术问题。
技术实现思路
1、为了解决以上问题,本发明提供了一种轨道机器人防撞方法。
2、为实现上述目的,本发明所采用的技术方案如下:
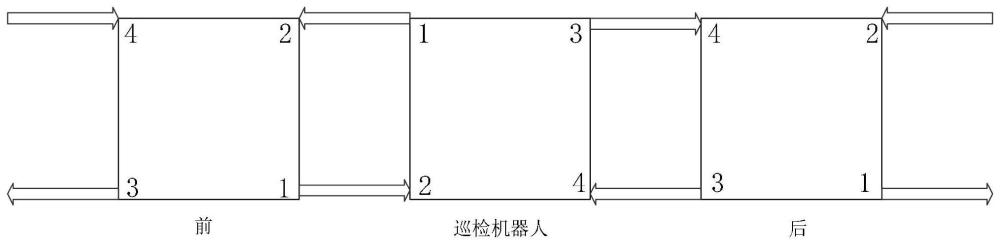
3、一种轨道机器人防撞方法,包括:在巡检机器人上安装的第一lora信号发送模块、第一lora信号接收模块、第二lora信号发送模块以及第二lora信号接收模块;其中,所述第一lora信号发送模块发送lora信号至位于其前方巡检机器人的接收模块,所述第一lora信号接收模块接收位于其前方巡检机器人发送的lora信号;所述第二lora信号发送模块发送lora信号至位于其后方巡检机器人的接收模块,所述第二lora信号接收模块接收位于其后方巡检机器人发送的lora信号。
4、进一步的:所述第一lora信号发送模块、第一lora信号接收模块、第二lora信号发送模块以及第二lora信号接收模块的lora通信包括如下步骤:
5、设定一个时间帧,将整个通信周期划分为若干时隙,每个时隙用于一个设备的数据传输;
6、为lora设备分配一个独特的时隙,确保在同一时间帧内不同设备的时隙不会重叠;
7、每个lora设备在其预定的时隙内传输数据;
8、在lora设备接收端,等待来自网络协调器的确认帧,如果收到确认帧,表示数据传输成功,如果在时隙结束时没有收到确认帧,设备重新尝试在下一个时隙中传输数据;
9、当检测到信号冲突时进行随机退避,等待一个随机的时间片后,再次尝试在其预定的时隙中传输数据。
10、进一步的:所述设定一个时间帧,将整个通信周期划分为若干时隙,每个时隙用于一个设备的数据传输包括:
11、确定整个通信周期的长度tframe;
12、确定整个时间帧内的时隙数量n;
13、使用以下公式计算每个时隙的时长tslot:
14、
15、通过网络协调器通知每个设备其分配的时隙;
16、确定整个时间帧的起始时间tstart,以确保所有设备在同一时间帧内同步。
17、进一步的:所述为lora设备分配一个独特的时隙,确保在同一时间帧内不同设备的时隙不会重叠包括:
18、在网络启动时,所有设备向网络协调器注册并进行身份验证;
19、使用循环轮询分配策略,按照设备注册的顺序为每个设备分配时隙;
20、网络协调器向每个设备发送时隙分配通知,指定其在时间帧中的时隙,通知中包括时隙的起始时间、时隙的持续时间信息;
21、根据网络负载和设备数量的变化,动态调整时隙的分配;
22、如果在时隙分配时发现信号冲突,则重新分配信号冲突的设备时隙或通过通信告知设备在下一时间帧重新尝试。
23、进一步的:所述每个lora设备在其预定的时隙内传输数据包括:
24、在每个时间帧开始之前,网络协调器向每个设备发送时隙预定通知,通知包括设备的id和分配的时隙信息;
25、每个设备在接收到时隙预定通知后,准备好在预定的时隙内传输数据;
26、设备在其预定的时隙内开始数据传输;
27、在数据传输的过程中,设备同时监听通信频道,以检测是否有其他设备在同一时隙内进行数据传输;
28、如果设备检测到与其他设备的信号冲突,则设备在未来的时隙中重新尝试数据传输,以减少信号冲突的发生。
29、进一步的:所述在lora设备接收端,等待来自网络协调器的确认帧,如果收到确认帧,表示数据传输成功,如果在时隙结束时没有收到确认帧,设备重新尝试在下一个时隙中传输数据包括:
30、在接收端,网络协调器监听相应时隙内的数据传输,接收到数据后,进行解析并验证数据的完整性;
31、如果接收到的数据没有发生信号冲突,接收端向发送端发送一个确认帧,表示数据传输成功;
32、在发送端,设备在发送数据后等待一定时间以接收来自接收端的确认帧帧;
33、如果在规定的时间内成功接收到确认帧,表示数据传输成功,设备可以继续下一个时隙的操作;如果未收到确认帧,则设备重新尝试在下一个时隙内传输相同的数据;
34、如果设备在规定时间内未收到确认帧,则触发重传机制。
35、进一步的:所述当检测到信号冲突时进行随机退避,等待一个随机的时间片后,再次尝试在其预定的时隙中传输数据包括:
36、设备在检测到信号冲突后,触发随机退避机制,生成一个随机的等待时间,以避免所有信号冲突设备在同一时间尝试重新传输;
37、设备计算一个随机的等待时间片twait:
38、twait=random(0,2n-1)×tslot
39、其中,n是设备在发生信号冲突时的重试次数,tslot是时隙的时长;
40、设备在计算出的等待时间内保持监听状态,不尝试发送数据;
41、等待时间结束后,设备再次尝试在其预定的时隙内传输数据。
42、进一步的:还包括设置在巡检机器人运行前后两个方向上的激光雷达测距仪。
43、本发明与现有技术相比,所取得的技术进步在于:
44、本发明通过将lora信号发送和接收模块配对,可以实现定向通信,每个巡检机器人的发送模块只与其前方或后方机器人的接收模块配对,确保了通信的定向性,意味着每个巡检机器人只与其前后相邻的机器人进行通信,而不会与其他机器人发生混淆。不同巡检机器人之间使用不同的lora信号模块进行通信,降低了干扰的可能性,通过分配不同的信道或频率,可以确保巡检机器人之间的通信不会相互干扰,从而提高通信的可靠性和稳定性。每个巡检机器人的信号发送和接收是配对的,并建立了时序控制,有助于确保机器人之间的通信按照一定的顺序进行,避免信号冲突和混乱,通过将通信限制在前后相邻的巡检机器人之间,可以在整个系统中创建通信区域,有助于减少系统中的信号交叉,提高通信的精确性和可控性。
技术特征:
1.一种轨道机器人防撞方法,其特征在于,包括:在巡检机器人上安装的第一lora信号发送模块、第一lora信号接收模块、第二lora信号发送模块以及第二lora信号接收模块;其中,所述第一lora信号发送模块发送lora信号至位于其前方巡检机器人的接收模块,所述第一lora信号接收模块接收位于其前方巡检机器人发送的lora信号;所述第二lora信号发送模块发送lora信号至位于其后方巡检机器人的接收模块,所述第二lora信号接收模块接收位于其后方巡检机器人发送的lora信号。
2.根据权利要求1所述的一种轨道机器人防撞方法,其特征在于,所述第一lora信号发送模块、第一lora信号接收模块、第二lora信号发送模块以及第二lora信号接收模块的lora通信包括如下步骤:
3.根据权利要求2所述的一种轨道机器人防撞方法,其特征在于,所述设定一个时间帧,将整个通信周期划分为若干时隙,每个时隙用于一个设备的数据传输包括:
4.根据权利要求3所述的一种轨道机器人防撞方法,其特征在于,所述为lora设备分配一个独特的时隙,确保在同一时间帧内不同设备的时隙不会重叠包括:
5.根据权利要求4所述的一种轨道机器人防撞方法,其特征在于,所述每个lora设备在其预定的时隙内传输数据包括:
6.根据权利要求5所述的一种轨道机器人防撞方法,其特征在于,所述在lora设备接收端,等待来自网络协调器的确认帧,如果收到确认帧,表示数据传输成功,如果在时隙结束时没有收到确认帧,设备重新尝试在下一个时隙中传输数据包括:
7.根据权利要求6所述的一种轨道机器人防撞方法,其特征在于,所述当检测到信号冲突时进行随机退避,等待一个随机的时间片后,再次尝试在其预定的时隙中传输数据包括:
8.根据权利要求1或2所述的一种轨道机器人防撞方法,其特征在于,还包括设置在巡检机器人运行前后两个方向上的激光雷达测距仪。
技术总结
本发明公开了一种轨道机器人防撞方法,包括:在巡检机器人上安装的第一LoRa信号发送模块、第一LoRa信号接收模块、第二LoRa信号发送模块以及第二LoRa信号接收模块;其中,所述第一LoRa信号发送模块发送LoRa信号至位于其前方巡检机器人的接收模块,所述第一LoRa信号接收模块接收位于其前方巡检机器人发送的LoRa信号;所述第二LoRa信号发送模块发送LoRa信号至位于其后方巡检机器人的接收模块,所述第二LoRa信号接收模块接收位于其后方巡检机器人发送的LoRa信号。本发明可以帮助巡检机器人识别前后方其他机器人的位置,从而避免相互碰撞。
技术研发人员:闫满囤,梁泽龙,高菁,张凌恺,田森,崔建宝,陈伟,黄伟亮,杜祎宁,尹春辉,孙计山,罗晓瑶,袁瑞,王艳红,任一齐,田鸿泽,陈志浦,刘兵
受保护的技术使用者:河北交投智能科技股份有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!