一种单臂五轴伺服机械手的制作方法
本技术涉及机械手,具体涉及到一种单臂五轴伺服机械手。
背景技术:
1、随着社会的发展,自动化生产越来越普遍了,很多生产中的操作都会通过机械手来完成,机械手可以代替人工进行反复的枯燥工作,各类单臂多轴伺服机械手在生产中被使用,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门,机械手上下运行速度较快,在进行使用机械手时,需要改进的地方:
2、在进行使用机械手时,正常情况下通过伸缩调件来伸缩调整夹持组件的间距,在通过插接杆将夹持组件限定在卡杆上,通过两个夹持组件互相配合对加工物件进行抵压夹持住物品,有效保持加工物件的稳定性,可以稳定将加工物件进行移动调整到生产位置上进行加工,当夹持组件在对加工物件进行夹持时,由于加工物件呈上大下小的不规则形状,其中间位置会有个凹弧的位置,夹持组件在夹持加工物件过程中,会随之出现与加工物件凹弧位置的上端吻合包裹,反之加工物件凹弧位置的下端与夹持组件之间会随之存有一定空隙,使得夹持组件无法覆盖住加工物件的凹弧位置上,因此加工物件在加工中,会因为重心引力的作用下随之向下滑动,无法稳定对夹持组件进行夹持,从而降低了机械手的使用性。
技术实现思路
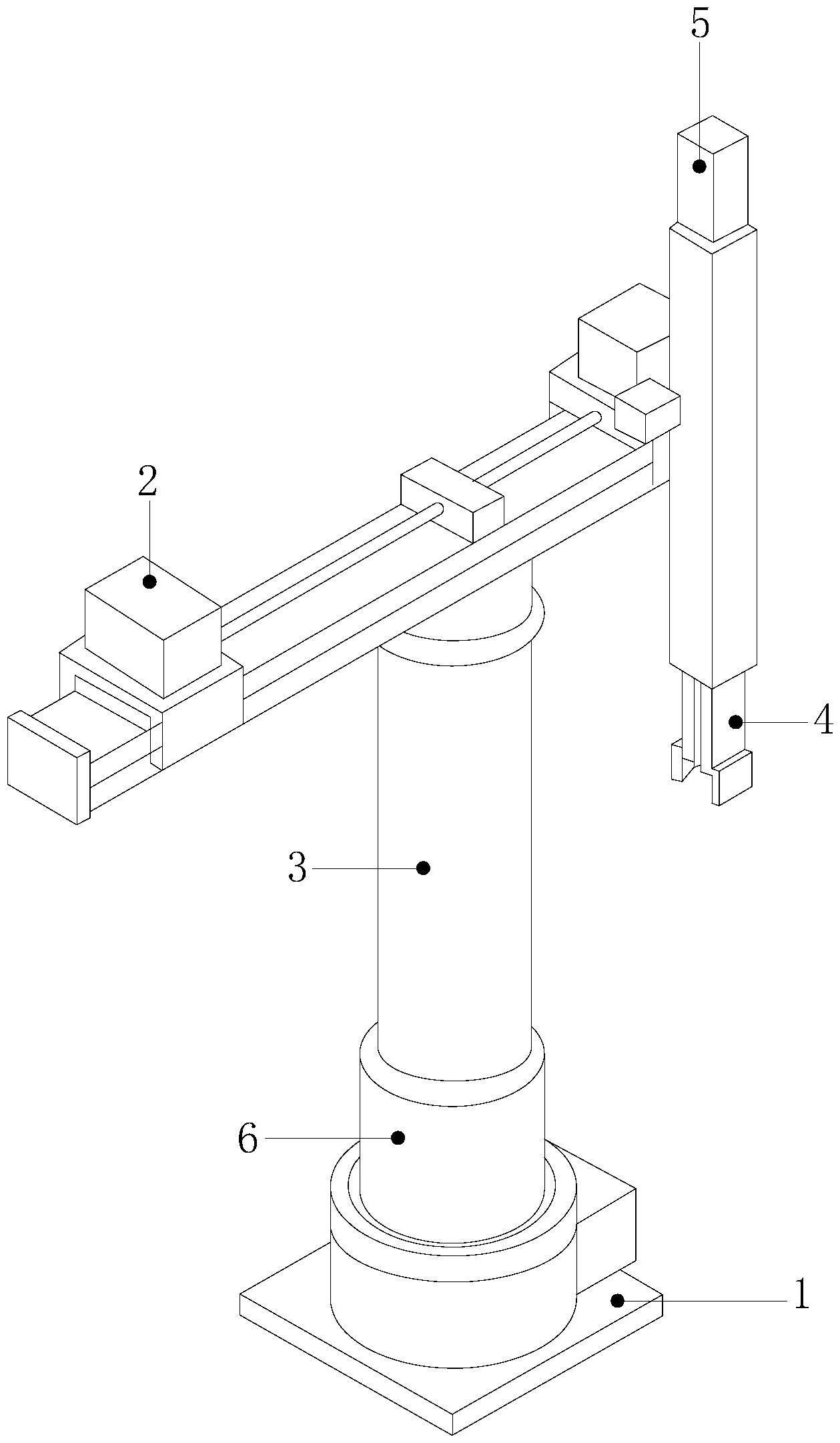
1、为了实现上述目的,本实用新型是通过如下的技术方案来实现:一种单臂五轴伺服机械手,其结构包括底板、固定座、液压杆、调节架、机械手、夹持装置,所述底板上安装有固定座,所述固定座上插接有液压杆,所述液压杆另一端安装有调节架,所述调节架一端连接有机械手,所述机械手下端设有夹持装置。
2、作为
技术实现要素:
的进一步改进,所述夹持装置包括有夹持组件、连接插件、安装杆、伸缩拉件、定位杆,所述夹持组件设有两个,两根夹持组件对称安装在两根定位杆上,所述定位杆一侧设有连接插件,所述连接插件贯穿定位杆与夹持组件末端相接,所述定位杆连接在安装杆上,两个所述安装杆之间设有伸缩拉件,所述安装杆安装在机械手下端。
3、作为实用新型内容的进一步改进,所述夹持组件包括有接板、牵拉件、调节块、压杆、承托组件、张合牵件、弹性件,所述接板两侧均设有承托组件且两者活动连接,两个所述承托组件之间设有张合牵件,所述张合牵件安装在压杆端部,所述压杆与张合牵件之间设有弹性件,所述压杆贯穿伸入调节块内部与牵拉件相接,所述调节块通过定位杆与连接插件相接。
4、作为实用新型内容的进一步改进,所述承托组件包括有叠压件、卡弧臂、三角张件、摆动块、接触贴件、接头,所述叠压件一端与三角张件相接,另一端与摆动块相接,所述摆动块设有两块,两块摆动块对称设立在卡弧臂左右两侧,两块摆动块上端连接有接触贴件,所述接触贴件与叠压件相贴合,所述接触贴件下端连接有接头,所述接头安装在三角张件上,所述卡弧臂与接板通过转轴活动连接,所述卡弧臂上连接有张合牵件。
5、作为实用新型内容的进一步改进,所述接触贴件包括有对接件、推杆、辅助支件、辅撑弹片、弹韧垫、衔接块,所述对接件上贴合有弹韧垫,所述弹韧垫下端与辅撑弹片相接,所述辅撑弹片设有两片,两片辅撑弹片通过衔接块对称连接,所述衔接块与推杆吻合连接,所述推杆下端设在对接件内部下端,所述推杆左右两侧均设有辅助支件,所述辅助支件另一端与辅撑弹片相接,所述对接件与摆动块、叠压件相接,所述对接件下端与接头相连。
6、作为实用新型内容的进一步改进,两个所述承托组件通过接板连接构成“(”形结构。
7、作为实用新型内容的进一步改进,所述对接件下端呈波浪状结构与叠压件吻合连接。
8、作为实用新型内容的进一步改进,所述三角张件由多片三角板对接构成等腰三角形结构,三角张件连接在两个叠压件之间,两个叠压件在三角张件的作用下进行张合活动。
9、作为实用新型内容的进一步改进,所述弹韧垫采用软胶材料制成,且其内部贯穿连接有牵拉条,可以有效配合弹韧垫起到有效的弹性作用。
10、有益效果
11、本实用新型一种单臂五轴伺服机械手,具有以下有益效果:
12、1、本实用新型通过夹持组件、连接插件、安装杆、伸缩拉件、定位杆,两根安装杆之间设有伸缩拉件,两根安装杆在伸缩拉件的作用下可以跟随着加工物件的大小进行调整,在通过连接插件带动夹持组件在定位杆上进行移动调整,使得两个夹持组件可以有效对加工物件进行夹持包裹。
13、2、本实用新型通过接板、弹拉导件、调节块、压杆、承托组件、张合牵件、弹性件,调节块通过定位杆在安装杆的作用下随之调位,两个承托组件在张合牵件的作用下随之向外打开,承托组件在与加工物件相接触后,两者之间会产生对压力,压杆在受到接触压力后会在调节块内部移动压制弹拉导件而向内回缩,两个承托组件随着加工物件的形变弧度进行摆动调整,从而分散抵在加工物件上,可以稳定对加工物件进行夹持。
14、3、本实用新型通过对接件、推杆、辅助支件、辅撑弹片、弹韧垫、衔接块,两块辅撑弹片连接在弹韧垫下端,弹韧垫在与加工物件相接触后,两块辅撑弹片在受到弹韧垫向下的推压力后会随之压制打开,其下端连接的辅助支件在受力后会随之延展开,从而辅助推杆对辅撑弹片向上支撑,使得辅撑弹片与弹韧垫可以稳定贴合在一起,从而将弹韧垫向外顶出与加工物件吻合连接。
技术特征:
1.一种单臂五轴伺服机械手,其结构包括底板(1)、固定座(6)、液压杆(3)、调节架(2)、机械手(5)、夹持装置(4),其特征在于:
2.根据权利要求1所述的一种单臂五轴伺服机械手,其特征在于:所述夹持组件(q1)包括有接板(r11)、牵拉件(i15)、调节块(t12)、压杆(u14)、承托组件(p16)、张合牵件(y13)、弹性件(a17),所述接板(r11)与承托组件(p16)活动连接,所述承托组件(p16)上设有张合牵件(y13),所述张合牵件(y13)安装在压杆(u14)上,所述压杆(u14)与张合牵件(y13)之间设有弹性件(a17),所述压杆(u14)贯穿伸入调节块(t12)与牵拉件(i15)相接,所述调节块(t12)通过定位杆(t4)与连接插件(e3)相接。
3.根据权利要求2所述的一种单臂五轴伺服机械手,其特征在于:所述承托组件(p16)包括有叠压件(k31)、卡弧臂(z33)、三角张件(v36)、摆动块(x34)、接触贴件(l32)、接头(c35),所述叠压件(k31)与三角张件(v36)、摆动块(x34)相接,所述摆动块(x34)设在卡弧臂(z33)上,摆动块(x34)上的接触贴件(l32)与叠压件(k31)相贴合,所述接触贴件(l32)上的接头(c35)安装在三角张件(v36)上,所述卡弧臂(z33)与接板(r11)通过转轴活动连接,所述卡弧臂(z33)上连接有张合牵件(y13)。
4.根据权利要求3所述的一种单臂五轴伺服机械手,其特征在于:所述接触贴件(l32)包括有对接件(d21)、推杆(f23)、辅助支件(j25)、辅撑弹片(g22)、弹韧垫(h24)、衔接块(k26),所述对接件(d21)上贴合有弹韧垫(h24),所述弹韧垫(h24)与辅撑弹片(g22)相接,所述辅撑弹片(g22)与衔接块(k26)相连接,所述衔接块(k26)与推杆(f23)吻合连接,所述推杆(f23)设在对接件(d21)上,所述推杆(f23)上设有辅助支件(j25),所述辅助支件(j25)与辅撑弹片(g22)相接,所述对接件(d21)与摆动块(x34)、叠压件(k31)相接,所述对接件(d21)下端与接头(c35)相连。
5.根据权利要求2所述的一种单臂五轴伺服机械手,其特征在于:两个所述承托组件(p16)通过接板(r11)连接构成“(”形结构。
6.根据权利要求4所述的一种单臂五轴伺服机械手,其特征在于:所述对接件(d21)下端呈波浪状结构与叠压件(k31)吻合连接。
技术总结
本技术公开了一种单臂五轴伺服机械手,其结构包括底板、固定座、液压杆、调节架、机械手、夹持装置,本技术在进行使用时,两根安装杆之间设有伸缩拉件,两根安装杆在伸缩拉件的作用下可以跟随着加工物件的大小进行调整,在通过连接插件带动夹持组件在定位杆上进行移动调整,使得两个夹持组件可以有效对加工物件进行夹持包裹,通过机械手在调节架上进行调整活动,有效对加工物件进行移动加工。
技术研发人员:尹海洁,尹永乐,廖忠锦
受保护的技术使用者:厦门迪维斯科技有限责任公司
技术研发日:20230224
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!