一种工业机器人抓取装置
本技术涉及工业机器人,具体为一种工业机器人抓取装置。
背景技术:
1、相比于传统的工业设备,工业机器人有众多的优势,比如机器人具有易用性、智能化水平高、生产效率及安全性高、易于管理且经济效益显著等特点,使得它们可以在高危环境下进行作业。
2、常规的抓取装置,机器人在抓取物件的过程中,由于抓取装置需要对向移动夹住物件,而夹住物品时会把物件挤压的变形,因此需要受到限制,否则物件的外形会被破坏从而影响美观。
3、授权公告号cn 216127294 u,其说明书有益效果段记载了“用两块夹板的对向侧壁夹紧物件的侧壁,根据物件的宽度,抓住两块限制板左右调整好位置,再抓住限制板左右两侧的转环旋转对向移动,用转环的侧壁与限制板上端的侧壁相挤紧,两块夹板对向移动时,两个挡块也会跟着对向移动,而两个挡块的对向侧壁分别紧贴在两个限制板侧壁的同时,两块夹板会把下方的物件夹住,这样两块夹板就会受到限制板的阻挡,从而不会让两块夹板把物件夹的变形”,其通过设置限制板用来对两个夹板进行限位避免对物体施力过大造成物体损坏,但是其调整方式过于复杂且需要在停止抓取活动的前提下进行,这无疑会降低工业机器人抓取物体的效率。
技术实现思路
1、本实用新型解决的问题在于提供一种工业机器人抓取装置,以解决使用不便的问题。
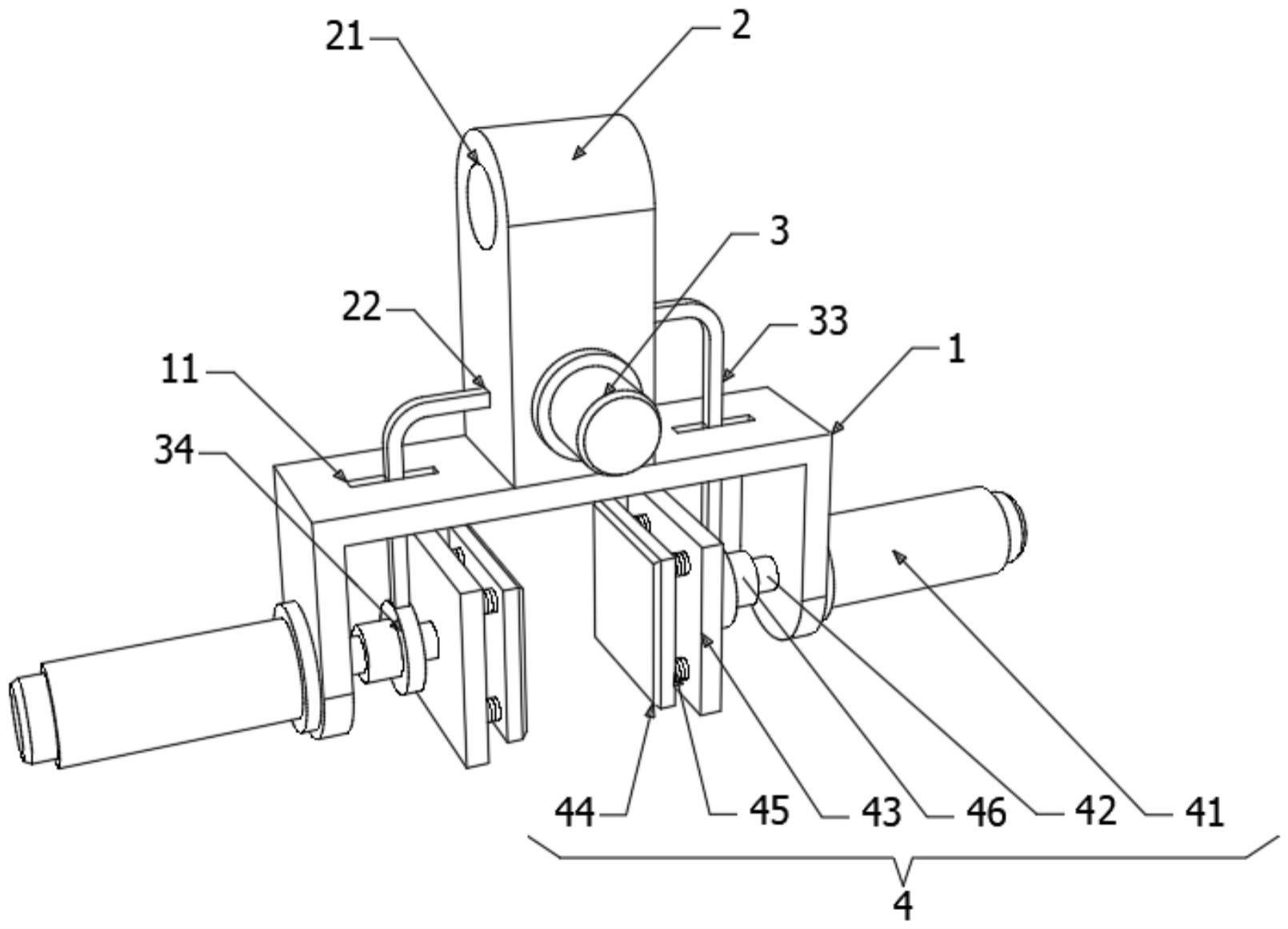
2、为了实现上述目的,本实用新型采用了如下技术方案:一种工业机器人抓取装置,包括安装座和连接座,所述安装座的顶端固定安装连接座,所述连接座的外侧壁固定安装电机,所述电机的输出端安装齿轮,所述齿轮的外环壁啮合安装两个齿条,两个所述齿条相远离一端均固定安装l型滑杆,两个所述l型滑杆的底端均垂直固定安装有挡环,所述安装座内侧滑动安装两个伸缩杆,两个所述伸缩杆相向一端均安装挤压板,两个所述挡环分别环绕套装在对应伸缩杆外杆壁。
3、优选的,所述安装座两侧均安装挤压机构,两个所述挤压机构均包括伸缩气缸,两个所述伸缩气缸分别垂直固定安装在安装座两侧,两个所述伸缩气缸的输出端均连接伸缩杆,两个所述伸缩杆的外杆壁均固定套装有限位环,两个所述限位环分别与对应挡环相抵触设置。
4、优选的,两个所述伸缩杆的末端均贯穿延伸至安装座内侧,且垂直固定安装有固定板,两个所述固定板相向一侧均设置有挤压板,两个所述挤压板与对应固定板之间固定安装有若干弹簧。
5、优选的,两个所述挡环的内径与对应伸缩杆的外径一致。
6、优选的,所述安装座的顶端贯穿下底开设有两道限位滑孔,两个所述l型滑杆分别滑动安装在对应限位滑孔内,且两个所述l型滑杆宽度与对应限位滑孔的孔宽一致。
7、优选的,所述连接座两侧贯穿开设有安装孔,所述连接座两相对外侧壁均贯穿内腔开设有开口,两个所述l型滑杆分别滑动贯穿对应开口设置。
8、本实用新型的有益效果是:
9、首先,设置两个挡环活动套装在伸缩杆上,伸缩杆的末端安装挤压板,通过两个挤压板挤压在物体两侧,实现抓取物体,在伸缩杆外杆壁固定套装限位环,当挡环与限位环相抵触时,就能够实现对挤压板的限制,避免对物体挤压过度造成物体被损坏;
10、然后,两个挡环分别与对应l型滑杆安装,而l型滑杆的另一端安装齿条,两个齿条是与齿轮啮合安装,齿轮是被电机驱动旋转,因此通过电机驱动就能够同时实现两个挡环在对应伸缩杆上滑动,进而最终调整两个挤压板的最大允许伸缩线程,从而避免对物体挤压过度造成物体被损坏。
技术特征:
1.一种工业机器人抓取装置,包括安装座(1)和连接座(2),其特征在于,所述安装座(1)的顶端固定安装连接座(2),所述连接座(2)的外侧壁固定安装电机(3),所述电机(3)的输出端安装齿轮(31),所述齿轮(31)的外环壁啮合安装两个齿条(32),两个所述齿条(32)相远离一端均固定安装l型滑杆(33),两个所述l型滑杆(33)的底端均垂直固定安装有挡环(34),所述安装座(1)内侧滑动安装两个伸缩杆(42),两个所述伸缩杆(42)相向一端均安装挤压板(44),两个所述挡环(34)分别环绕套装在对应伸缩杆(42)外杆壁。
2.根据权利要求1所述的一种工业机器人抓取装置,其特征在于,所述安装座(1)两侧均安装挤压机构(4),两个所述挤压机构(4)均包括伸缩气缸(41),两个所述伸缩气缸(41)分别垂直固定安装在安装座(1)两侧,两个所述伸缩气缸(41)的输出端均连接伸缩杆(42),两个所述伸缩杆(42)的外杆壁均固定套装有限位环(46),两个所述限位环(46)分别与对应挡环(34)相抵触设置。
3.根据权利要求1所述的一种工业机器人抓取装置,其特征在于,两个所述伸缩杆(42)的末端均贯穿延伸至安装座(1)内侧,且垂直固定安装有固定板(43),两个所述固定板(43)相向一侧均设置有挤压板(44),两个所述挤压板(44)与对应固定板(43)之间固定安装有若干弹簧(45)。
4.根据权利要求1所述的一种工业机器人抓取装置,其特征在于,两个所述挡环(34)的内径与对应伸缩杆(42)的外径一致。
5.根据权利要求1所述的一种工业机器人抓取装置,其特征在于,所述安装座(1)的顶端贯穿下底开设有两道限位滑孔(11),两个所述l型滑杆(33)分别滑动安装在对应限位滑孔(11)内,且两个所述l型滑杆(33)宽度与对应限位滑孔(11)的孔宽一致。
6.根据权利要求1所述的一种工业机器人抓取装置,其特征在于,所述连接座(2)两侧贯穿开设有安装孔(21),所述连接座(2)两相对外侧壁均贯穿内腔开设有开口(22),两个所述l型滑杆(33)分别滑动贯穿对应开口(22)设置。
技术总结
本技术涉及一种工业机器人抓取装置,包括安装座,连接座,安装座的顶端固定安装连接座,连接座的外侧壁固定安装电机,电机的输出端安装齿轮,齿轮的外环壁啮合安装两个齿条,两个齿条相远离一端均固定安装L型滑杆,两个L型滑杆的底端均垂直固定安装有挡环,安装座内侧滑动安装两个伸缩杆,两个伸缩杆相向一端均安装挤压板,两个挡环分别环绕套装在对应伸缩杆外杆壁,通过两个挤压板挤压在物体两侧,实现抓取物体,在伸缩杆外杆壁固定套装限位环,当挡环与限位环相抵触时,通过电机驱动就能够同时实现两个挡环在对应伸缩杆上滑动,进而最终调整两个挤压板的最大允许伸缩线程,从而避免对物体挤压过度造成物体被损坏。
技术研发人员:梁易华,殷宝荣,王德斌,单进
受保护的技术使用者:江苏省苏州技师学院
技术研发日:20230530
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!