一种固危废自动化验坩埚转移机器人的爪夹结构的制作方法
本技术属于固危废自动化验,尤其涉及一种固危废自动化验坩埚转移机器人的爪夹结构。
背景技术:
1、固危废自动化验使用的离子色谱仪是最常用的元素含量分析测定仪器。高温燃烧离子色谱分析仪在进行样品化验时,需要样品发生高温燃烧水解过程的反应,坩埚在高温下使用的过程中极容易存在变形的问题,极易导致机器人夹爪原本的4个夹持点变为了2个夹持点,使夹爪无法提供足够的夹持力,在机械手运动时,容易使坩埚出现歪斜的情况,当坩埚歪斜后,坩埚中的样品会洒落,导致无法进行检测,还会导致机器人碰撞检测设备中的其他部分,造成设备故障。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种固危废自动化验坩埚转移机器人的爪夹结构,可对坩埚提供足够的夹持力,避免了坩埚出现歪斜,导致样品洒落,以及机器人碰撞检测设备中的其他部分,造成设备故障的问题。
2、为了达到上述目的,本实用新型的技术方案是:
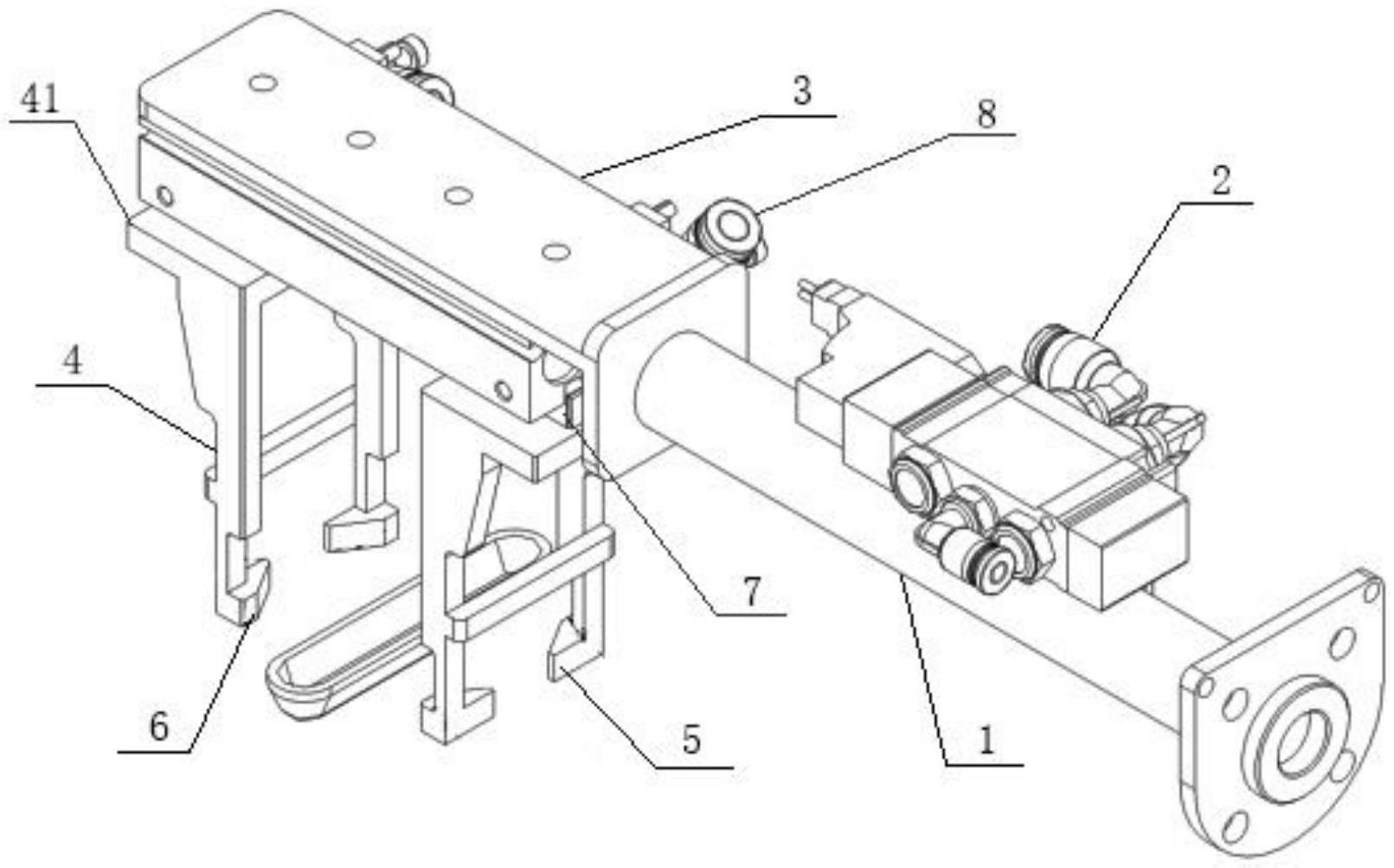
3、一种固危废自动化验坩埚转移机器人的爪夹结构,包括夹持座,所述夹持座上设有电磁阀,其一端还连接有气缸座,所述气缸座的两端相对设有夹爪驱动气缸,所述夹爪驱动气缸的传动轴上均连接有夹爪连接块,所述夹爪连接块底部均固定连接有夹爪,两个所述夹爪在夹爪驱动气缸的驱动作用下可相对移动;每个所述夹爪均设有两个夹持点,一个夹爪的两个夹持点与另一个夹爪的两个夹持点两两相对,四个所述夹持点的相对面上均设有软性材料。
4、上述的一种固危废自动化验坩埚转移机器人的爪夹结构,所述软性材料包括橡胶。
5、上述的一种固危废自动化验坩埚转移机器人的爪夹结构,所述夹爪的顶部设有平板,所述平板通过连接件固定连接夹爪连接块底部。
6、上述的一种固危废自动化验坩埚转移机器人的爪夹结构,四个所述夹持点的相对面上还滚压有滚花或加工有沟槽,用于增加夹持面粗糙度,提高夹爪的夹持力。
7、本实用新型的技术效果和优点:
8、1、本实用新型提供的一种固危废自动化验坩埚转移机器人的爪夹结构,通过在夹爪的四个夹持点上均设置软性材料,当坩埚出现变形导致的宽度不一致时,通过软性材料的变形可补偿坩埚宽度不一致的情况,从而保证夹爪的4个夹持点均起到夹持作用,可有效地的提高夹爪的夹持力,可有效避免坩埚出现歪斜,导致样品洒落,以及机器人碰撞检测设备中的其他部分,造成设备故障的问题。
9、2、本实用新型提供的一种固危废自动化验坩埚转移机器人的爪夹结构,通过在夹爪的四个夹持点上均滚压滚花或加工沟槽,可加大夹持面的粗糙度,有效地提高了夹持点与坩埚的摩擦力,从而保证了夹爪提供足够的加持力,避免坩埚出现歪斜。
技术特征:
1.一种固危废自动化验坩埚转移机器人的爪夹结构,其特征在于:包括夹持座(1),所述夹持座(1)上设有电磁阀(2),其一端还连接有气缸座(3),所述气缸座(3)的两端相对设有夹爪驱动气缸(8),所述夹爪驱动气缸(8)分别通过pu管与电磁阀(2)连通;
2.根据权利要求1所述的一种固危废自动化验坩埚转移机器人的爪夹结构,其特征在于:所述软性材料(6)包括橡胶。
3.根据权利要求1所述的一种固危废自动化验坩埚转移机器人的爪夹结构,其特征在于:所述夹爪(4)的顶部设有连接平板(41),所述连接平板(41)通过连接件固定连接夹爪连接块(7)底部。
4.根据权利要求1所述的一种固危废自动化验坩埚转移机器人的爪夹结构,其特征在于:四个所述夹持点(5)的相对面上还滚压有滚花或加工有沟槽,用于增加夹持面粗糙度,提高夹爪(4)的夹持力。
技术总结
本技术涉及一种固危废自动化验坩埚转移机器人的爪夹结构,包括夹持座,所述夹持座上设有电磁阀,其一端还连接有气缸座,所述气缸座的两端相对设有夹爪驱动气缸,所述夹爪驱动气缸的传动轴上均连接有夹爪连接块,所述夹爪连接块底部均固定连接有夹爪,两个所述夹爪在夹爪驱动气缸的驱动作用下可相对移动;每个所述夹爪均设有两个夹持点,一个夹爪的两个夹持点与另一个夹爪的两个夹持点两两相对,四个所述夹持点的相对面上均设有软性材料。本技术可对坩埚提供足够的夹持力,避免了坩埚出现歪斜,导致样品洒落,以及机器人碰撞检测设备中的其他部分。
技术研发人员:赵俊辉,冯浩,王小云,秦洁,雷巍,马辛泉
受保护的技术使用者:冀东水泥铜川有限公司
技术研发日:20230410
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!