基于仿生机理的末端连续体机械臂
本发明涉及连续体机器臂技术,尤其涉及一种基于仿生机理的末端连续体机械臂。
背景技术:
1、连续体机械臂以自身的柔性使其具有更高的安全性和更好的环境交互性,因此在工业生产、医疗服务、航空航天等领域有着广泛的应用前景。机械臂的操纵、感知和控制能力大大提高了人类的操作能力,与刚性机械臂相比,连续体机械臂的自由度更高,交互能力更强。其卓越的变形特性使机械臂能够展现出更丰富的运动模式。
2、目前存在的问题:
3、1)现有的末端机械臂,由于其抓指的刚度较强,导致其在抓取物体时,会与被抓取物体之间产生较大的相互反作用力,这样可能会导致两种情况发生,抓指本身受到损伤,亦或使被抓取物体遭受损伤,从而使得抓取效果不佳,达不到理想的要求。
4、2)现有的末端连续体机械臂,有的采用软材料制成,充分发挥了材料的自身柔顺性,有的通过气体或液体致动,但对于一些尖锐的物体的抓取和捕获具有一定的局限性。需要可充分发挥材料柔顺性有具有高效的缓冲特性的末端连续体机械臂。
5、3)现有的末端连续体机械臂,通常只抓取静态的物体,而对运动的物体进行捕获抓取还相对较少。蝙蝠可在黑夜中对移动的物体实现精准的捕获,然而目前基于视觉反馈的机械臂在光线不佳或者无光的环境下不易实现操纵,因此针对这种特殊环境有必要提供一种有效的反馈捕获策略。
技术实现思路
1、本发明的目的在于提供一种基于仿生机理的末端连续体机械臂,其中抓指的指尖部仿照人类手指指尖部设计,从而能够自适应所抓握物体的反作用力。
2、为了实现上述技术目的,本发明采用如下技术方案:
3、一种基于仿生机理的末端连续体机械臂,所述末端连续体机械臂具有n个能够做捕获动作的抓指;
4、所述抓指的指尖部设置有表皮仿生层、脂肪仿生层、指骨仿生层和甲床仿生部。
5、进一步地,所述末端连续体机械臂包括基座和致动座;
6、所述基座内设置有驱动器件;
7、所述致动座通过导向滑动机构与基座装配在一起,致动座与基座之间能够沿着导向滑动机构的导向方向做相对位移动作;
8、所述抓指具有定位端和致动端,所述定位端与基座装配连接,所述致动端与致动座装配连接;
9、在基座与致动座之间设置有致动绳索,所述致动绳索的一端与致动座连接,致动绳索的另一端受所述驱动器件驱动;
10、在驱动器件驱动下,致动绳索能够牵引致动座朝向基座做位移移动,n个抓指则会互相配合做捕获动作。
11、进一步地,所述致动座通过导向滑动机构与基座装配在一起,其具体实现的结构形式为:所述导向滑动机构包括6根滑杆,对于每根滑杆而言,其一端与致动座固定连接,另一端穿设于基座上设置的滑杆孔中,从而实现滑动式装配,所有6根滑杆均匀离散地分布在基座与致动座之间。
12、进一步地,所述n为6,即,所述末端连续体机械臂具有6个能够做捕获动作的抓指。
13、进一步地,所述末端连续体机械臂设置有超声波探测器,所述超声波探测器的探测方向朝向抓握方向,超声波探测器用于对即将进入抓握区域的物体进行位置探测;
14、设置信号分析控制程序,所述信号分析控制程序对超声波探测器的探测信号进行分析,得出外来物体到达抓握区域的具体位置,依据分析结果来控制做捕获动作。
15、进一步地,所述信号分析控制程序对超声波探测器的探测信号进行分析,其分析算法为反馈捕获移动物体算法;
16、所述反馈捕获移动物体算法具体如下:
17、比较δ和ld,
18、当δ>ld时,
19、则:驱动器件不致动,使末端连续体机械臂处于张开状态;
20、否则:驱动器件开始启动,末端连续体机械臂开始做捕获动作,在做捕获动作的同时,实时对δ的变化情况进行测算、判断及反馈:
21、当δ是常值时,
22、则:判定末端连续体机械臂已经稳定抓取物体,然后控制驱动器件停止致动,末端连续体机械臂停止捕获动作;
23、否则:判定物体仍未稳定捕获,从而继续控制驱动器件致动,末端连续体机械臂进一步进行致动动作;
24、所述ld表示预先设定的可捕获距离;所述δ表示超声波探测器测量的实时距离。
25、进一步地,所述ld预先设定为超声波探测器到抓指指尖端的直线距离。
26、在本发明的末端连续体机械臂中,抓指的指尖部的设计是仿照人类手指指尖部设计的,其设置有表皮仿生层、脂肪仿生层、指骨仿生层和甲床仿生部,这样一来,在进行捕获动作接触所抓取物体时,抓指的指尖部具有极佳的缓冲和吸能特性,对于表面尖锐的物体表现出极强的自适应性,抓指与物体两者之间不会互相造成损伤,从而实现了较好的捕获效果。
27、在本发明的末端连续体机械臂中设置有超声波探测器,并且对应地设置有信号分析控制程序,该超声波探测器能够对即将进入抓握区域的物体进行探测,所述信号分析控制程序能够对接收到的超声波探测器的探测信号进行分析,以分析得出外来物体到达抓握区域的具体位置的分析结果,然后依据该分析结果来控制捕获动作,以保证做出捕获动作的时刻与物体到达抓握区域的时刻相匹配,通过实时的循环反馈,从而实现对运动物体的准确捕获。
技术特征:
1.一种基于仿生机理的末端连续体机械臂,其特征在于:所述末端连续体机械臂具有n个能够做捕获动作的抓指(3);
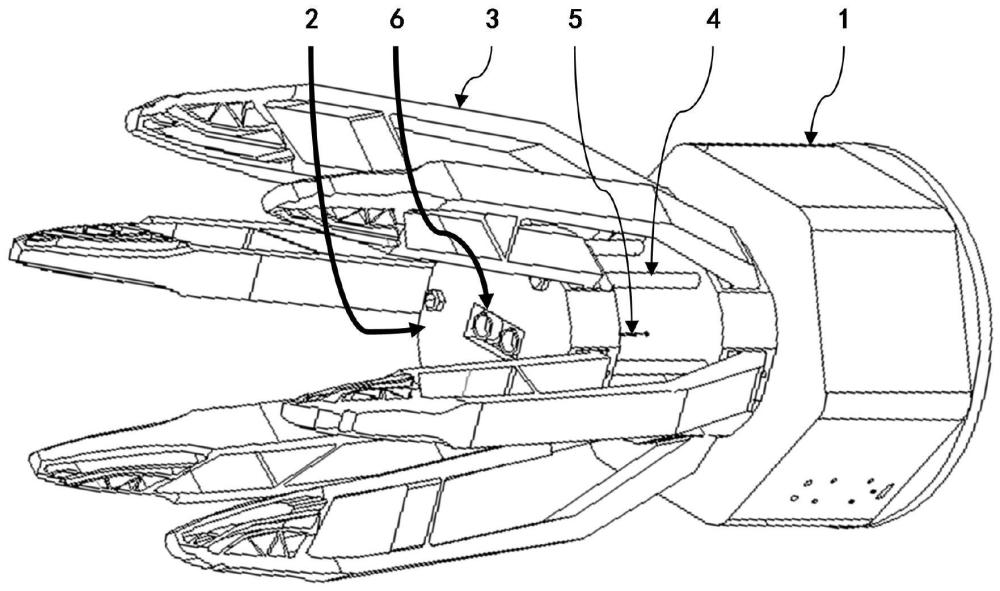
2.根据权利要求1所述基于仿生机理的末端连续体机械臂,其特征在于:所述末端连续体机械臂包括基座(1)和致动座(2);
3.根据权利要求2所述基于仿生机理的末端连续体机械臂,其特征在于:所述致动座(2)通过导向滑动机构与基座(1)装配在一起,其具体实现的结构形式为:所述导向滑动机构包括6根滑杆(4),对于每根滑杆(4)而言,其一端与致动座(2)固定连接,另一端穿设于基座(1)上设置的滑杆孔中,从而实现滑动式装配,所有6根滑杆(4)均匀离散地分布在基座(1)与致动座(2)之间。
4.根据权利要求1所述基于仿生机理的末端连续体机械臂,其特征在于:所述n为6,即,所述末端连续体机械臂具有6个能够做捕获动作的抓指(3)。
5.根据权利要求1所述基于仿生机理的末端连续体机械臂,其特征在于:所述末端连续体机械臂设置有超声波探测器(6),所述超声波探测器(6)的探测方向朝向抓握方向,超声波探测器(6)用于对即将进入抓握区域的物体进行位置探测;
6.根据权利要求5所述基于仿生机理的末端连续体机械臂,其特征在于:所述信号分析控制程序对超声波探测器(6)的探测信号进行分析,其分析算法为反馈捕获移动物体算法;
7.根据权利要求6所述基于仿生机理的末端连续体机械臂,其特征在于:所述ld预先设定为超声波探测器(6)到抓指(3)指尖端的直线距离。
技术总结
本发明公开了一种基于仿生机理的末端连续体机械臂。该末端连续体机械臂具有n个抓指(3);所述抓指的指尖部设置有表皮仿生层(31)、脂肪仿生层(32)、指骨仿生层(33)和甲床仿生部(34);基于提出的多层缓冲模型设计的抓指将具有高度的缓冲吸能特性,可实现对尖锐物体的无损抓取。基于仿生原理,末端连续体机械臂设置有超声波探测器(6),以高效获取运动物体的具体位置;设置信号分析控制算法对探测信号进行测算,可实现对运动物体位置状态的实时反馈。依据测算结果来控制致动动作;通过循环反馈机制,智能地判断物体是否处于稳定捕获状态。这种反馈捕获设计具有卓越的适应性,能够在光线不佳甚至无光环境下成功完成捕获任务。
技术研发人员:武廷科,刘铸永
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!