双向拔除夹爪的制作方法
本技术涉及拔销机器人,特别涉及一种双向拔除夹爪。
背景技术:
1、运煤列车翻车机系统已经实现了其大部分流程的自动化,近年来投用的摘钩机器人系统进一步提升了翻车机系统的自动化,但是在摘钩动作之前,仍然有一些工作需要人工完成,例如拔销、摘风管等动作。
2、将列车解除连接需要释放钩舌,摘钩就是提起钩舌销的过程,提起钩舌销后,钩舌解除锁定状态,此时拖拽前后任意一节车厢即可打开钩舌。然而钩舌销本身也会被一个b型销锁定,这是为了防止钩舌销在列车行进过程中由于振动等原因意外打开,所以在列车进入摘钩工位前,会由专人对该b型销依次拔出。
3、拔销过程往往会在推车机推动车厢行进的过程中进行,工作人员跟随列车同步行进并使用钩爪对b型销依次拔除。b型销一般由一根铁链悬挂在车钩上,插回b型销的工作同样由人工完成,b型销从两侧均可插入,人工插入往往选择任意一边插入,所以拔销时也就存在两个不同的拔出方向,工作人员会采用拉和推的方式拔除不同方向插入的b型销。对此设计一种替代人为拔除的夹爪。
技术实现思路
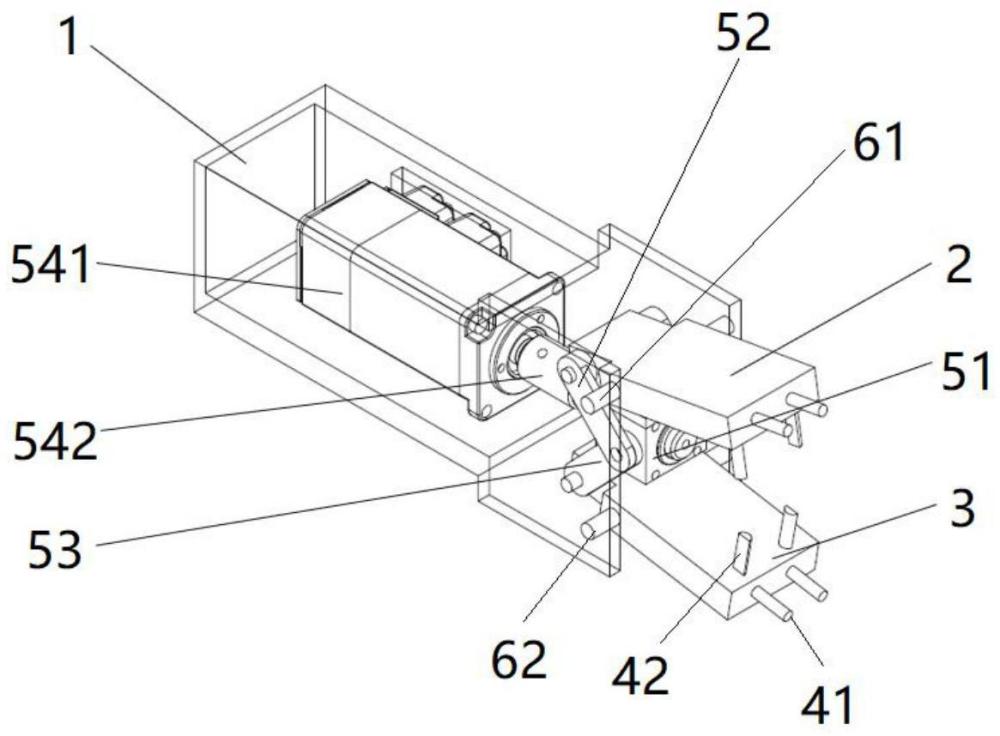
1、根据本实用新型实施例,提供了一种双向拔除夹爪,包含:
2、基座;
3、第一夹板,第一夹板可转动的设置在基座上;
4、第二夹板,第二夹板可转动的设置在基座上,第二夹板位于第一夹板的底部;
5、拔除模块,拔除模块与第一夹板和第二夹板相连,用于拔除运煤列车上的b型销;
6、驱动模块,驱动模块与基座、第一夹板、第二夹板相连,用于驱动第一夹板、第二夹板在基座上转动。
7、进一步,驱动模块包含:
8、移动块,移动块位于第一夹板和第二夹板之间;
9、一对第一连杆,一对第一连杆分别位于移动块的两侧,任一第一连杆的一端与移动块的一侧铰接,任一第一连杆的另一端与第一夹板的一侧铰接;
10、一对第二连杆,一对第二连杆分别位于移动块的两侧,任一第二连杆的一端与移动块的一侧铰接,任一第二连杆的另一端与第二夹板的一侧铰接;
11、驱动组件,驱动组件与基座、移动块相连,用于驱动移动块移动。
12、进一步,驱动组件包含:
13、电机,电机设置在基座上;
14、丝杆,丝杆的一端与电机的输出端相连,丝杆的另一端贯穿移动块,丝杆与移动块螺纹啮合。
15、进一步,拔除模块包含:
16、两对第一拔除爪,两对第一拔除爪分别位于第一夹板和第二夹板的一端两侧;
17、两对第二拔除爪,两对第二拔除爪分别位于第一夹板和第二夹板的相对面的一端两侧。
18、进一步,第一拔除爪为圆柱结构。
19、进一步,第二拔除爪为半圆柱结构。
20、根据本实用新型实施例的双向拔除夹爪,具备如下有益效果:
21、1、整个机构小巧灵活,结构简单紧凑,模块化设计;
22、2、模拟现有人工拔销动作,两侧插入的b型销均可拔除,可以几乎适应所有b型销工况;
23、3、采用电机驱动,输出稳定,扭矩大,相比于气动装置,工作更加稳定且安装维护更加简单。
24、要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并且意图在于提供要求保护的技术的进一步说明。
技术特征:
1.一种双向拔除夹爪,其特征在于,包含:
2.如权利要求1所述双向拔除夹爪,其特征在于,所述驱动模块包含:
3.如权利要求2所述双向拔除夹爪,其特征在于,所述驱动组件包含:
4.如权利要求1所述双向拔除夹爪,其特征在于,所述拔除模块包含:
5.如权利要求4所述双向拔除夹爪,其特征在于,所述第一拔除爪为圆柱结构。
6.如权利要求4或5所述双向拔除夹爪,其特征在于,所述第二拔除爪为半圆柱结构。
技术总结
本技术公开了一种双向拔除夹爪,包含:基座;第一夹板,第一夹板可转动的设置在基座上;第二夹板,第二夹板可转动的设置在基座上,第二夹板位于第一夹板的底部;拔除模块,拔除模块与第一夹板和第二夹板相连,用于拔除运煤列车上的B型销;驱动模块,驱动模块与基座、第一夹板、第二夹板相连,用于驱动第一夹板、第二夹板在基座上转动。本技术具备如下有益效果:1、整个机构小巧灵活,结构简单紧凑,模块化设计;2、模拟现有人工拔销动作,两侧插入的B型销均可拔除,可以几乎适应所有B型销工况;3、采用电机驱动,输出稳定,扭矩大,相比于气动装置,工作更加稳定且安装维护更加简单。
技术研发人员:张云飞,黄曙光,赵涛
受保护的技术使用者:上海酷酷机器人有限公司
技术研发日:20230608
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!