一种夹持可靠的机械加工用夹爪的制作方法
本技术涉及机械加工,具体为一种夹持可靠的机械加工用夹爪。
背景技术:
1、在工业现代化的过程中,夹爪是一种能够自动化位置控制、重新组合程序而波动的多功能机器,在各种环境中,为了完成任务,可以使用多个自由度来搬运物体,工业夹爪是在近似自动控制领域出现的新技术,已经成为现代制造生产系统的重要组成部分,夹爪广泛用于半导体制作、工业、医疗、军事和宇宙探索等领域。可以接受命令,精确地放置在三维(或二维)空间中的一点上,以便工作,有多种用途,广泛应用于国民生产各行业。
2、现有的夹爪结构固定,普通的平板夹往往只能够方便对具有平面结构的物体进行抓取,而对圆柱形物体就需要施加较大的力才能夹取,很容易造成物体损坏且不易夹取,而弧形夹爪抓取矩形物体同样不方便,所以常规的做法是不同的物体用不同的机械爪,这样就容易浪费时间,影响工作效率。因此,我们提出一种夹持可靠的机械加工用夹爪。
技术实现思路
1、本实用新型的目的在于提供一种夹持可靠的机械加工用夹爪,本实用新型结构简单,操作方便,可实现对不同形状的物体进行夹取,且夹取稳定,具有多功能性,提高了夹爪整体的实用性解决了背景技术中所提出的问题。
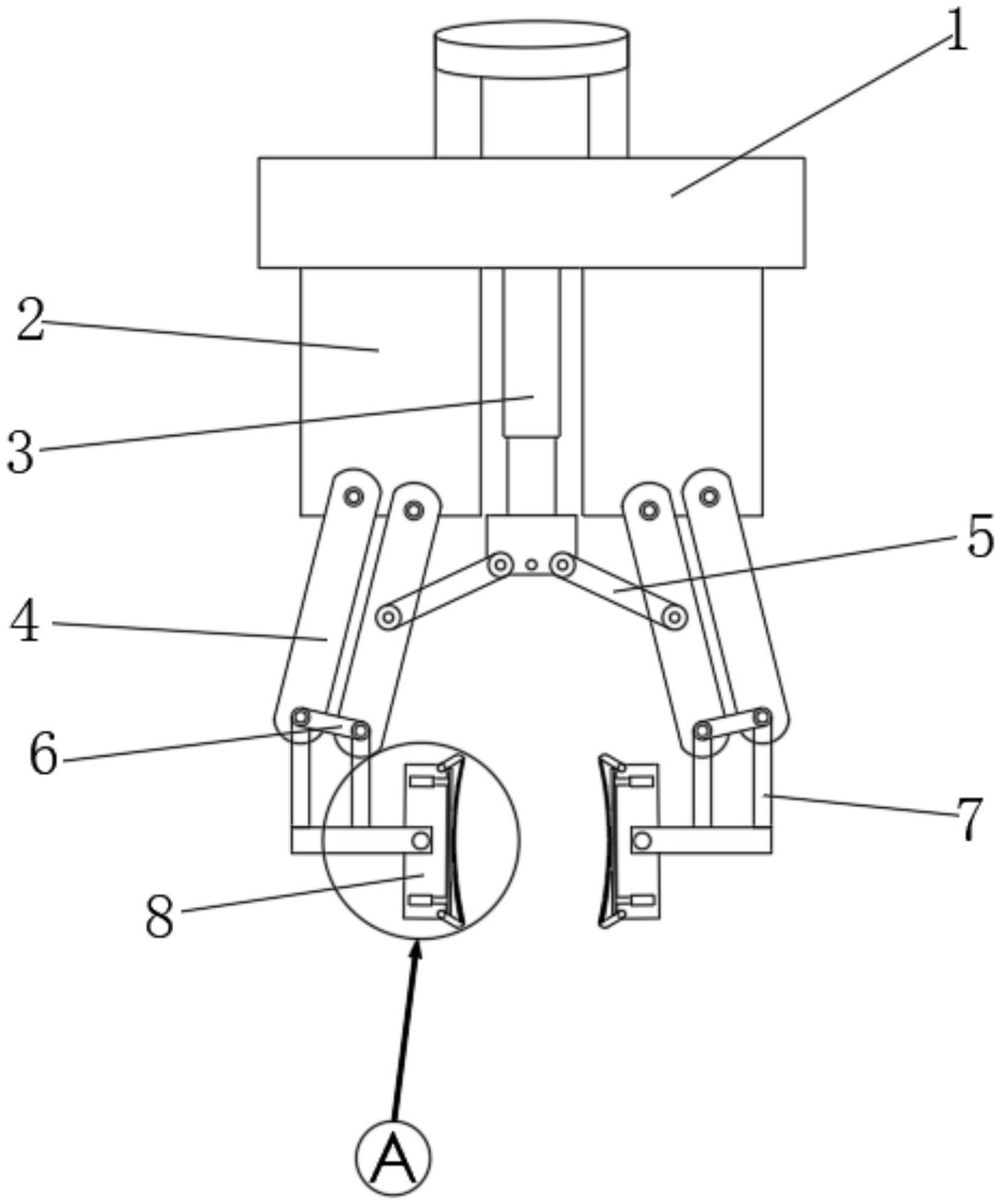
2、为实现上述目的,本实用新型提供如下技术方案:一种夹持可靠的机械加工用夹爪,包括连接杆,所述连接杆底部连接有连接架和伸缩杆,所述连接架上设有多个第一驱动杆,所述伸缩杆底部设有第二驱动杆,所述多个第一驱动杆一端与连接架铰接,所述多个第一驱动杆的另一端通过固定片固定连接,所述多个第一驱动杆的底部通过固定架连接有支撑组件,所述支撑组件固定有夹持组件,所述夹持组件包括橡胶垫、夹持块、和压板,所述夹持组件的两端均设有固定块,所述夹持组件内部设有电动液压缸。
3、作为本实用新型的一种优选实施方式,所述夹持组件内的电动液压缸均匀对称排列在夹持组件内部两侧,所述电动液压缸的一端固定连接与压板。
4、作为本实用新型的一种优选实施方式,所述第二驱动杆的一端与伸缩杆铰接,所述第二驱动杆的另一端与第一驱动杆铰接。
5、作为本实用新型的一种优选实施方式,所述夹持组件上的橡胶垫通过夹持组件两端的固定块固定连接。
6、作为本实用新型的一种优选实施方式,所述橡胶垫为弧形结构,且橡胶垫和压板之间设有一定距离。
7、与现有技术相比,本实用新型的有益效果如下:
8、本实用新型的一种夹持可靠的机械加工用夹爪,通过设置驱动组件,可对不同方位的物体进行夹持,通过设置夹持组件两端的固定块,可对圆柱形物体进行夹取,通过设置电动液压缸,来推动压板,可夹取柱形物体,且通过橡胶垫可以增加对物体的摩擦力,本新型夹爪结构方便,操作简单,可实现对不同形状的物体进行夹持,且夹取稳定,具有多功能性,提高了夹爪整体的实用性。
技术特征:
1.一种夹持可靠的机械加工用夹爪,包括连接杆(1),其特征在于:所述连接杆(1)底部连接有连接架(2)和伸缩杆(3),所述连接架(2)上设有多个第一驱动杆(4),所述伸缩杆(3)底部设有第二驱动杆(5),所述多个第一驱动杆(4)一端与连接架(2)铰接,所述多个第一驱动杆(4)的另一端通过固定片(6)固定连接,所述多个第一驱动杆(4)的底部通过固定片(6)连接有支撑组件(7),所述支撑组件(7)固定有夹持组件(8),所述夹持组件包括橡胶垫(9)、夹持块(10)、和压板(11),所述夹持组件(8)的两端均设有固定块(12),所述夹持组件(8)内部设有电动液压缸(13)。
2.根据权利要求1所述的一种夹持可靠的机械加工用夹爪,其特征在于:所述夹持组件(8)内的电动液压缸(13)均匀对称排列在夹持组件(8)内部两侧,所述电动液压缸(13)的一端固定连接与压板(11)。
3.根据权利要求1所述的一种夹持可靠的机械加工用夹爪,其特征在于:所述第二驱动杆(5)的一端与伸缩杆(3)铰接,所述第二驱动杆(5)的另一端与第一驱动杆(4)铰接。
4.根据权利要求1所述的一种夹持可靠的机械加工用夹爪,其特征在于:所述夹持组件(8)上的橡胶垫(9)通过夹持组件(8)两端的固定块(12)固定连接。
5.根据权利要求1所述的一种夹持可靠的机械加工用夹爪,其特征在于:所述橡胶垫(9)为弧形结构,且橡胶垫和压板(11)之间设有一定距离。
技术总结
本技术涉及机械加工技术领域,公开了一种夹持可靠的机械加工用夹爪,包括连接杆,所述连接杆底部连接有连接架和伸缩杆,所述连接架上设有多个第一驱动杆,所述伸缩杆底部设有第二驱动杆,所述多个第一驱动杆一端与连接架铰接,所述多个第一驱动杆的另一端通过固定片固定连接。通过设置驱动组件,可对不同方位的物体进行夹持,通过设置夹持组件两端的固定块,可对圆柱形物体进行夹取,通过设置电动液压缸,来推动压板,可夹取柱形物体,且通过橡胶垫可以增加对物体的摩擦力,本新型夹爪结构方便,操作简单,可实现对不同形状的物体进行夹持,且夹取稳定,具有多功能性,提高了夹爪整体的实用性。
技术研发人员:王元明,詹宗俊,吴永良
受保护的技术使用者:嘉兴尚工精密机械有限公司
技术研发日:20230316
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!