一种人形机器人上肢roll方向控制结构的制作方法
本技术涉及人形机器人领域,具体是一种人形机器人上肢roll方向控制结构。
背景技术:
1、目前市场上的人形机器,通过模型框架和动力装置来组合,来实现对机器人运动的控制,但是现有的人形机器人上肢roll方向控制结构中,其与小臂的抛投控制结构大都分开的沿着手臂的方向设置,旋转控制和抛投控制整体占用空间较大,而且也加长了手臂的长度尺寸,同时,线路布局大都在执行结构的外部,不美观。因此,本领域技术人员提供了一种人形机器人上肢roll方向控制结构,以解决上述背景技术中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种人形机器人上肢roll方向控制结构,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
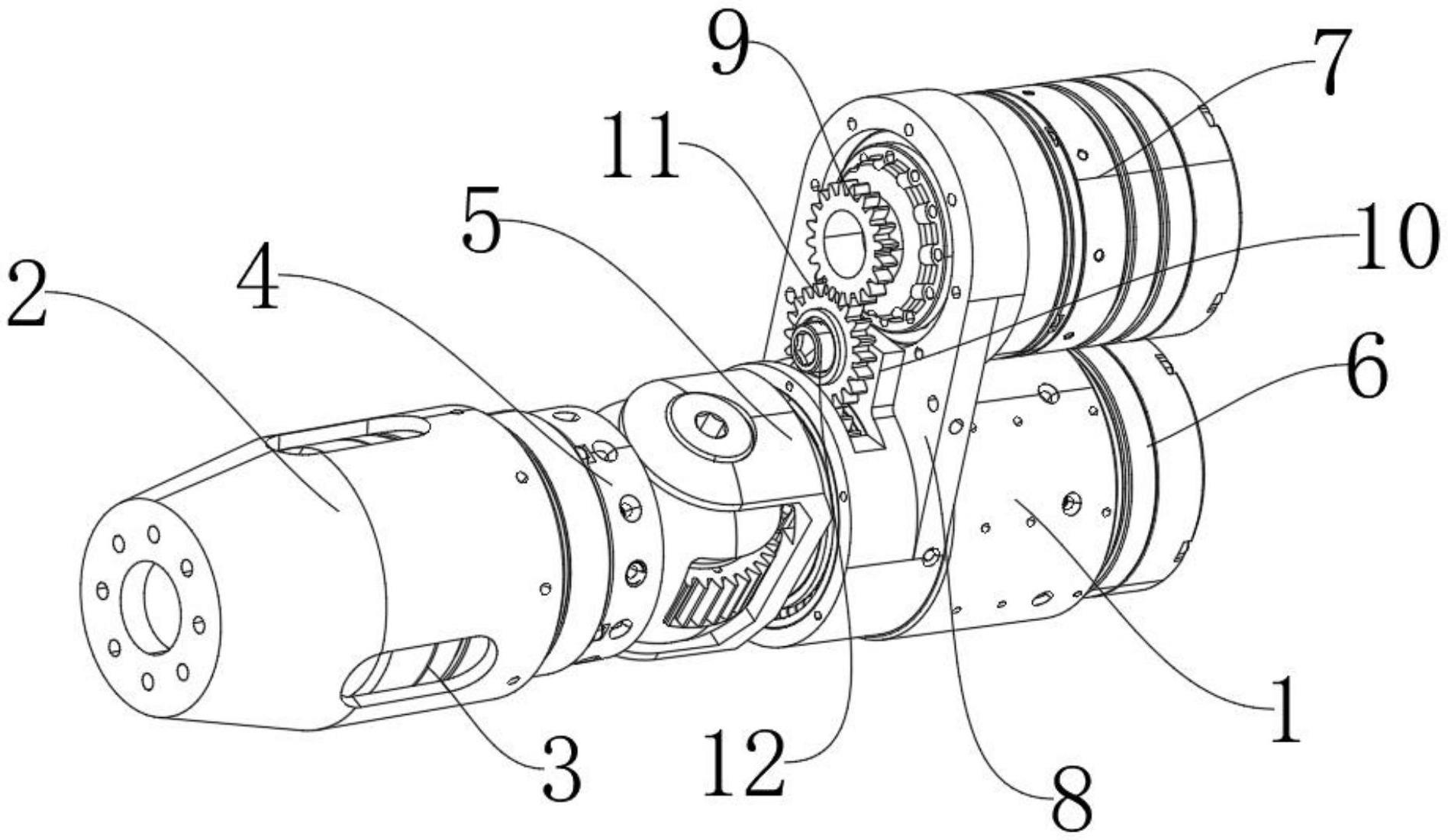
3、一种人形机器人上肢roll方向控制结构,包括机器人大臂,所述机器人大臂一端部固定连接有旋转支撑座,所述旋转支撑座一侧壁上设置有小臂旋转电机,所述机器人大臂内部通过螺钉连接有抛投动力电机,所述旋转支撑座另一侧壁上一体成型有传动支撑板,所述小臂旋转电机的输出轴穿过所述旋转支撑座后安装有动力齿轮,所述传动支撑板上设置有传动齿轮,所述传动齿轮与所述传动支撑板之间设置有传动锁紧组件,所述传动齿轮与所述动力齿轮啮合,所述小臂旋转电机的输出轴穿过所述旋转支撑座后安装有传动内套,所述传动内套外围设置有旋转外套,所述旋转外套外围设置有与所述传动齿轮啮合的旋转执行齿轮,所述旋转外套上位于所述旋转执行齿轮一侧一体成型有限位支撑环,所述限位支撑环一侧固定连接有抛投传动机构,所述传动内套与所述抛投传动机构内部的输入端固定连接。
4、作为本实用新型进一步的方案:所述抛投传动机构另一端部一体成型有旋转套,所述旋转套内部设置有手部旋转电机,所述手部旋转电机的输出端与所述旋转套通过螺钉连接,所述手部旋转电机的机壳外围通过螺钉连接有机器人小臂。
5、作为本实用新型进一步的方案:所述传动锁紧组件包括锁紧螺钉,设置在所述锁紧螺钉外围的内转套、设置在所述内转套外围的支撑轴承和设置在所述锁紧螺钉外围位于所述支撑轴承一侧的卡簧,所述传动齿轮与所述传动支撑板通过所述传动锁紧组件转动连接。
6、作为本实用新型进一步的方案:所述手部旋转电机以及所述抛投动力电机的主轴均为空心结构。
7、作为本实用新型进一步的方案:所述小臂旋转电机与所述旋转支撑座通过螺钉连接,所述小臂旋转电机与所述动力齿轮通过键连接。
8、作为本实用新型进一步的方案:所述抛投动力电机与所述机器人大臂通过螺钉连接,所述传动内套与所述旋转外套通过轴承转动连接。
9、与现有技术相比,本实用新型的有益效果是:
10、1、本实用新型将小臂旋转电机设置在抛投动力电机一侧,通过小臂旋转电机带动动力齿轮转动,进而在传动齿轮的传动下,可以带动旋转执行齿轮转动,进而可以带动传动内套、限位支撑环和抛投传动机构旋转,进而可以控制小臂进行旋转,这样的设置,将小臂的旋转控制和抛投控制融合到一块,可以实现对小臂的旋转控制,大大减少了旋转控制独立执行时所占用的空间,而且独立传动互不干扰,可执行性极强;
11、2、本实用新型中手部旋转电机以及抛投动力电机的主轴均为空心结构,可以便于在机器人大臂和机器人小臂内部隐藏布局控制线,确保电路更加整齐美观。
技术特征:
1.一种人形机器人上肢roll方向控制结构,包括机器人大臂(1),其特征在于:所述机器人大臂(1)一端部固定连接有旋转支撑座(8),所述旋转支撑座(8)一侧壁上设置有小臂旋转电机(7),所述机器人大臂(1)内部通过螺钉连接有抛投动力电机(6),所述旋转支撑座(8)另一侧壁上一体成型有传动支撑板(10),所述小臂旋转电机(7)的输出轴穿过所述旋转支撑座(8)后安装有动力齿轮(9),所述传动支撑板(10)上设置有传动齿轮(11),所述传动齿轮(11)与所述传动支撑板(10)之间设置有传动锁紧组件(12),所述传动齿轮(11)与所述动力齿轮(9)啮合,所述小臂旋转电机(7)的输出轴穿过所述旋转支撑座(8)后安装有传动内套(14),所述传动内套(14)外围设置有旋转外套(15),所述旋转外套(15)外围设置有与所述传动齿轮(11)啮合的旋转执行齿轮(16),所述旋转外套(15)上位于所述旋转执行齿轮(16)一侧一体成型有限位支撑环(13),所述限位支撑环(13)一侧固定连接有抛投传动机构(5),所述传动内套(14)与所述抛投传动机构(5)内部的输入端固定连接。
2.根据权利要求1所述的一种人形机器人上肢roll方向控制结构,其特征在于:所述抛投传动机构(5)另一端部一体成型有旋转套(4),所述旋转套(4)内部设置有手部旋转电机(3),所述手部旋转电机(3)的输出端与所述旋转套(4)通过螺钉连接,所述手部旋转电机(3)的机壳外围通过螺钉连接有机器人小臂(2)。
3.根据权利要求2所述的一种人形机器人上肢roll方向控制结构,其特征在于:所述传动锁紧组件(12)包括锁紧螺钉(1201),设置在所述锁紧螺钉(1201)外围的内转套(1204)、设置在所述内转套(1204)外围的支撑轴承(1203)和设置在所述锁紧螺钉(1201)外围位于所述支撑轴承(1203)一侧的卡簧,所述传动齿轮(11)与所述传动支撑板(10)通过所述传动锁紧组件(12)转动连接。
4.根据权利要求3所述的一种人形机器人上肢roll方向控制结构,其特征在于:所述手部旋转电机(3)以及所述抛投动力电机(6)的主轴均为空心结构。
5.根据权利要求4所述的一种人形机器人上肢roll方向控制结构,其特征在于:所述小臂旋转电机(7)与所述旋转支撑座(8)通过螺钉连接,所述小臂旋转电机(7)与所述动力齿轮(9)通过键连接。
6.根据权利要求5所述的一种人形机器人上肢roll方向控制结构,其特征在于:所述抛投动力电机(6)与所述机器人大臂(1)通过螺钉连接,所述传动内套(14)与所述旋转外套(15)通过轴承转动连接。
技术总结
本技术公开了人形机器人领域的一种人形机器人上肢roll方向控制结构,包括机器人大臂,所述机器人大臂一端部固定连接有旋转支撑座,所述旋转支撑座一侧壁上设置有小臂旋转电机,所述机器人大臂内部通过螺钉连接有抛投动力电机。本技术将小臂旋转电机设置在抛投动力电机一侧,通过小臂旋转电机带动动力齿轮转动,进而在传动齿轮的传动下,可以带动旋转执行齿轮转动,进而可以带动传动内套、限位支撑环和抛投传动机构旋转,进而可以控制小臂进行旋转,这样的设置,将小臂的旋转控制和抛投控制融合到一块,可以实现对小臂的旋转控制,大大减少了旋转控制独立执行时所占用的空间,而且独立传动互不干扰,可执行性极强。
技术研发人员:施群,何志雄,郑滨,吴志诚,张杰,吕雷
受保护的技术使用者:上海天太智动机器人有限公司
技术研发日:20230524
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!