具有防误伤功能设计的关节组件和机器人的制作方法
本申请涉及机器人,例如涉及一种具有防误伤功能设计的关节组件和机器人。
背景技术:
1、随着机器人的广泛普及,越来越多的机器人被应用到生产与生活中去,如一些高危工作,或者需要机器人起到教育、陪伴作用的场景,因此对机器人的要求越来越高,尤其是对机器人自身的安全性方面。
2、相关技术中,在机器人的驱动装置与运动关节之间,通常设置传动件,使驱动装置通过传动件带动机器人的运动关节运动。当传动件运动时,传动件与传动件之间、传动件与机器人其他部件之间会发生相对移动,传动件与传动件之间的距离、传动件与机器人其他部件之间的距离会变大或变小。此时,若传动件与传动件之间或传动件与其他部件之间存在异物,传动件运动使距离变小时,异物会影响传动件的运动,并且异物会被夹坏,例如,当异物为手指时,用户会被夹伤,机器人的安全性较低。
技术实现思路
1、为了对披露的实施例的一些方面有基本的理解,下面给出了简单的概括。所述概括不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围,而是作为后面的详细说明的序言。
2、本公开实施例提供一种具有防误伤功能设计的关节组件,以提高机器人自身的安全性。
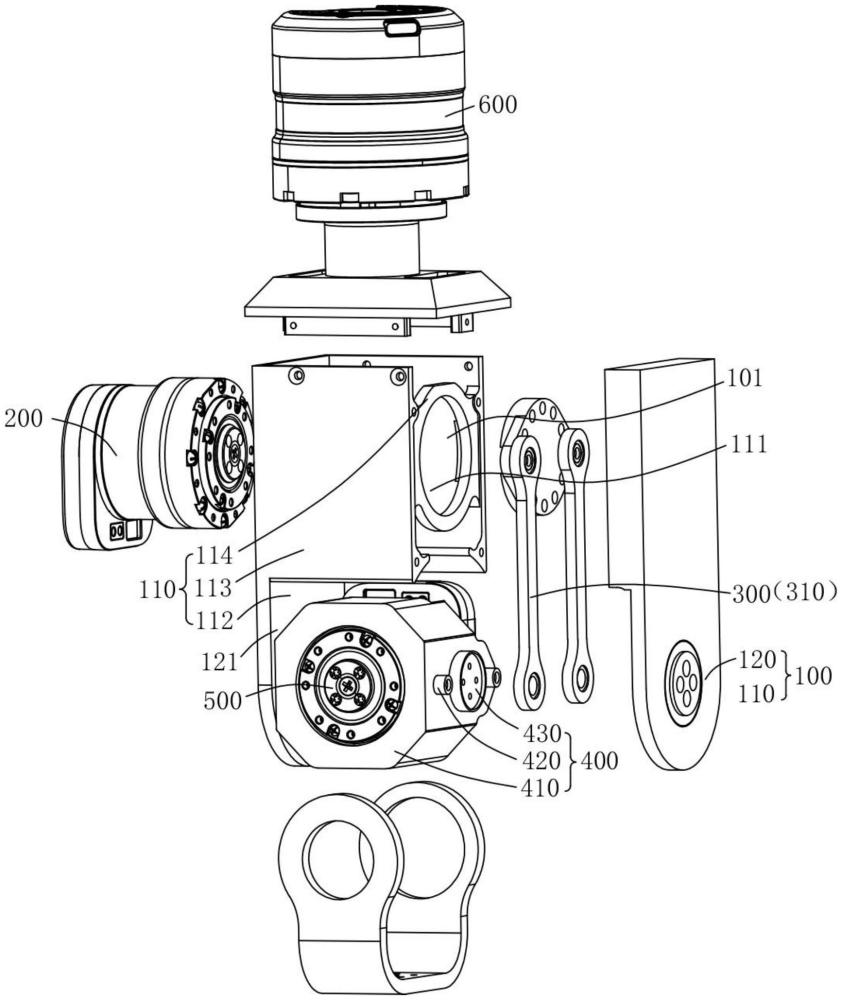
3、根据本申请第一个方面的实施例,提供了一种具有防误伤功能设计的关节组件,包括:壳体,限定出容纳空间;第一执行器,设于所述容纳空间内,用于控制关节第一方向的摆动;第二执行器,设于所述容纳空间内,用于控制关节第二方向的摆动,所述第一方向与所述第二方向相交;传动件,设于所述容纳空间内,所述传动件的一端与所述第一执行器的输出端相连接,所述传动件的另一端与所述第二执行器转动连接,所述传动件带动所述第二执行器沿所述第一方向摆动,以使关节以所述第二执行器为中心沿所述第一方向和/或所述第二方向摆动。
4、在一些可选实施例中,所述壳体包括:第一子壳体,限定出一端开口的第一子容纳空间,所述第一执行器位于所述第一子容纳空间内;安装架,与所述第一子壳体相连接,且位于所述开口处,所述安装架用于安装所述第一执行器;第二子壳体,盖设于所述开口处,限定出第二子容纳空间,所述传动件位于所述第二子容纳空间内;其中,所述容纳空间包括所述第一子容纳空间与所述第二子容纳空间。
5、在一些可选实施例中,所述第一子壳体包括第一侧壁和第二侧壁,所述第一侧壁与所述开口相对设置,所述第一侧壁与所述第二子壳体限定出第三子容纳空间,所述摆动件设于所述第三子容纳空间内,所述容纳空间包括所述第三子容纳空间;其中,所述第一侧壁与所述第二侧壁的延伸方向相同,且所述第一侧壁与所述第二侧壁相连接,所述第二侧壁的延伸长度小于所述第一侧壁的延伸长度,以避让所述摆动件及所述摆动件带动的部件的摆动。
6、在一些可选实施例中,所述传动件包括:两个连杆,两个所述连杆的一端分别设于所述第一执行器的输出端的轴线的两侧,所述连杆的一端与所述第一执行器的输出端转动连接,所述第一执行器的输出端转动时,两个所述连杆反向运动,两个所述连杆的另一端分别与第二执行器相连接,以使第二执行器以两个所述连杆的另一端之间的连线的中点为中心进行第一方向的摆动。
7、在一些可选实施例中,所述具有防误伤功能设计的关机组件还包括:摆动件,设于所述容纳空间内,所述摆动件包括壳本体和第一连接件,所述第一连接件设于所述壳本体的外侧壁,所述壳本体限定出安装空间,所述第二执行器设于所述安装空间内,所述第一连接件与所述传动件转动连接,以使所述传动件与所述第二执行器转动连接。
8、在一些可选实施例中,所述第二执行器包括执行器本体和第二连接件,第二连接件设于所述执行器本体外侧壁,所述第二连接件与所述传动件转动连接,以使所述传动件与所述第二执行器转动连接。
9、在一些可选实施例中,还包括:连接轴,与所述第二执行器相连接,且位于所述第二执行器沿第一方向摆动的轴线上,所述连接轴与所述壳体的侧壁转动连接。
10、在一些可选实施例中,所述第二执行器的输出端适于与手掌构件相连接,所述具有防误伤功能设计的关节组件为腕关节。
11、在一些可选实施例中,所述具有防误伤功能设计的关节组件还包括:第三执行器,所述第三执行器的输出端与所述壳体相连接,用于带动所述壳体在第三方向上转动,以控制关节第三方向的转动。
12、根据本申请第二个方面的实施例,提供了一种机器人,包括如上述任一项所述的具有防误伤功能设计的关节组件。
13、本公开实施例提供的具有防误伤功能设计的关节组件和机器人,可以实现以下技术效果:
14、机器人关节的第一执行器、传动件和第二执行器设置在壳体的容纳空间内,壳体对第一执行器、传动件和第二执行器起遮挡与保护作用,防止异物位于第一执行器、传动件和第二执行器之间影响部件的运行,并且能够防止用户与多个部件接触,尤其是与传动件接触,用户被误伤,从而提高具有防误伤功能设计的关节组件的安全性。
15、以上的总体描述和下文中的描述仅是示例性和解释性的,不用于限制本申请。
技术特征:
1.一种具有防误伤功能设计的关节组件,其特征在于,包括:
2.根据权利要求1所述的具有防误伤功能设计的关节组件,其特征在于,所述壳体包括:
3.根据权利要求2所述的具有防误伤功能设计的关节组件,其特征在于,还包括:
4.根据权利要求3所述的具有防误伤功能设计的关节组件,其特征在于,
5.根据权利要求1所述的具有防误伤功能设计的关节组件,其特征在于,所述传动件包括:
6.根据权利要求1所述的具有防误伤功能设计的关节组件,其特征在于,
7.根据权利要求1所述的具有防误伤功能设计的关节组件,其特征在于,还包括:
8.根据权利要求1所述的具有防误伤功能设计的关节组件,其特征在于,
9.根据权利要求1所述的具有防误伤功能设计的关节组件,其特征在于,还包括:
10.一种机器人,其特征在于,包括:
技术总结
本申请涉及机器人技术领域,公开一种具有防误伤功能设计的关节组件和机器人,包括:壳体,限定出容纳空间;第一执行器,设于容纳空间内,用于控制关节第一方向的摆动;第二执行器,设于容纳空间内,用于控制关节第二方向的摆动;传动件,一端与第一执行器的输出端相连接,另一端与第二执行器转动连接,传动件带动第二执行器沿第一方向摆动,以使关节以第二执行器为中心沿第一方向和/或第二方向摆动。壳体能够对第一执行器、传动件与第二执行器起遮挡与保护作用,防止异物位于第一执行器、传动件与第二执行器之间影响部件的运行,并且能够防止用户与多个部件接触,用户被误伤,从而提高具有防误伤功能设计的关节组件的安全性。
技术研发人员:顾捷
受保护的技术使用者:上海傅利叶智能科技有限公司
技术研发日:20230517
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!