一种积木机器人地脚支撑结构的制作方法
本技术涉及积木机器人,具体为一种积木机器人地脚支撑结构。
背景技术:
1、积木通常是立方的木头或塑料固体玩具,一般在每一表面装饰着字母或图画,容许进行不同的排列或进行建筑活动积木有各种样式,可开发儿童智力,可拼成房子,各种动物等,随着现代技术的发展,将积木与编程机器人结合也是一种流行趋势,积木机器人应用也越来越广泛。
2、中国专利cn215433705u公开了一种积木机器人地脚支撑结构,旨要解决的技术问题在于克服现有技术中积木机器人抗冲击能力差的缺陷,主要是通过以下技术方案得以实现的:一种积木机器人地脚支撑结构,包括:机器人本体、连接件和支撑件,机器人本体上设有连接件和支撑件,连接件定位转动安装在机器人本体底部,支撑件设在连接件底部;连接件侧边对称设有铰接边,铰接边通过铰接轴与支撑件铰接,连接件底部中心还设有球铰柱,球铰柱与支撑件球铰连接;支撑件从上至下依次包括第一支撑板、第二支撑板和支撑脚,在机器人本体底部配合设置连接件与支撑件,提升了机器人本体整体结构的稳定性,从而提升抗冲击力,避免其在运动过程中损坏。
3、上述专利针对现有技术中的积木机器人地脚支撑结构内部零部件繁琐且不便于安装,抵抗冲击能力较低的缺点进行了改进,本实施例则是针对上述专利所提出的问题提供了另一种实施方案。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种积木机器人地脚支撑结构,具备结构简单、稳定性高的优点,解决了现有技术中的积木机器人地脚支撑结构内部零部件繁琐且不便于安装,抵抗冲击能力较低的问题。
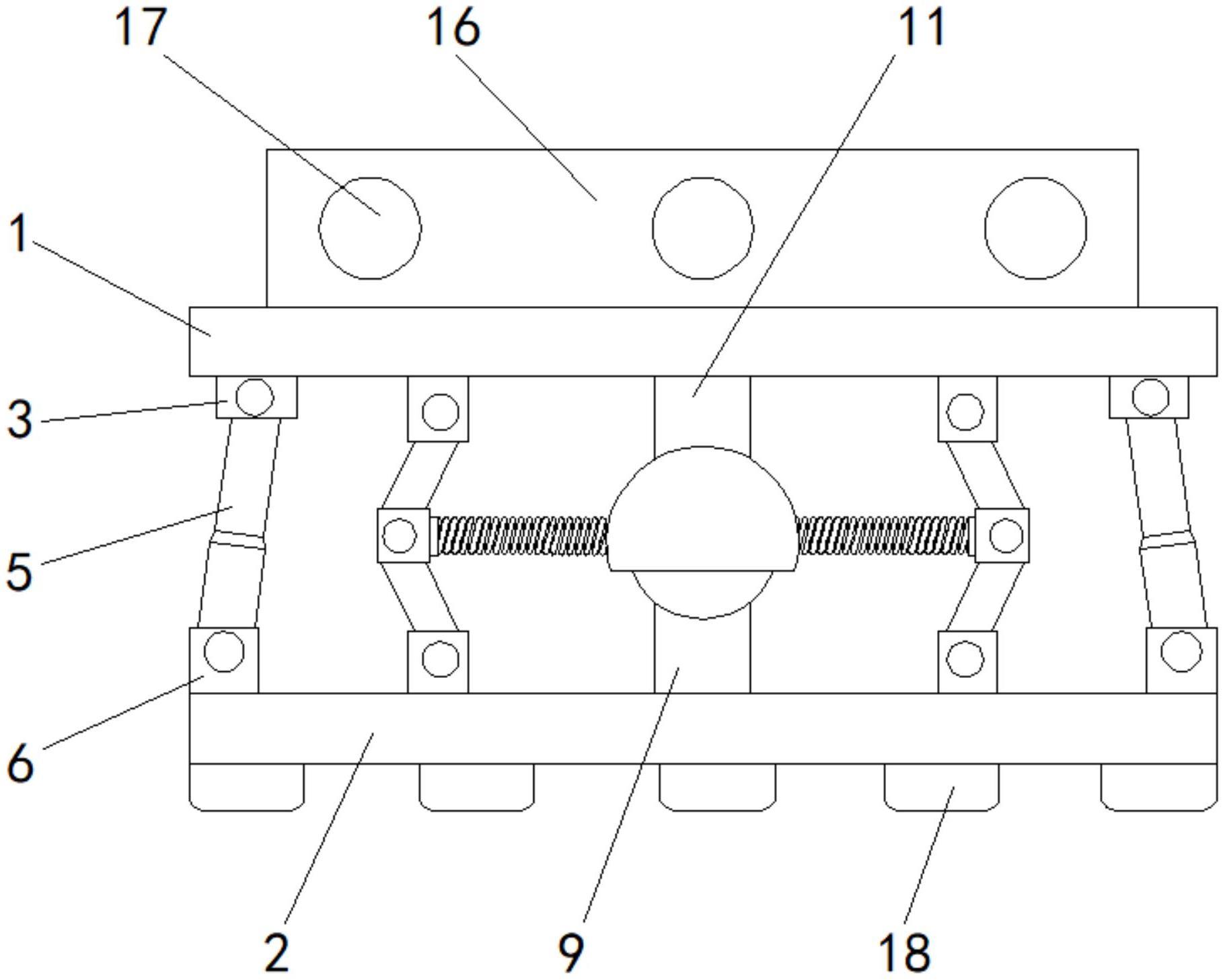
2、为实现上述目的,本实用新型提供如下技术方案:一种积木机器人地脚支撑结构,包括一号支撑板和二号支撑板,所述一号支撑板和二号支撑板之间设有支撑机构;
3、所述支撑机构包括固定安装于一号支撑板下表面的一号连接块和二号连接块,所述一号连接块表面转动安装有阻尼杆,所述阻尼杆远离一号连接块一端转动安装有三号连接块,所述三号连接块与二号支撑板上表面固定连接,所述二号连接块表面转动安装有连接杆,所述连接杆远离二号连接块一端转动安装有四号连接块,所述四号连接块与二号支撑板上表面固定连接,所述二号支撑板上表面固定安装有一号固定杆,所述一号固定杆远离二号支撑板一端固定安装有球头,所述一号支撑板下表面固定安装有二号固定杆,所述二号固定杆远离一号支撑板一端固定安装套接于与球头外表面的球头套。
4、进一步,所述连接杆表面固定安装有拉簧,所述拉簧远离连接杆一端与球头套外表面固定连接。
5、进一步,所述连接杆由转动块和转动安装于转动块表面的拉杆组成,每个所述转动块上的拉杆的数量为两个,所述拉簧固定安装于转动块侧表面。
6、进一步,所述一号支撑板上表面固定安装有安装板,所述安装板表面开设有安装孔。
7、进一步,所述二号支撑板下表面固定安装有数量为多个的橡胶块,相邻两个所述橡胶块之间的间距均相等。
8、进一步,所述球头外表面与球头套内侧表面之间滑动接触。
9、与现有技术相比,本申请的技术方案具备以下有益效果:
10、该积木机器人地脚支撑结构,通过在一号支撑板和二号支撑板之间设有多个阻尼杆和连杆,在连杆上设有拉簧,从而使支撑机构可以对受到的冲击进行缓冲,进而提高了地脚的抗冲击能力,解决了现有技术中的积木机器人地脚支撑结构内部零部件繁琐且不便于安装,抵抗冲击能力较低的问题。
技术特征:
1.一种积木机器人地脚支撑结构,包括一号支撑板(1)和二号支撑板(2),其特征在于:所述一号支撑板(1)和二号支撑板(2)之间设有支撑机构;
2.根据权利要求1所述的一种积木机器人地脚支撑结构,其特征在于:所述连接杆(7)表面固定安装有拉簧(13),所述拉簧(13)远离连接杆(7)一端与球头套(12)外表面固定连接。
3.根据权利要求2所述的一种积木机器人地脚支撑结构,其特征在于:所述连接杆(7)由转动块(14)和转动安装于转动块(14)表面的拉杆(15)组成,每个所述转动块(14)上的拉杆(15)的数量为两个,所述拉簧(13)固定安装于转动块(14)侧表面。
4.根据权利要求1所述的一种积木机器人地脚支撑结构,其特征在于:所述一号支撑板(1)上表面固定安装有安装板(16),所述安装板(16)表面开设有安装孔(17)。
5.根据权利要求1所述的一种积木机器人地脚支撑结构,其特征在于:所述二号支撑板(2)下表面固定安装有数量为多个的橡胶块(18),相邻两个所述橡胶块(18)之间的间距均相等。
6.根据权利要求1所述的一种积木机器人地脚支撑结构,其特征在于:所述球头(10)外表面与球头套(12)内侧表面之间滑动接触。
技术总结
本技术涉及一种积木机器人地脚支撑结构,包括一号支撑板和二号支撑板,所述一号支撑板和二号支撑板之间设有支撑机构,所述支撑机构包括固定安装于一号支撑板下表面的一号连接块和二号连接块,所述一号连接块表面转动安装有阻尼杆,所述阻尼杆远离一号连接块一端转动安装有三号连接块,所述三号连接块与二号支撑板上表面固定连接。该该积木机器人地脚支撑结构,通过在一号支撑板和二号支撑板之间设有多个阻尼杆和连杆,在连杆上设有拉簧,从而使支撑机构可以对受到的冲击进行缓冲,进而提高了地脚的抗冲击能力,解决了现有技术中的积木机器人地脚支撑结构内部零部件繁琐且不便于安装,抵抗冲击能力较低的问题。
技术研发人员:张波
受保护的技术使用者:江苏锦添人工智能科技有限公司
技术研发日:20230608
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!