一种机器人头部转动装置的制作方法
本技术涉及机器人,具体为一种机器人头部转动装置。
背景技术:
1、随着社会的发展,对机器人的应用愈加广泛,机器人是一种能够半自主或全自主工作的智能机器,机器人能够通过编程和自动控制来执行诸如作业或移动等任务,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
2、现有技术中,对于机器人头部在转动处理时仅仅能够进行单一水平角度转动,难以进行多角度调节,从而在机器人移动过程中在具有障碍物的情况下由于视野有限的情况容易使机器人产生碰撞;且在机器人的头部在进行安装时通常采用多个连接件的方式进行固定安装,并需要对头部控制线缆进行提前焊接,进而在机器人头部需要进行检修时难以进行快速拆装,不利于机器人的头部检修使用。
技术实现思路
1、本实用新型的目的在于提供一种机器人头部转动装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
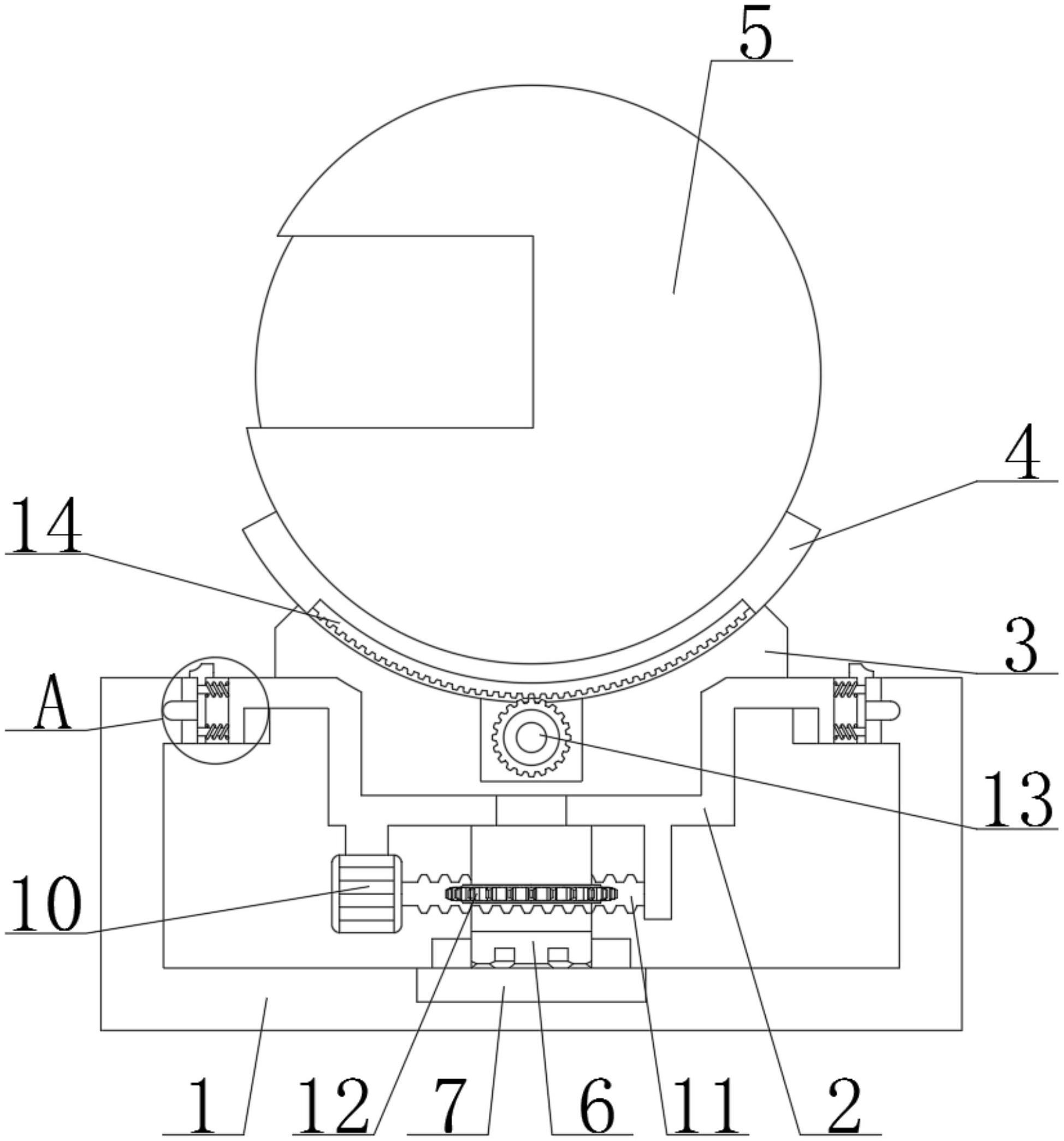
3、一种机器人头部转动装置,包括身体、安装座板和头部主体,所述身体的上端滑动连接有安装座板,所述安装座板的上端内侧转动连接有转动颈座,所述转动颈座的内侧滑动连接有限位卡条,所述限位卡条的上端固定连接有头部主体,所述转动颈座的下端固定连接有接电端头,所述接电端头的下端电性连接有控制电路板,所述控制电路板与身体之间固定连接。
4、优选的,所述安装座板的外端内侧滑动连接有滑板,所述滑板的外端固定连接有卡扣,所述卡扣与安装座板之间滑动连接,所述卡扣与身体之间滑动连接。
5、优选的,所述安装座板的下端左侧固定连接有电机,所述电机的输出轴右端固定连接有蜗杆,所述蜗杆与安装座板之间主动连接,所述蜗杆的前端啮合连接有蜗轮,所述蜗轮与转动颈座之间固定连接。
6、优选的,所述转动颈座的上端内侧转动连接有传动齿轮,所述传动齿轮的上端啮合连接有从动齿条,所述从动齿条与限位卡条之间固定连接。
7、优选的,所述安装座板的外端内侧固定连接有固定杆,所述固定杆与滑板之间滑动连接,所述固定杆的表面外覆有弹簧。
8、优选的,所述传动齿轮的后端设有驱动马达,所述驱动马达与转动颈座之间固定连接。
9、优选的,所述控制电路板的上端固定连接有圆形电极接头。
10、优选的,所述身体的上端内侧开设有限位卡槽,所述限位卡槽的位置大小与卡扣的位置大小相对应。
11、与现有技术相比,本实用新型的有益效果是:
12、1、本实用新型中,通过设置的限位卡条、蜗杆和传动齿轮,利用限位卡条的作用能够将头部主体限位灵活的安装在转动颈座上端,并通过对蜗杆的转动使蜗轮能够带动转动颈座进行转动,从而使头部主体能够进行水平方向的转动,同时通过对传动齿轮的转动使从动齿条能够带动头部主体进行纵向倾斜角度调整,以提升机器人头部的转动角度,使机器人头部能够仰视或俯视,提升机器人头部的转动视野;
13、2、本实用新型中,通过设置的接电端头、卡扣和弹簧,利用接电端头的作用使安装座板安装在身体上端后能够进行及时供电,又不会对头部主体的转动造成影响,同时通过卡扣的作用能够对安装座板进行限位固定,并通过设置的弹簧能够对滑板进行弹性顶撑,从而使头部主体能够进行快速拆装,以便于进行维护检修,提升对机器人头部的拆装便捷性。
技术特征:
1.一种机器人头部转动装置,包括身体(1)、安装座板(2)和头部主体(5),其特征在于:所述身体(1)的上端滑动连接有安装座板(2),所述安装座板(2)的上端内侧转动连接有转动颈座(3),所述转动颈座(3)的内侧滑动连接有限位卡条(4),所述限位卡条(4)的上端固定连接有头部主体(5),所述转动颈座(3)的下端固定连接有接电端头(6),所述接电端头(6)的下端电性连接有控制电路板(7),所述控制电路板(7)与身体(1)之间固定连接。
2.根据权利要求1所述的一种机器人头部转动装置,其特征在于:所述安装座板(2)的外端内侧滑动连接有滑板(8),所述滑板(8)的外端固定连接有卡扣(9),所述卡扣(9)与安装座板(2)之间滑动连接,所述卡扣(9)与身体(1)之间滑动连接。
3.根据权利要求1所述的一种机器人头部转动装置,其特征在于:所述安装座板(2)的下端左侧固定连接有电机(10),所述电机(10)的输出轴右端固定连接有蜗杆(11),所述蜗杆(11)与安装座板(2)之间主动连接,所述蜗杆(11)的前端啮合连接有蜗轮(12),所述蜗轮(12)与转动颈座(3)之间固定连接。
4.根据权利要求1所述的一种机器人头部转动装置,其特征在于:所述转动颈座(3)的上端内侧转动连接有传动齿轮(13),所述传动齿轮(13)的上端啮合连接有从动齿条(14),所述从动齿条(14)与限位卡条(4)之间固定连接。
5.根据权利要求2所述的一种机器人头部转动装置,其特征在于:所述安装座板(2)的外端内侧固定连接有固定杆(15),所述固定杆(15)与滑板(8)之间滑动连接,所述固定杆(15)的表面外覆有弹簧(16)。
6.根据权利要求4所述的一种机器人头部转动装置,其特征在于:所述传动齿轮(13)的后端设有驱动马达,所述驱动马达与转动颈座(3)之间固定连接。
7.根据权利要求1所述的一种机器人头部转动装置,其特征在于:所述控制电路板(7)的上端固定连接有圆形电极接头。
8.根据权利要求1所述的一种机器人头部转动装置,其特征在于:所述身体(1)的上端内侧开设有限位卡槽,所述限位卡槽的位置大小与卡扣(9)的位置大小相对应。
技术总结
本技术涉及机器人技术领域,尤其为一种机器人头部转动装置,包括身体、安装座板和头部主体,所述身体的上端滑动连接有安装座板,所述安装座板的上端内侧转动连接有转动颈座,所述转动颈座的内侧滑动连接有限位卡条,所述限位卡条的上端固定连接有头部主体,本技术中,通过设置的限位卡条、蜗杆和传动齿轮,利用限位卡条的作用能够将头部主体限位灵活的安装在转动颈座上端,并通过对蜗杆的转动使蜗轮能够带动转动颈座进行转动,从而使头部主体能够进行水平方向的转动,同时通过对传动齿轮的转动使从动齿条能够带动头部主体进行纵向倾斜角度调整,以提升机器人头部的转动角度,使机器人头部能够仰视或俯视,提升机器人头部的转动视野。
技术研发人员:宋育刚
受保护的技术使用者:苏州穿山甲机器人股份有限公司
技术研发日:20230320
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!