一种自更换电池的机器人的制作方法
本技术涉及一种机器人,特别是涉及一种自更换电池的机器人。
背景技术:
1、随着科技的发展,机器人已普遍出现在人们的生产生活中。如家用的智能扫地机器人、炒菜机器人,或者商业用的迎宾机器人等。机器人通常采用电池供电,包括采用蓄电池或充电电池等。为了使机器人能够长时间作业,一般采用两组电池进行交替供电,由此带来的电池更换问题也同样难以解决。
2、对于体积较小的机器人,如家用的扫地机器人等,其所用电池也较小,人工可以轻易自主替换。而对于一些大型的机器人,如人形机器人、搬运机器人等,其所用电池也相对更大,电池本身重量大,且安装在机器人内部更难以取出,往往还需要借助其他工具进行更换电池。人工更换电池不仅效率低、存在安全风险,同时由于需要辅助工具,增加了更换电池的成本。
技术实现思路
1、基于此,有必要针对现有的机器人难以自动更换电池导致电池更换效率低、成本高的问题,提供一种自更换电池的机器人。
2、本实用新型通过以下技术方案实现:一种自更换电池的机器人包括本体、至少一个机械臂、与机械臂一一对应的机械手、电池仓、伸缩组件、开关、备用电池、电动仓门、充电保护器和磁性开关。
3、本体上开设有凹槽,开关安装在凹槽内。电池仓设置在本体上;电池仓用于安装电池,以提供机器人作业所需的电能。伸缩组件安装在电池仓内,用于将电池移出电池仓。机械臂固定端安装在本体上;机械臂的移动端能在一个靠近本体的移动范围内任意移动。至少一个机械手安装在所述移动端上;机械手用于启动开关并夹持电池。备用电池用于在将电池移出电池仓时对机器人供电。
4、故,本体内开设有用于收容开关的凹槽。电池仓开设在本体内,用于安装电池,从而对电力系统进行供电,以使机器人能够长时间运行。伸缩组件安装在电池仓内,伸缩组件可以沿电池仓的开口方向驱动电池移动,从而将电池推出电池仓外。机械臂的一端固定连接在本体上,另一端与机械手固定连接。机械臂可以驱动机械手在一个空间范围内任意移动。机械手用于启动开关并夹持电池。备用电池用于在将电池移出电池仓时对机器人供电。
5、上述机器人在电池的剩余电量低于一个预设值时,通过机械手启动开关,控制电动伸缩杆启动,将电池移出电池仓外。机械手在启动开关的同时抓取电池。此时通过备用电池对电力系统进行供电,以使机器人能够继续进行电池更换操作。机器人将电池放入充电箱中,并从充电箱中取出待用电池,将待用电池安装到电池仓内,完成电池更换操作。上述机器人可以自主完成更换电池操作,尤其对于体积大、重量大的电池,可以有效提高电池更换的效率,避免人工更换电池的安全风险。
6、在其中一个实施例中,伸缩组件包括电动伸缩杆和驱动块。电动伸缩杆的一端固定连接在电池仓内;驱动块安装在电动伸缩杆的另一端。
7、故,电动伸缩杆安装在电池仓内,且驱动块安装在电动伸缩杆的移动端。电动伸缩杆与开关电连接。
8、在其中一个实施例中,驱动块可以采用磁性材料,且电池靠近驱动块的一侧采用与驱动块相匹配的磁性材料。
9、在其中一个实施例中,所述电池仓的开口处安装有电动仓门;电动仓门在开关启动时打开。
10、故,电动仓门安装在电池仓的开口处。电动仓门同样与开关电连接。
11、在其中一个实施例中,机械手上设置有定位块。定位块与凹槽相匹配,用于启动开关,并确认机械手与电池仓的相对位置。
12、在其中一个实施例中,定位块设置为锁芯,凹槽内安装与所述锁芯匹配的锁孔。
13、故,定位块设置为锁芯形状,凹槽对应设置为锁孔状,以防止安装在凹槽内的开关被误触。
14、在其中一个实施例中,所述机械手上开设有用于滑动连接定位块的滑槽;滑槽内安装有驱动组件;驱动组件用于驱动定位块移动,以使定位块刚好卡接入凹槽内。
15、故,机械手上开设有滑槽,滑槽内则安装有定位块和驱动组件。驱动组件固定连接在滑槽内,定位块固定连接在驱动组件的移动端,定位块与滑槽滑动连接。驱动组件可以驱动定位块在滑槽内滑动,以使定位块伸出滑槽外,进而与凹槽相匹配。
16、在其中一个实施例中,备用电池与电池仓的输出端电连接;电池仓中装入电池后对备用电池充电。
17、故,备用电池通过电池仓与电池电连接。在更换电池后,更换的满电电池可以同时对备用电池进行供电,以使备用电池保持满电状态。
18、在其中一个实施例中,电池仓与备用电池之间还连接一个充电保护器;充电保护器用于在备用电池电量充足时断开电池仓与备用电池的连接状态。
19、故,充电保护器连接在备用电池和电池仓之间。满电电池安装在电池仓内时,对备用电池进行充电。当备用电池的电量充满时,充电保护器自动断开,避免备用电池过载导致损坏。
20、在其中一个实施例中,备用电池和电池仓之间还连接一个磁性开关;磁性开关在电池对机器人供电时断开备用电池与机器人之间的连通状态。
21、故,磁性开关连接在备用电池和电池仓之间。当电池仓内已安装电池时,磁性开关触发自动断开,备用电池与电力系统也随之断开连接。而在电池仓内的电池被移出时,磁性开关则恢复至闭合状态,备用电池可以对电力系统进行供电。
22、与现有技术相比,本实用新型具备如下有益效果:
23、1.本实用新型的机器人在电池的剩余电量低于一个预设值时,通过机械手启动开关,控制电动伸缩杆启动,将电池移出电池仓外。机械手在启动开关的同时抓取电池。此时通过备用电池对电力系统进行供电,以使机器人能够继续进行电池更换操作。机器人将电池放入充电箱中,并从充电箱中取出待用电池,将待用电池安装到电池仓内,完成电池更换操作。本实用新型可以自主完成更换电池操作,尤其对于体积大、重量大的电池,可以有效提高电池更换的效率,避免人工更换电池的安全风险。
24、2.本实用新型可以搭配相应的电池箱进行自主更换电池,无需搭配备用电池进行更换电池操作。具体的,机器人移动至电池箱附近,通过调整位姿使电池箱上的定位块二插接入凹槽中,启动开关,进而将电池移出电池仓。此时机器人处于无电力供应状态,保持当前位姿不变。电池箱则进行自主更换电池,通过旋转机构将具有待用电池的电池仓二转动至与电池仓正对,进而通过驱动机构将待用电池安装在电池仓内,完成电池的更换。相较于机器人的独立更换电池,与电池箱进行配合更换电池可以降低电池更换的成本,且能够适用于没有机械臂的其他类型的机器人,应用范围更广。
技术特征:
1.一种自更换电池的机器人,其特征在于,其包括:
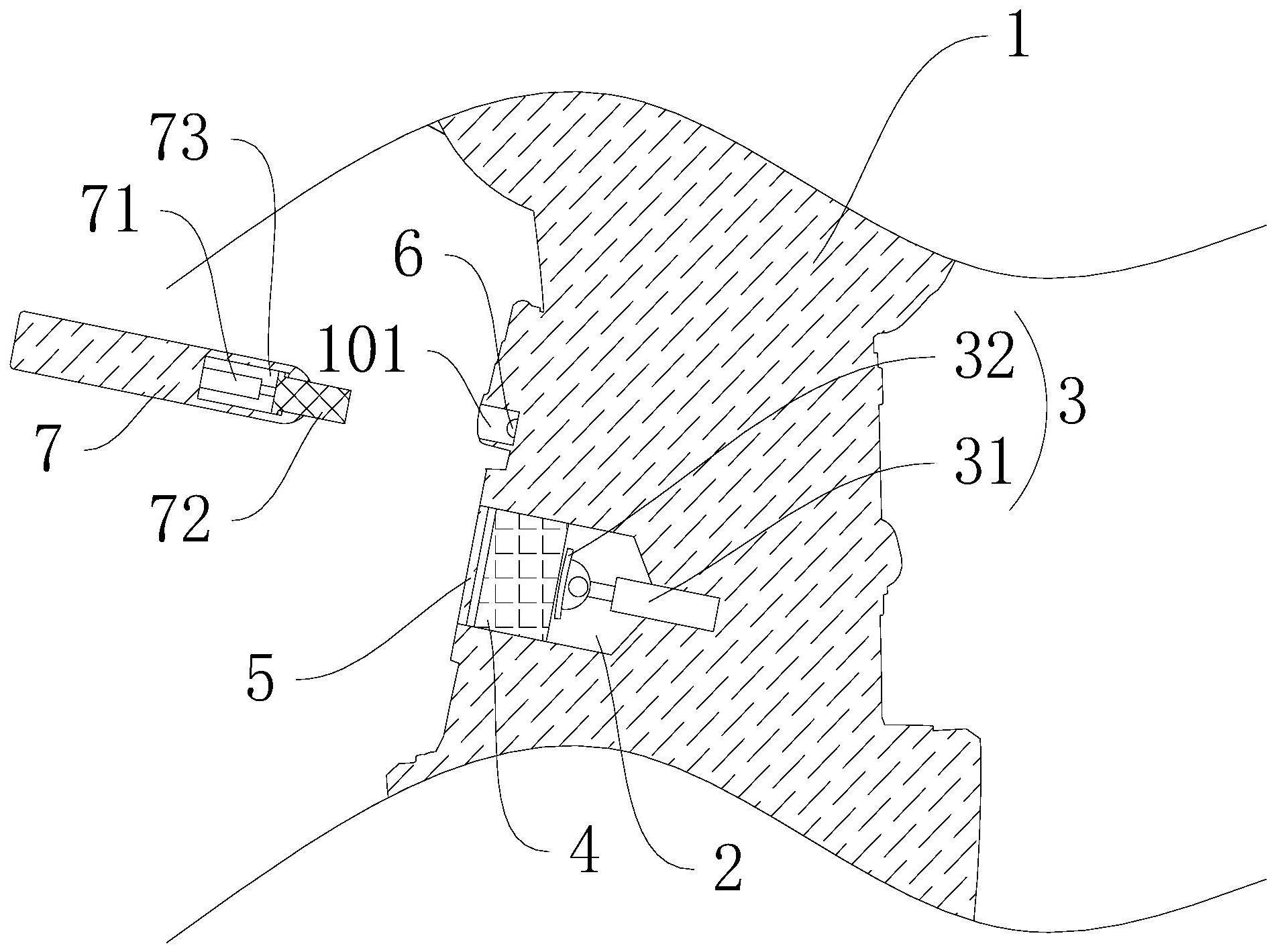
2.根据权利要求1所述的自更换电池的机器人,其特征在于,所述伸缩组件(3)包括电动伸缩杆(31)和驱动块(32);电动伸缩杆(31)的一端固定连接在电池仓(2)内;驱动块(32)安装在电动伸缩杆(31)的另一端。
3.根据权利要求2所述的自更换电池的机器人,其特征在于,驱动块(32)采用磁性材料,电池(4)靠近驱动块(32)的一侧采用与驱动块(32)相匹配的磁性材料。
4.根据权利要求1所述的自更换电池的机器人,其特征在于,所述电池仓(2)的开口处安装有电动仓门(5);电动仓门(5)在开关(6)启动时打开。
5.根据权利要求1所述的自更换电池的机器人,其特征在于,所述机械手(7)上设置有定位块(72);定位块(72)与凹槽(101)相匹配,用于启动开关(6),并确认机械手(7)与电池仓(2)的相对位置。
6.根据权利要求5所述的自更换电池的机器人,其特征在于,定位块(72)设置为锁芯,凹槽(101)内安装与所述锁芯匹配的锁孔。
7.根据权利要求5所述的自更换电池的机器人,其特征在于,所述机械手(7)上开设有用于滑动连接定位块(72)的滑槽(73);滑槽(73)内安装有驱动组件(71);驱动组件(71)用于驱动定位块(72)移动,以使定位块(72)刚好卡接入凹槽(101)内。
8.根据权利要求7所述的自更换电池的机器人,其特征在于,备用电池(9)与电池仓(2)的输出端电连接;电池仓(2)中装入电池(4)后对备用电池(9)充电。
9.根据权利要求1所述的自更换电池的机器人,其特征在于,电池仓(2)与备用电池(9)之间还连接一个充电保护器(10);充电保护器(10)用于在备用电池(9)电量充足时断开电池仓(2)与备用电池(9)的连接状态。
10.根据权利要求1所述的自更换电池的机器人,其特征在于,备用电池(9)和电池仓(2)之间还连接一个磁性开关(11);磁性开关(11)在电池(4)对机器人供电时断开备用电池(9)与机器人之间的连通状态。
技术总结
本技术涉及一种自更换电池的机器人。机器人包括本体、机械臂、机械手、电池仓、伸缩组件、开关和备用电池。本体内开设有用于收容开关的凹槽。电池仓开设在本体内。伸缩组件安装在电池仓内,用于将电池推出电池仓外。机械臂用于驱动机械手移动,进而启动开关。备用电池用于在将电池移出电池仓时对机器人供电。本技术通过机械手启动开关,控制电动伸缩杆启动,将电池移出电池仓外,机械手将电池放入充电箱中,并从充电箱中取出待用电池安装到电池仓内,完成电池更换操作。本技术可以自主完成更换电池操作,尤其对于体积大、重量大的电池,可以有效提高电池更换的效率,避免人工更换电池的安全风险。
技术研发人员:张涛,张超力,刘志刚,王志红,武龙,吕恒辉
受保护的技术使用者:鄂尔多斯市昊华红庆梁矿业有限公司
技术研发日:20230510
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!