一种动力吸振器的微调装置
本技术属于吸振器安装,尤其是涉及一种动力吸振器的微调装置。
背景技术:
1、柔性机械臂系统的动力特点是其柔性臂杆的小幅弹性运动会影响机械臂末端的定位精度并产生震颤,而医疗上对系统的稳定性要求更甚,通过对机械臂末端的主动抑振,不仅能减小病人在做手术时间过长带来的痛苦,还能实现对患者的精准治疗,目前柔性机械臂的抑振控制方法主要是主动控制,主动控制:需要建立被控制对象的数学模型,在此基础上运用相应的主动抑振控制算法并通过外部输入能量来抑制柔性机械臂的振动,包括数学建模法、实验辨识法等,其中数学建模法由于建模时需要忽略一些难以建模的次要项而导致模型有误差,而实验辨识法也存在难以辨识全工作空间内时变的机械臂振动模态参数的问题,这些问题都导致了机械臂的振动抑制目前难以达到十分理想的效果。
2、目前,通过安装吸振器来抑制机械臂的振动,安装前,需要计算机械臂重心,通过螺钉将吸振器安装在机械臂的重心处,在安装过程中,因部分操作或计算误差等会影响吸振器与机械臂的重心偏移,需要将吸振器拆卸调整后再次安装,增加工作人员的工作强度。
技术实现思路
1、根据以上现有技术中的不足,本实用新型要解决的技术问题是:提供一种动力吸振器的微调装置,其结构灵活,微调吸振器位置,使吸振器与机械臂重心重合。
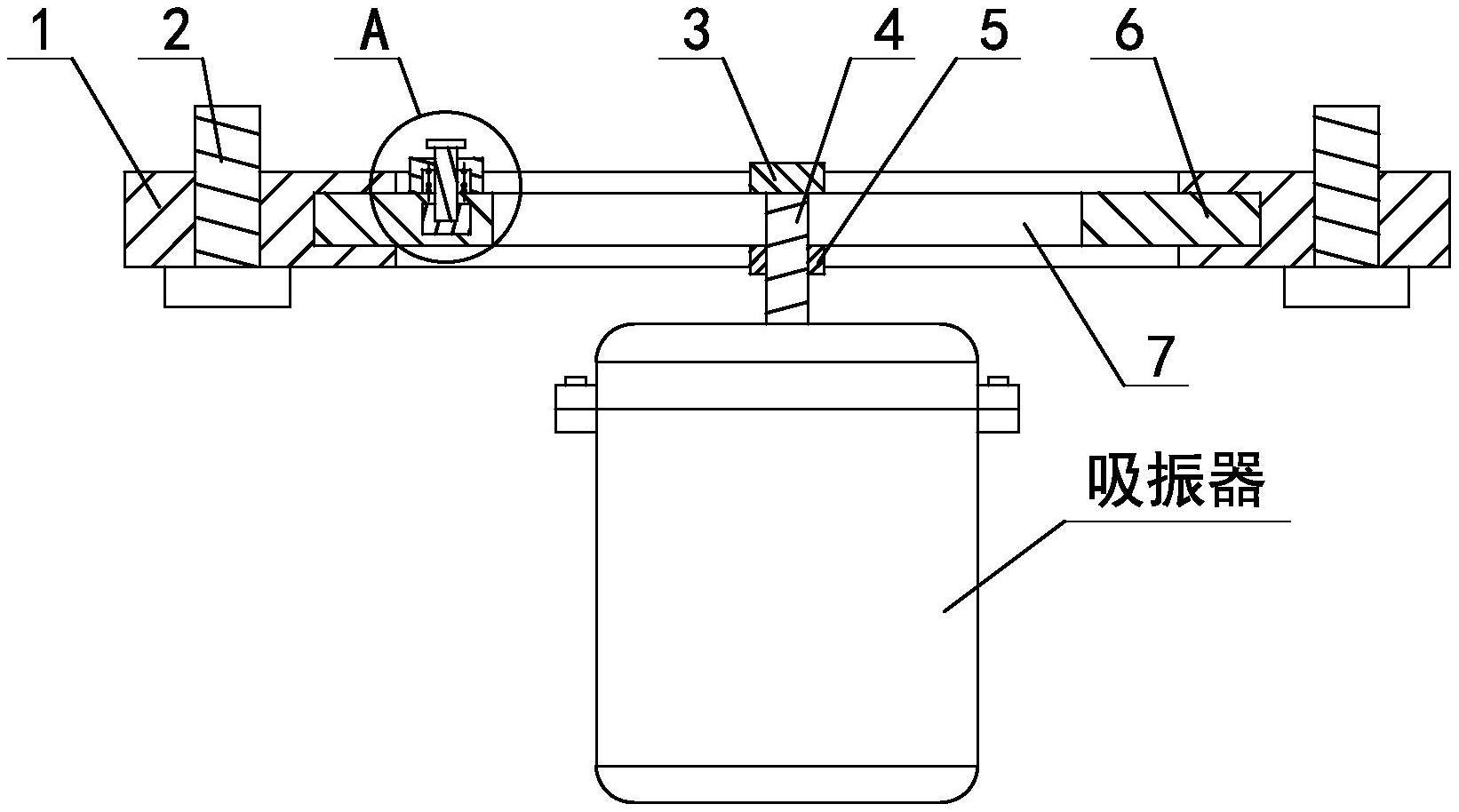
2、所述的动力吸振器的微调装置,包括水平设置的安装板,安装板上安装有螺钉,所述安装板上开设有上下相通的通槽,通槽内水平设置有与之呈前后滑动配合的活动板,安装板上设置有用于调节活动板位置的调节组件,活动板上开设有上下相通的滑槽,滑槽内独立竖直穿装有螺杆,螺杆底部固定有吸振器,螺杆上安装有用于锁定螺杆位置的锁定组件。
3、进一步的,所述调节组件包括调节板,活动板上开设有前后相通的限位槽,调节板独立穿装在限位槽中,调节板的两端穿出限位槽后固定在通槽侧壁上,沿调节板的长度方向在调节板顶部等间距开设有若干个锁定孔,活动板顶部设置有支架,支架呈开口朝下的“u”字形结构,支架上竖直穿装有滑杆,支架内的滑杆上套装有拉簧,拉簧自然状态下,滑杆的底部穿入活动板后插入锁定孔中。
4、进一步的,所述锁定组件包括螺母,螺杆的上端穿出滑槽后固定有挡板,螺母套装在活动板下方的螺杆上,滑槽的槽宽小于挡板与螺母的直径。
5、进一步的,所述通槽的左右槽壁上开设有导向槽,活动板的两端分别插入对应的导向槽中。
6、进一步的,所述安装板四个顶角处开设有上下相通的螺纹孔,螺纹孔内均穿装有与之呈螺纹配合的螺钉。
7、与现有技术相比,本实用新型具有以下有益效果:
8、本实用新型中,通过螺钉将安装板初步安装在机械臂上,使机械臂重心处位于通槽内,面积较大的通槽为安装板的安装提供的容错率,通过活动的螺杆和活动板可以将吸振器移动至通槽内任意位置,便于吸振器与机械臂的重心重合,充分利用吸振器的吸振效果。
技术特征:
1.一种动力吸振器的微调装置,包括水平设置的安装板(1),安装板(1)上安装有螺钉(2),其特征在于:所述安装板(1)上开设有上下相通的通槽,通槽内水平设置有与之呈前后滑动配合的活动板(6),安装板(1)上设置有用于调节活动板(6)位置的调节组件,活动板(6)上开设有上下相通的滑槽(7),滑槽(7)内独立竖直穿装有螺杆(4),螺杆(4)底部固定有吸振器,螺杆(4)上安装有用于锁定螺杆(4)位置的锁定组件。
2.根据权利要求1所述的动力吸振器的微调装置,其特征在于:所述调节组件包括调节板(9),活动板(6)上开设有前后相通的限位槽,调节板(9)独立穿装在限位槽中,调节板(9)的两端穿出限位槽后固定在通槽侧壁上,沿调节板(9)的长度方向在调节板(9)顶部等间距开设有若干个锁定孔(8),活动板(6)顶部设置有支架(11),支架(11)呈开口朝下的“u”字形结构,支架(11)上竖直穿装有滑杆(10),支架(11)内的滑杆(10)上套装有拉簧(12),拉簧(12)自然状态下,滑杆(10)的底部穿入活动板(6)后插入锁定孔(8)中。
3.根据权利要求1或2所述的动力吸振器的微调装置,其特征在于:所述锁定组件包括螺母(5),螺杆(4)的上端穿出滑槽(7)后固定有挡板(3),螺母(5)套装在活动板(6)下方的螺杆(4)上,滑槽(7)的槽宽小于挡板(3)与螺母(5)的直径。
4.根据权利要求1所述的动力吸振器的微调装置,其特征在于:所述通槽的左右槽壁上开设有导向槽,活动板(6)的两端分别插入对应的导向槽中。
5.根据权利要求4所述的动力吸振器的微调装置,其特征在于:所述安装板(1)四个顶角处开设有上下相通的螺纹孔,螺纹孔内均穿装有与之呈螺纹配合的螺钉(2)。
技术总结
本技术属于吸振器安装技术领域,尤其是涉及一种动力吸振器的微调装置。技术包括水平设置的安装板,安装板上安装有螺钉,所述安装板上开设有上下相通的通槽,通槽内水平设置有与之呈前后滑动配合的活动板,安装板上设置有用于调节活动板位置的调节组件,活动板上开设有上下相通的滑槽,滑槽内独立竖直穿装有螺杆,螺杆底部固定有吸振器,螺杆上安装有用于锁定螺杆位置的锁定组件。本技术中,通过螺钉将安装板初步安装在机械臂上,使机械臂重心处位于通槽内,面积较大的通槽为安装板的安装提供的容错率,通过活动的螺杆和活动板可以将吸振器移动至通槽内任意位置,便于吸振器与机械臂的重心重合,充分利用吸振器的吸振效果。
技术研发人员:刘晨旭,张泽
受保护的技术使用者:贵州大学
技术研发日:20230504
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!