一种分段式轨道及便于机器人攀爬的铁塔的制作方法
本发明涉及铁塔维护机器人辅助,尤其涉及一种分段式轨道及便于机器人攀爬的铁塔。
背景技术:
1、电力铁塔需要使用机器人进行巡检维护。机器人一般设置有攀爬足和履带,通过攀爬足和履带的配合机器人可以从铁塔的底部沿铁塔上下移动,从而在移动过程中完成对铁塔的巡检维护。在运行过程中,攀爬足用于与铁塔之间夹合(或吸附)并通过变形来使得机器人抬升与铁塔相离然后在另一处与铁塔相抵,即使得履带间隙的与铁塔相抵,然后再通过履带移动一段距离,再通过攀爬足抬起使得履带在铁塔另一处与铁塔相抵,如此往复。即现有技术中,机器人的履带必须抵在相应的铁塔上,在没有附着基础的部位则只能依靠攀爬足,给机器人的移动造成了一定的限制,机器人可能需要绕行才能到达特点部位,最终使得巡检效率较低。
技术实现思路
1、针对现有技术中所存在的不足,本发明提供了一种分段式轨道,其解决了现有技术中机器人必须依靠铁塔提供附着基础可能导致绕行使得巡检效率较低的问题。
2、根据本发明的实施例,一种分段式轨道,其包括:
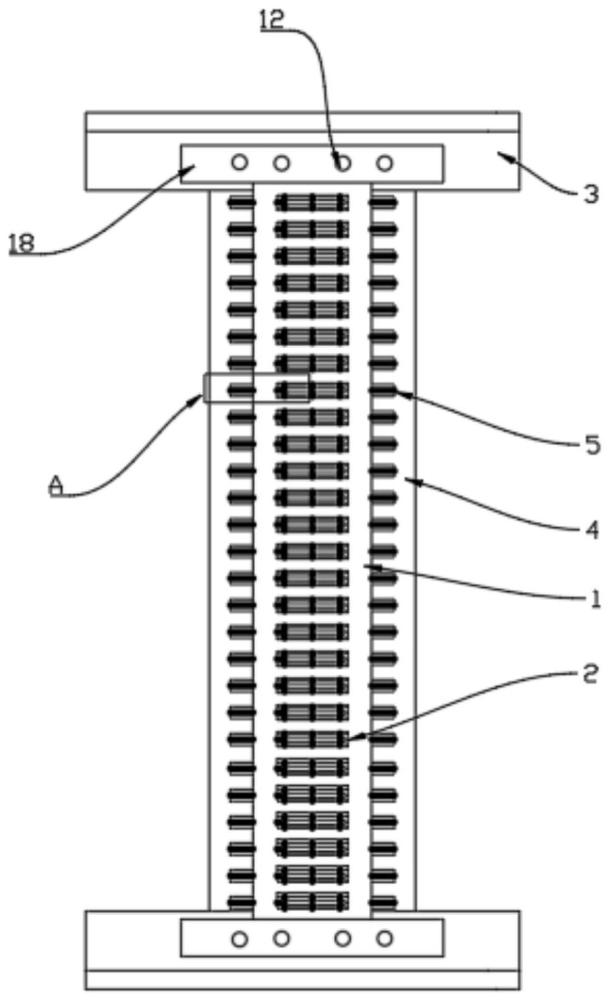
3、长条形的外层板,所述外层板上沿其长度方向等距间隔设置有若干第一通框;
4、一对安装臂,所述外层板的两端分别与两所述安装臂连接;
5、长条形的底板,所述底板的两端分别与两所述安装臂连接,所述外层板具有在所述底板上的垂直投影且所述底板上还开设有与每一所述第一通框一一对应的若干第二通框,每一所述第二通框内均弹性连接有顶块;
6、分段式轨道供机器人行走,所述机器人包括外壁设置有弹性齿的履带,且所述弹性齿能经所述第一通框后与所述第二通框中的所述顶块相抵。
7、上述实施例中,通过设置的分段式轨道可以提供更多的附着路径,从而为机器人提供更多的路径,机器人移动效率能够更高,从而解决了现有技术中机器人必须依靠铁塔提供附着基础可能导致绕行使得巡检效率较低的问题。
8、进一步地,还包括盖板,所述底板两端还固定连接有l形连接板,所述l形连接板、所述安装臂、所述外层板的一端以及所述盖板依次设置且通过螺栓连接。
9、进一步地,所述第一通框和所述第二通框均沿所述外层板的宽度方向延伸设置,且所述第二通框的两端分别位于所述外层板的两侧。
10、进一步地,所述第二通框内的正对两内壁之间分别固定连接有相互交错的横向弹性绳和竖向弹性绳,所述顶块背离所述外层板的一面与所述横向弹性绳和所述竖向弹性绳的交错部位固定连接,另一面超出所述第二通框与所述外层板相近。
11、进一步地,所述顶块的侧壁与所述第二通框的内壁之间还固定连接有加强弹性绳。
12、进一步地,所述顶块朝向所述外层板的一面凹陷设置有弧形槽。
13、进一步地,所述第一通框的宽度小于所述第二通框的宽度且所述顶块具有位于所述第一通框内的正投影。
14、根据本发明的实施例,还提供了一种便于机器人攀爬的铁塔,其包括上述的分段式轨道。
15、进一步地,还包括相互固定连接的若干连接段,两所述安装臂分别与其中两所述连接段固定连接。
16、相比于现有技术,本发明具有如下有益效果:
17、通过分段式轨道为机器人提供了更多的移动路径,解决了现有技术中机器人必须依靠铁塔提供附着基础可能导致绕行使得巡检效率较低的问题;同时,提供的分段式轨道上的第一通框和第二通框可以供风穿行,避免增加阻力使得铁塔的风阻过大的增加。
技术特征:
1.一种分段式轨道,其特征在于,包括:
2.如权利要求1所述的分段式轨道,其特征在于,还包括盖板,所述底板两端还固定连接有l形连接板,所述l形连接板、所述安装臂、所述外层板的一端以及所述盖板依次设置且通过螺栓连接。
3.如权利要求1所述的分段式轨道,其特征在于,所述第一通框和所述第二通框均沿所述外层板的宽度方向延伸设置,且所述第二通框的两端分别位于所述外层板的两侧。
4.如权利要求1所述的分段式轨道,其特征在于,所述第二通框内的正对两内壁之间分别固定连接有相互交错的横向弹性绳和竖向弹性绳,所述顶块背离所述外层板的一面与所述横向弹性绳和所述竖向弹性绳的交错部位固定连接,另一面超出所述第二通框与所述外层板相近。
5.如权利要求4所述的分段式轨道,其特征在于,所述顶块的侧壁与所述第二通框的内壁之间还固定连接有加强弹性绳。
6.如权利要求4所述的分段式轨道,其特征在于,所述顶块朝向所述外层板的一面凹陷设置有弧形槽。
7.如权利要求3所述的分段式轨道,其特征在于,所述第一通框的宽度小于所述第二通框的宽度且所述顶块具有位于所述第一通框内的正投影。
8.一种便于机器人攀爬的铁塔,其特征在于,包括如权利要求1-7中任一项所述的分段式轨道。
9.如权利要求8所述的便于机器人攀爬的铁塔,其特征在于,还包括相互固定连接的若干连接段,两所述安装臂分别与其中两所述连接段固定连接。
技术总结
本发明提供了一种分段式轨道,其包括:长条形的外层板,所述外层板上沿其长度方向等距间隔设置有若干第一通框;一对安装臂,所述外层板的两端分别与两所述安装臂连接;长条形的底板,所述底板的两端分别与两所述安装臂连接,所述外层板具有在所述底板上的垂直投影且所述底板上还开设有与每一所述第一通框一一对应的若干第二通框,每一所述第二通框内均弹性连接有顶块;分段式轨道供机器人行走,所述机器人包括外壁设置有弹性齿的履带,且所述弹性齿能经所述第一通框后与所述第二通框中的所述顶块相抵。本发明解决了现有技术中机器人必须依靠铁塔提供附着基础可能导致绕行使得巡检效率较低的问题。同时提供了一种便于机器人攀爬的铁塔。
技术研发人员:李向荣,刘祖春,邓兵,陈卫东,张强,朱江涛,张旭
受保护的技术使用者:宜昌市东明科技开发有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!