一种六轴机械手臂的制作方法
本申请涉及智能制造,具体涉及一种六轴机械手臂。
背景技术:
1、在智能制造领域,通常使用多轴机械手臂替代人工进行物品转移和加工。当需要转移物品时,通常需要在六轴机械臂的末端携带的手爪抓取机构。通过机械手臂可以提高制造效率,减少人力投入,但多轴机械手臂只能在一定范围内进行操作,其范围小于多轴机械臂的活动范围。而为了扩大多轴机械手臂的作业范围,常用的作法是增大多轴机械手臂的尺寸,或在机械手臂的底部设置行走机构。然后这样不仅会增大多轴机械手臂的重量,使其移动的惯性增大,影响多轴机械手臂的移动速度,并且增加行走机械也会增大多轴机械手臂的控制难度,特别是无法进行高精度的操作。
2、另外,当多轴机械臂手爪的操作活动范围较大、抓取点较多时,多轴机械手臂末端的手爪上连接的管线,也会因为动作范围大造成缠绕、拉扯,从而影响多轴机械手臂的工作稳定性及管线的寿命。并且手爪上连接的管线较多时,管线难以布线和固定,设备维护时难以区分各管线。
技术实现思路
1、鉴于上述问题,本申请提供了一种六轴机械手臂,用于解决现有多轴机械手臂作业范围小以及移动惯性大的技术问题。
2、为实现上述目的,发明人提供了一种六轴机械手臂,包括:
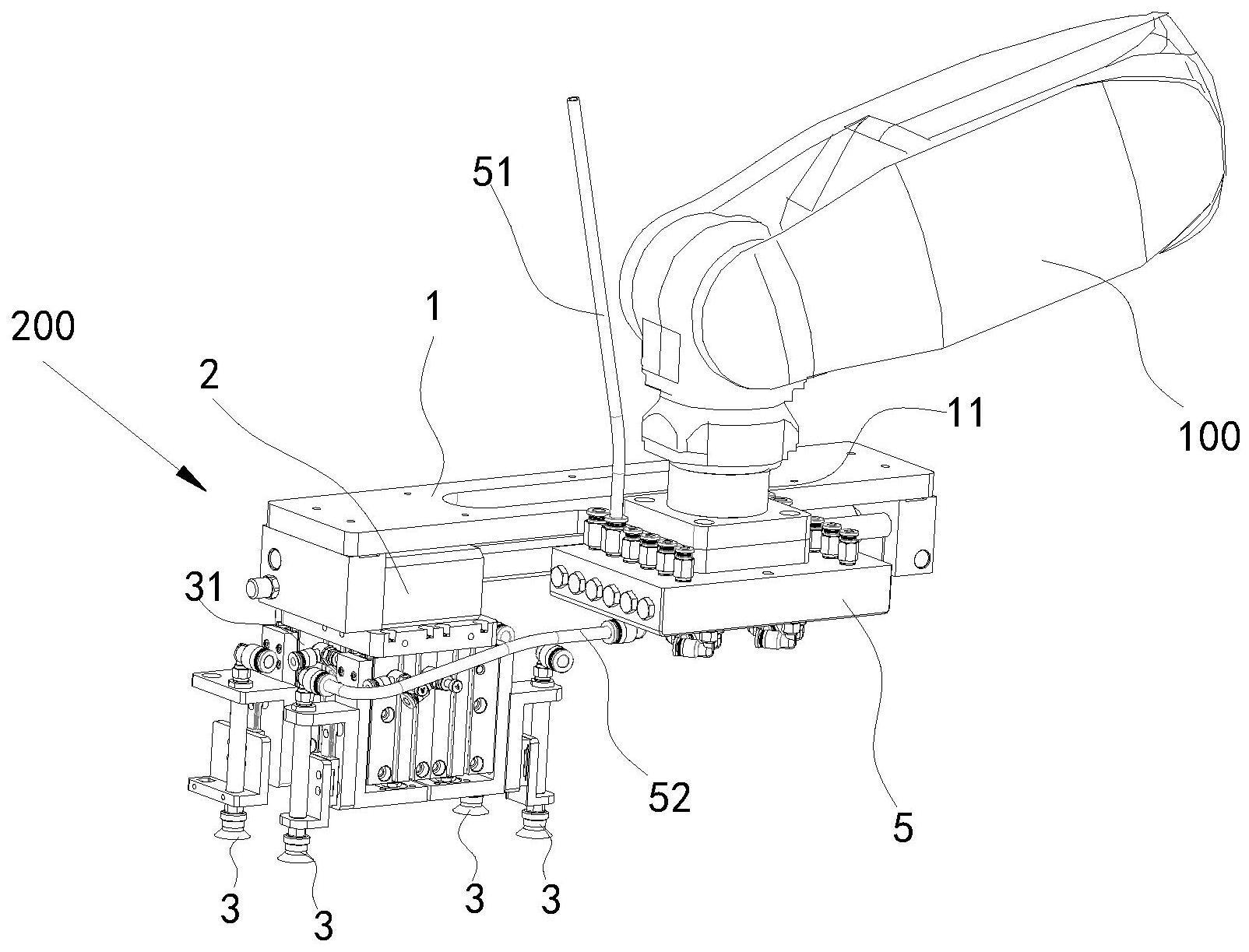
3、六轴机械手臂本体;以及手爪,所述手爪设置于所述六轴机械手臂本体的末端,所述手爪包括:吸盘、滑动机构、支架和回转法兰;
4、所述支架通过所述回转法兰可旋转的设置于所述六轴机械手臂本体的末端;所述滑动机构设置于所述支架的下表面,所述滑动机构包括伸缩气缸、滑块和导杆,所述导杆平行所述支架固定安装,所述滑块可滑动的设置于所述导杆上,所述伸缩气缸用于驱动所述滑块沿所述导杆滑动;所述吸盘设置于所述滑块的下表面用于抓取物品。
5、进一步的,所述手爪还包括升降气缸,所述吸盘设置于所述升降气缸的推杆的末端,所述升降气缸用于带动所述吸盘沿竖直方向升降。
6、进一步的,所述手爪还包括气管转接板,所述气管转接板安装于所述支架上且与所述回转法兰同轴设置,所述气管转接板包括多个输入接口和多个输出接口,所述输入接口连接气源,所述输出接口通过气管与所述滑动机构和所述吸盘连接。
7、进一步的,所述输入接口位于所述气管转接板的上表面,所述输出接口位于所述气管转接板的下表面。
8、进一步的,所述手爪还包括摄像机,所述摄像机设置于所述滑动机构的下表面,用于获取所述物品的图像。
9、进一步的,所述回转法兰连接有回转马达,所述回转马达通过减速器与所述回转法兰传动连接。
10、进一步的,所述回转法兰设置于所述支架中部的一侧,且与所述支架的两端形成品字形分布。
11、进一步的,所述支架的中部设置有镂空的减重孔。
12、区别于现有技术,上述技术方案六轴机械手臂,包括:六轴机械手臂本体和手爪;所述手爪设置于所述六轴机械手臂本体,所述手爪包括:吸盘、滑动机构、支架和回转法兰;所述支架通过所述回转法兰可旋转的设置于所述六轴机械手臂本体的末端;所述滑动机构设置于所述支架的下表面,所述滑动机构包括伸缩气缸、滑块和导杆,所述导杆平行所述支架固定安装,所述滑块可滑动的设置于所述导杆上,所述伸缩气缸用于驱动所述滑块沿所述导杆滑动;所述吸盘设置于所述滑块的下表面用于抓取物品。本实用新型在手爪上设置有滑动机构,可以提高六轴机械手臂的作业范围,且可减少六轴机械手臂的移动惯性,从而大大提高物品转移效率。
13、在一些实施例中,物品转移装置还包括气管转接板,连接于手爪的气管由气管转接板进行转接和固定,便于气管布线,减少气管弯折和拉扯,可有效延长气管使用寿命。
14、上述
技术实现要素:
相关记载仅是本申请技术方案的概述,为了让本领域普通技术人员能够更清楚地了解本申请的技术方案,进而可以依据说明书的文字及附图记载的内容予以实施,并且为了让本申请的上述目的及其它目的、特征和优点能够更易于理解,以下结合本申请的具体实施方式及附图进行说明。
技术特征:
1.一种六轴机械手臂,其特征在于,包括:
2.根据权利要求1所述的六轴机械手臂,其特征在于,所述手爪还包括升降气缸,所述吸盘设置于所述升降气缸的推杆的末端,所述升降气缸用于带动所述吸盘沿竖直方向升降。
3.根据权利要求1或2所述的六轴机械手臂,其特征在于,所述手爪还包括气管转接板,所述气管转接板安装于所述支架上且与所述回转法兰同轴设置,所述气管转接板包括多个输入接口和多个输出接口,所述输入接口连接气源,所述输出接口通过气管与所述滑动机构和所述吸盘连接。
4.根据权利要求3所述的六轴机械手臂,其特征在于,所述输入接口位于所述气管转接板的上表面,所述输出接口位于所述气管转接板的下表面。
5.根据权利要求1所述的六轴机械手臂,其特征在于,所述手爪还包括摄像机,所述摄像机设置于所述滑动机构的下表面,用于获取所述物品的图像。
6.根据权利要求1所述的六轴机械手臂,其特征在于,所述回转法兰连接有回转马达,所述回转马达通过减速器与所述回转法兰传动连接。
7.根据权利要求1所述的六轴机械手臂,其特征在于,所述回转法兰设置于所述支架中部的一侧,且与所述支架的两端形成品字形分布。
8.根据权利要求1所述的六轴机械手臂,其特征在于,所述支架的中部设置有镂空的减重孔。
技术总结
本技术公开了一种六轴机械手臂,包括:六轴机械手臂本体和手爪;所述手爪设置于所述六轴机械手臂本体,所述手爪包括:吸盘、滑动机构、支架和回转法兰;所述支架通过所述回转法兰可旋转的设置于所述六轴机械手臂本体的末端;所述滑动机构设置于所述支架的下表面,所述滑动机构包括伸缩气缸、滑块和导杆,所述导杆平行所述支架固定安装,所述滑块可滑动的设置于所述导杆上,所述伸缩气缸用于驱动所述滑块沿所述导杆滑动;所述吸盘设置于所述滑块的下表面用于抓取物品。本技术在手爪上设置有滑动机构,可以提高六轴机械手臂的作业范围,且可减少六轴机械手臂的移动惯性,从而大大提高物品转移效率。
技术研发人员:邓福钦,黄春机
受保护的技术使用者:福建星网元智科技有限公司
技术研发日:20230131
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!