并联机器人的制作方法
本技术涉及机器人,尤其是涉及一种并联机器人。
背景技术:
1、目前,随着工业机器人在各个领域的广泛推广与工业机器人制造企业的不断努力,工业机器人在食品、药品、3c电子及航空航天等有高标准要求的科技领域均获得越来越多的认同与应用。并联机器人在工业机器人中具有刚度高、速度快、柔性强、重量轻等特点。
2、目前市场常见的两轴并联机器人包括动平台、定平台和两个独立的运动链,动平台和定平台通过两个独立的运动链相连接,使得两轴并联机器人仅能完成空间xy平面两自由度的抓放,缺乏在xy平面内绕z轴转动的自由度,运动方式单一。因此为了使两轴并联机器人能存在绕z轴转动的自由度,通常在两轴并联机器人的动平台上加装翻转气缸或电机驱动来实现。
3、本申请人发现现有技术至少存在以下技术问题:
4、在现有技术中,两轴并联机器人的动平台上加装翻转气缸或电机,会对动平台的最大负载产生影响,从而造成运动链支撑的负载过大,使得运动链容易损坏,降低了两轴并联机器人的使用寿命;同时,在一些高速场合因动平台自重过大而产生不可控的影响。
技术实现思路
1、本实用新型的目的在于提供并联机器人,以解决现有技术中存在的两轴并联机器人的动平台上加装翻转气缸或电机,会对动平台的最大负载产生影响的技术问题。本实用新型提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果详见下文阐述。
2、为实现上述目的,本实用新型提供了以下技术方案:
3、本实用新型提供的一种并联机器人,包括动平台、定平台、第一运动链、第二运动链、第三运动链、第一驱动器、第二驱动器和第三驱动器,其中,所述第一驱动器、所述第二驱动器和所述第三驱动器均安装在所述定平台上,所述第一运动链的一端与所述第一驱动器的输出轴相连接,所述第二运动链的一端与所述第二驱动器的输出轴相连接,所述第三运动链的一端与所述第三驱动器的输出轴相连接,所述第三运动链的自由端和所述动平台通过连接轴相连接,所述第一运动链的自由端和所述第二运动链的自由端均与所述连接轴通过轴承相连接,所述第一运动链和所述第二运动链分别位于所述动平台的两侧;
4、所述第三运动链包括主动板、第一从动板、转向板、第二从动板、第一连杆、第二连杆和第三连杆,所述主动板的一端与所述第三驱动器的输出轴相连接,所述第一从动板的一端与所述第一驱动器的输出轴通过轴承相连接,所述主动板的另一端与所述第一连杆的一端通过第一轴销相连接,所述第一从动板的另一端、所述第一连杆的另一端和所述第二连杆的一端通过第二轴销相连接,所述第二连杆的另一端与所述转向板的一端通过第三轴销相连接,所述第三连杆的一端与所述转向板的另一端通过第四轴销相连接,所述转向板的中部与所述转动轴通过轴承相连接,所述第三连杆的另一端与所述第二从动板的一端通过第五轴销相连接,所述第二从动板的另一端与所述连接轴相连接。
5、可选地,所述第一运动链和所述第二运动链均包括主动臂和从动臂,所述主动臂的一端套在所述第一驱动器或所述第二驱动器的输出轴上且所述主动臂与所述第一驱动器或所述第二驱动器的输出轴相连接,所述主动臂的另一端与所述从动臂的一端通过转动轴转动连接,所述从动臂的另一端套在所述连接轴上且所述从动臂与所述连接轴通过轴承相连接。
6、可选地,所述主动臂的一端设置有连接套,所述连接套与所述第一驱动器或所述第二驱动器的输出轴相连接;
7、所述主动臂的另一端设置有凹陷槽和第一通孔,所述从动臂的一端设置有第二通孔,所述从动臂的一端能伸入到所述凹陷槽内且所述第一通孔和所述第二通孔通过所述转动轴转动连接。
8、可选地,所述从动臂的另一端为u型架,所述u型架套在所述连接轴上且所述u型架与所述连接轴通过轴承相连接,所述动平台的连接端位于所述u型架内。
9、可选地,所述第一连杆、所述第二连杆和所述第三连杆的两端均设置有第一配合孔。
10、可选地,所述转向板的两端均设置有第二配合孔,所述转向板的中部设置有转动孔,两个所述第二配合孔以所述转动孔的中心线为对称线且对称分布。
11、可选地,所述第一驱动器和所述第二驱动器分别位于所述第三驱动器的两侧。
12、本实用新型提供的一种并联机器人,通过将第三驱动器安装在定平台上,再通过第三运动链使得第三驱动器与动平台相连接,故在第三驱动器启动后,从而就会驱动第三运动链运动,而第三运动链的运动就会实现动平台做翻转运动,第一运动链和第二运动链会推动动平台做来回移动,故本实用新型中第三驱动器没有安装在动平台上,也就使得的第三驱动器不会影响到动平台的最大负载,从而也就不会降低并联机器人的使用寿命,解决了现有技术中存在的两轴并联机器人的动平台上加装翻转气缸或电机,会对动平台的最大负载产生影响的技术问题。
技术特征:
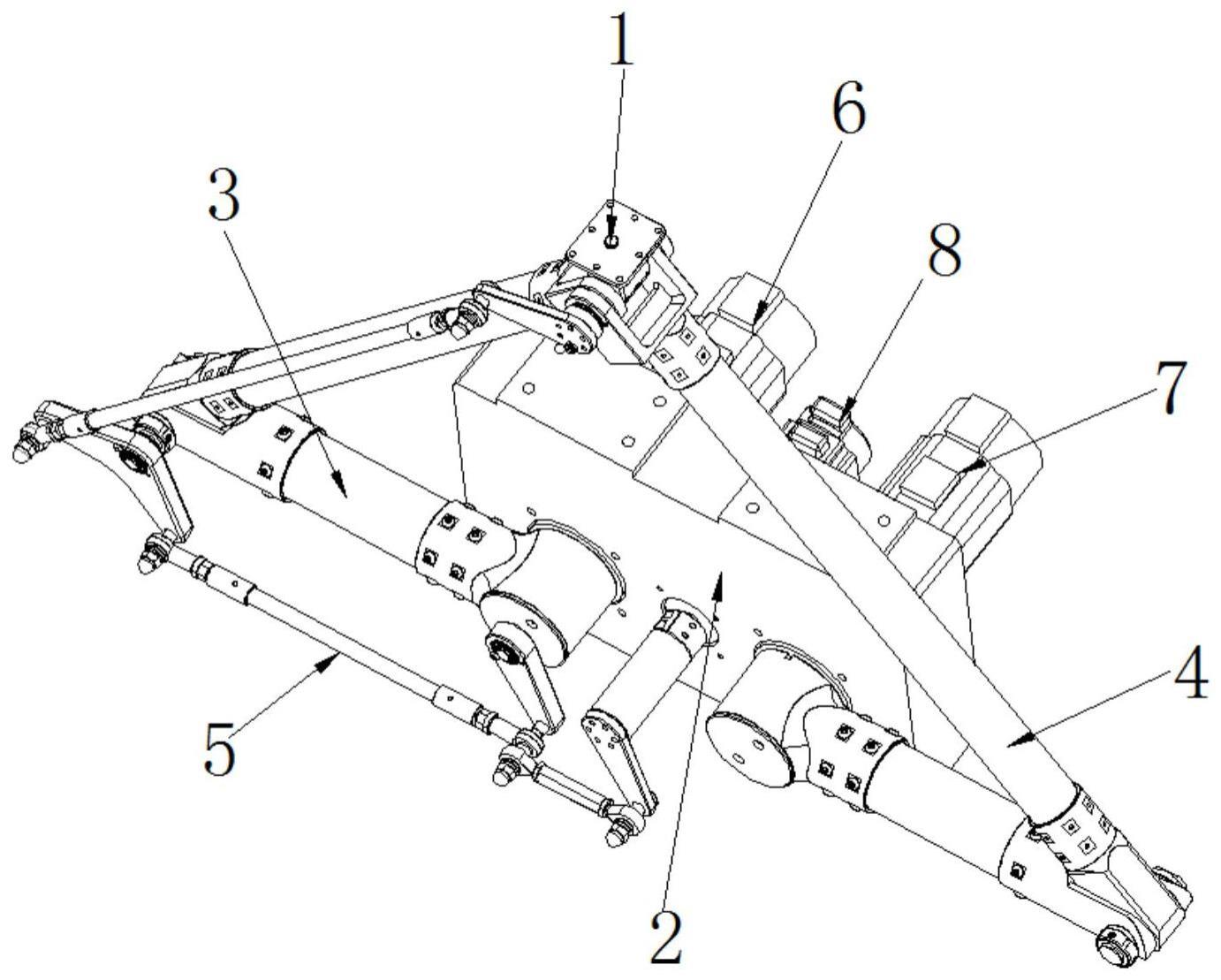
1.一种并联机器人,其特征在于,包括动平台(1)、定平台(2)、第一运动链(3)、第二运动链(4)、第三运动链(5)、第一驱动器(6)、第二驱动器(7)和第三驱动器(8),其中,
2.根据权利要求1所述的并联机器人,其特征在于,所述第一运动链(3)和所述第二运动链(4)均包括主动臂(31)和从动臂(32),所述主动臂(31)的一端套在所述第一驱动器(6)或所述第二驱动器(7)的输出轴上且所述主动臂(31)与所述第一驱动器(6)或所述第二驱动器(7)的输出轴相连接,所述主动臂(31)的另一端与所述从动臂(32)的一端通过转动轴(10)转动连接,所述从动臂(32)的另一端套在所述连接轴(9)上且所述从动臂(32)与所述连接轴(9)通过轴承相连接。
3.根据权利要求2所述的并联机器人,其特征在于,所述主动臂(31)的一端设置有连接套(311),所述连接套(311)与所述第一驱动器(6)或所述第二驱动器(7)的输出轴相连接;
4.根据权利要求2所述的并联机器人,其特征在于,所述从动臂(32)的另一端为u型架(322),所述u型架(322)套在所述连接轴(9)上且所述u型架(322)与所述连接轴(9)通过轴承相连接,所述动平台(1)的连接端位于所述u型架(322)内。
5.根据权利要求1所述的并联机器人,其特征在于,所述第一连杆(55)、所述第二连杆(56)和所述第三连杆(57)的两端均设置有第一配合孔(551)。
6.根据权利要求1所述的并联机器人,其特征在于,所述转向板(53)的两端均设置有第二配合孔(531),所述转向板(53)的中部设置有转动孔(532),两个所述第二配合孔(531)以所述转动孔(532)的中心线为对称线且对称分布。
7.根据权利要求1所述的并联机器人,其特征在于,所述第一驱动器(6)和所述第二驱动器(7)分别位于所述第三驱动器(8)的两侧。
技术总结
本技术提供了一种并联机器人,涉及机器人技术领域,解决了现有技术中存在的两轴并联机器人的动平台上加装翻转气缸或电机,会对动平台的最大负载产生影响的技术问题。该装置包括动平台、定平台、第一运动链、第二运动链、第三运动链、第一驱动器、第二驱动器和第三驱动器,第一驱动器、第二驱动器和第三驱动器均安装在定平台上,第一运动链的一端与第一驱动器的输出轴相连接,第二运动链的一端与第二驱动器的输出轴相连接,第三运动链的一端与第三驱动器的输出轴相连接,第三运动链的自由端和动平台通过连接轴相连接,第一运动链的自由端和第二运动链的自由端均与连接轴通过轴承相连接,第一运动链和第二运动链分别位于动平台的两侧。
技术研发人员:李星渊,李东岳,刘松涛
受保护的技术使用者:辰星(天津)自动化设备有限公司
技术研发日:20230427
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!