机器人夹爪刚性增强装置的制作方法
本技术涉及机器人,尤其涉及机器人夹爪刚性增强装置。
背景技术:
1、在现代物流行业中,已经大面积地采用机器人来替换人工。带有爪手的机器人,是一种利用棘爪来模拟人的动作的机器人,通常用来抓取零散的物。关节机器人,也称关节机械手臂或多关节机器人,其各个关节的运动都是转动,与人的手臂类似。关节机器人是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业。
2、然而现有的多关节机器人根据工作环境需要,通过夹爪工装进行工作时,若夹爪过长,载荷量过大,气缸的活塞杆处会因扭矩过大,刚性不足造成工作环境不稳的现象,因此我们提出了机器人夹爪刚性增强装置用于解决上述问题。
技术实现思路
1、本实用新型的目的是为了解决上述中的缺点,而提出的机器人夹爪刚性增强装置。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、机器人夹爪刚性增强装置,包括多关节机器人本体,所述多关节机器人本体上设置有夹爪刚性增强机构,所述夹爪刚性增强机构包括气缸安装板、夹爪与手指气缸,所述手指气缸通过气缸安装板固定连接在多关节机器人本体上,两个夹爪分别固定连接在所述手指气缸的两端输出轴上。
4、优选的,所述气缸安装板通过螺栓安装在多关节机器人本体上,所述手指气缸固定连接在气缸安装板的一侧。
5、优选的,所述夹爪刚性增强机构还包括两个直线导轨和两个滑块固定块,两个滑块固定块分别滑动套设在对应的直线导轨的外侧,两个滑块固定块分别固定连接在对应的夹爪的一侧。
6、优选的,所述直线导轨的一侧固定连接有直线导轨安装板,两个直线导轨安装板分别固定连接在气缸安装板的前后侧。
7、优选的,所述多关节机器人本体的前侧固定连接有电气控制箱。
8、优选的,所述多关节机器人本体的底部固定连接有三个机器人底座,所述机器人底座的顶部开设有多干固定孔。
9、本实用新型中,所述的机器人夹爪刚性增强装置,通过气缸安装板与螺栓的设置,方便多关节机器人本体与手指气缸之间连接固定,通过两个夹爪,方便对产品的抓取,通过直线导轨安装板的设置,方便固定直线导轨,同时方便与气缸安装板进行连接固定,进而加强了装置的刚性;
10、本实用新型中,所述的机器人夹爪刚性增强装置,通过滑块固定块,是为刚性增强装置的移动部件,是连接夹爪的部件,同时可在直线导轨上进行滑动,根据气爪打开闭合而调整,而直线导轨,则是刚性增强装置固定部件,通过手指气缸为执行元件,控制夹爪打开闭合;
11、本实用新型结构设计合理,通过气缸安装板、滑块固定块、直线导轨、直线导轨安装板与夹爪的配合,大大加强了夹爪的刚性,提高多关节机器人本体工作时的平稳性,进而提高其工作精度和效率。
技术特征:
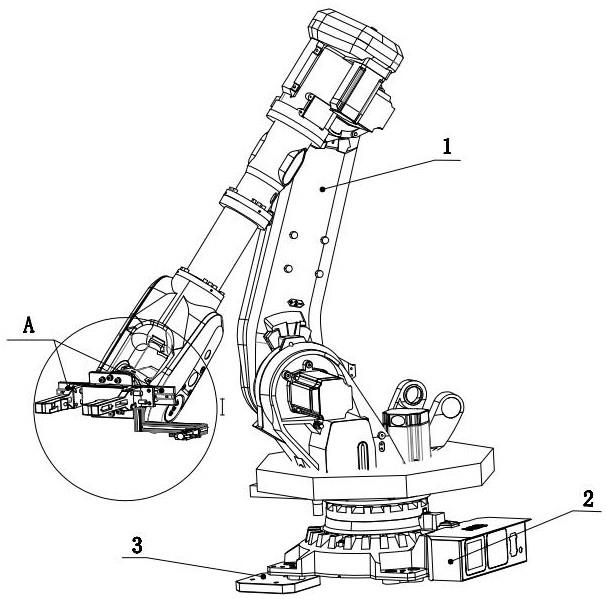
1.机器人夹爪刚性增强装置,其特征在于,包括多关节机器人本体(1),所述多关节机器人本体(1)上设置有夹爪刚性增强机构,所述夹爪刚性增强机构包括气缸安装板(4)、夹爪(5)与手指气缸(9),所述手指气缸(9)通过气缸安装板(4)固定连接在多关节机器人本体(1)上,两个夹爪(5)分别固定连接在所述手指气缸(9)的两端输出轴上。
2.根据权利要求1所述的机器人夹爪刚性增强装置,其特征在于,所述气缸安装板(4)通过螺栓安装在多关节机器人本体(1)上,所述手指气缸(9)固定连接在气缸安装板(4)的一侧。
3.根据权利要求1所述的机器人夹爪刚性增强装置,其特征在于,所述夹爪刚性增强机构还包括两个直线导轨(7)和两个滑块固定块(6),两个滑块固定块(6)分别滑动套设在对应的直线导轨(7)的外侧,两个滑块固定块(6)分别固定连接在对应的夹爪(5)的一侧。
4.根据权利要求3所述的机器人夹爪刚性增强装置,其特征在于,所述直线导轨(7)的一侧固定连接有直线导轨安装板(8),两个直线导轨安装板(8)分别固定连接在气缸安装板(4)的前后侧。
5.根据权利要求1所述的机器人夹爪刚性增强装置,其特征在于,所述多关节机器人本体(1)的前侧固定连接有电气控制箱(2)。
6.根据权利要求1所述的机器人夹爪刚性增强装置,其特征在于,所述多关节机器人本体(1)的底部固定连接有三个机器人底座(3),所述机器人底座(3)的顶部开设有多干固定孔。
技术总结
本技术属于机器人技术领域,尤其为机器人夹爪刚性增强装置,包括多关节机器人本体,所述多关节机器人本体上设置有夹爪刚性增强机构,所述夹爪刚性增强机构包括气缸安装板、夹爪与手指气缸,所述手指气缸通过气缸安装板固定连接在多关节机器人本体上,两个夹爪分别固定连接在所述手指气缸的两端输出轴上,所述气缸安装板通过螺栓安装在多关节机器人本体上,所述手指气缸固定连接在气缸安装板的一侧。本技术结构设计合理,通过气缸安装板、滑块固定块、直线导轨、直线导轨安装板与夹爪的配合,大大加强了夹爪的刚性,提高多关节机器人本体工作时的平稳性,进而提高其工作精度和效率。
技术研发人员:张程帅,李翔,任安红,王红升,游一博
受保护的技术使用者:常熟烁范智能装备制造有限公司
技术研发日:20230522
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!