一种伺服模组、关节及机器人的制作方法
本技术涉及机器人领域,尤其涉及一种伺服模组、关节及机器人。
背景技术:
1、根据是否单独驱动,机器人的关节可以分为主动关节和从动关节。在主动关节中,伺服模组作为执行器件,是机器人的核心零部件。
2、现有的机器人关节所使用的伺服模组一般为谐波伺服模组,其减速比高且力矩大,但无法通过驱动器的电流直接观测或估算力矩,在需要力控的场合必须安装力矩传感器,存在结构复杂、体积大的缺陷,不符合机器人追求轻量化和小体积化的需求。
技术实现思路
1、为了解决现有技术中存在的问题,本实用新型的目的之一是提供一种伺服模组。
2、本实用新型提供如下技术方案:
3、一种伺服模组,包括:
4、电机,包括机壳、端盖、定子和转子,所述机壳具有环形的外壳部和内壳部,所述内壳部的内壁沿周向设有多个齿,所述端盖与所述外壳部连接,所述定子环绕所述内壳部设置且与所述内壳部固定连接,所述转子可转动地设置在所述定子与所述外壳部之间;
5、行星减速组件,包括行星架、行星轮和太阳轮,所述行星架与所述内壳部的内壁转动配合,所述行星轮转动设置于所述行星架且与所述内壳部上的所述齿啮合,所述太阳轮与所述行星轮啮合且与所述转子连接;及
6、伺服驱动器,设置于所述端盖朝向所述机壳的一侧,所述伺服驱动器与所述端盖连接且与所述定子电连接。
7、作为对所述伺服模组的进一步可选的方案,所述端盖为导热材质,所述伺服驱动器与所述端盖之间设有导热件,所述伺服驱动器通过所述导热件与所述端盖相抵。
8、作为对所述伺服模组的进一步可选的方案,所述端盖具有凸起部,所述凸起部内形成容纳腔,所述伺服驱动器位于所述容纳腔内。
9、作为对所述伺服模组的进一步可选的方案,所述伺服驱动器包括板卡和控制模块,所述板卡与所述端盖连接,所述控制模块设置于所述板卡,所述控制模块与所述定子电连接,以采集所述定子的电流信号。
10、作为对所述伺服模组的进一步可选的方案,所述伺服驱动器还包括编码解码模块,所述编码解码模块与所述控制模块电连接,所述编码解码模块设置于所述板卡朝向所述太阳轮的一侧且与所述太阳轮正对,所述太阳轮靠近所述编码解码模块的一端对应设有磁石。
11、作为对所述伺服模组的进一步可选的方案,所述内壳部的内壁设有第一轴承和第二轴承,所述第一轴承和所述第二轴承沿所述内壳部的轴向排列,所述行星架通过所述第一轴承和所述第二轴承与所述内壳部的内壁转动配合。
12、作为对所述伺服模组的进一步可选的方案,所述电机还包括转子架,所述转子架与所述转子连接,所述转子架具有套筒部,所述套筒部套设于所述太阳轮的一端且与所述太阳轮连接。
13、作为对所述伺服模组的进一步可选的方案,所述太阳轮远离所述套筒部的一端与所述行星架之间设有第三轴承,所述套筒部与所述行星架之间设有第四轴承。
14、本实用新型的另一目的是提供一种关节。
15、本实用新型提供如下技术方案:
16、一种关节,包括上述伺服模组。
17、本实用新型的又一目的是提供一种机器人。
18、本实用新型提供如下技术方案:
19、一种机器人,包括上述关节。
20、本实用新型的实施例具有如下有益效果:
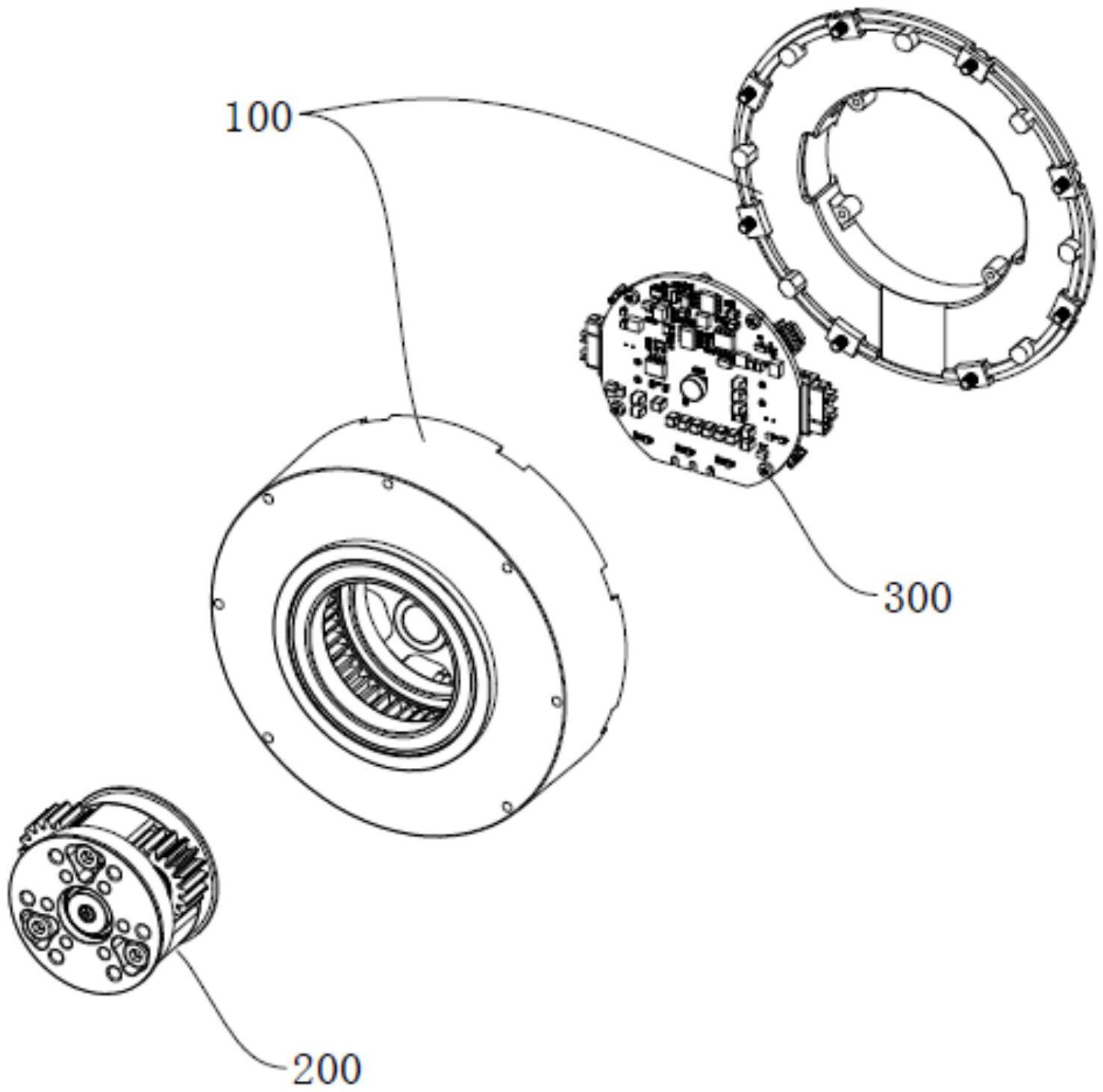
21、在上述伺服模组中,电机的机壳具有环形的外壳部和内壳部。使定子环绕内壳部设置,并将转子可转动地设置在定子与外壳部之间,既能保证电机正常运行,又能在内壳部内侧形成一可供行星减速组件嵌入安装的空间。在此基础上,行星架与内壳部的内壁转动配合,依托机壳进行安装。而行星轮与内壳部的内壁上的齿啮合,由内壳部充当齿圈。此外,伺服驱动器设置在端盖朝向机壳的一侧,利用端盖进行安装固定,从而实现了电机、行星减速组件和伺服驱动器的一体化设计,使得整个伺服模组沿径向和轴向更加紧凑,体积更小。
22、使用时,电机的转子带动太阳轮转动,太阳轮则带动相啮合的行星轮转动。在充当齿圈的内壳部固定不动的情况下,行星轮带动行星架转动,以行星架作为整个伺服模组的输出端。与现有的谐波伺服模组相比,行星减速组件的减速比更小,可以通过定子的绕组的电流较为准确地估算电机的力矩参数,因而不必设置力矩传感器,简化了伺服模组的结构,同时有利于整个伺服模组的体积缩小,能够更好地符合机器人追求轻量化和小体积化的需求。
23、为使本实用新型的上述目的、特征和优点能更明显和易懂,下文特举较佳实施例,并配合所附附图,做详细说明如下。
技术特征:
1.一种伺服模组,其特征在于,包括:
2.根据权利要求1所述的伺服模组,其特征在于,所述端盖为导热材质,所述伺服驱动器与所述端盖之间设有导热件,所述伺服驱动器通过所述导热件与所述端盖相抵。
3.根据权利要求1所述的伺服模组,其特征在于,所述端盖具有凸起部,所述凸起部内形成容纳腔,所述伺服驱动器位于所述容纳腔内。
4.根据权利要求1-3中任一项所述的伺服模组,其特征在于,所述伺服驱动器包括板卡和控制模块,所述板卡与所述端盖连接,所述控制模块设置于所述板卡,所述控制模块与所述定子电连接,以采集所述定子的电流信号。
5.根据权利要求4所述的伺服模组,其特征在于,所述伺服驱动器还包括编码解码模块,所述编码解码模块与所述控制模块电连接,所述编码解码模块设置于所述板卡朝向所述太阳轮的一侧且与所述太阳轮正对,所述太阳轮靠近所述编码解码模块的一端对应设有磁石。
6.根据权利要求1所述的伺服模组,其特征在于,所述内壳部的内壁设有第一轴承和第二轴承,所述第一轴承和所述第二轴承沿所述内壳部的轴向排列,所述行星架通过所述第一轴承和所述第二轴承与所述内壳部的内壁转动配合。
7.根据权利要求1所述的伺服模组,其特征在于,所述电机还包括转子架,所述转子架与所述转子连接,所述转子架具有套筒部,所述套筒部套设于所述太阳轮的一端且与所述太阳轮连接。
8.根据权利要求7所述的伺服模组,其特征在于,所述太阳轮远离所述套筒部的一端与所述行星架之间设有第三轴承,所述套筒部与所述行星架之间设有第四轴承。
9.一种关节,其特征在于,包括如权利要求1-8中任一项所述的伺服模组。
10.一种机器人,其特征在于,包括如权利要求9所述的关节。
技术总结
本技术提供一种伺服模组、关节及机器人,涉及机器人领域。伺服模组包括:电机,包括机壳、端盖、定子和转子,机壳具有环形的外壳部和内壳部,内壳部的内壁设有多个齿,定子环绕内壳部设置,转子设置在定子与外壳部之间;行星减速组件,包括行星架、行星轮和太阳轮,行星架与内壳部的内壁转动配合,行星轮设置于行星架且与齿啮合,太阳轮与行星轮啮合且与转子连接;及伺服驱动器,设置于端盖朝向机壳的一侧且与所述定子电连接。电机、行星减速组件和伺服驱动器的一体化设计,使得整个伺服模组更加紧凑,体积更小。通过定子的绕组的电流估算电机的力矩参数,简化了伺服模组的结构,能够更好地符合机器人追求轻量化和小体积化的需求。
技术研发人员:李汉平,杜旭超,王浩,周博,梁振楠
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:20230426
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!