一种执行装置及作业机器人的制作方法
本申请涉及作业机器人。
背景技术:
1、作业机器人一般包括作业机器人主体和装配在作业机器人主体的执行装置,由作业机器人主体带动执行装置在预定区域内作业。市场上已经研发出机器人主体与执行装置快速拆卸的作业机器人,但是用于解锁机器人主体与执行装置的解锁装置目前还未寻找到合适的位置安装,不便于用户操控。
技术实现思路
1、为了克服上述现有技术的缺陷,本申请提供了一种执行装置及作业机器人。
2、在一个实施例中,一种执行装置,所述执行装置包括工作部件,所述工作部件可实现清扫积雪、清除杂草、播种、清洗表面中的一种或多种功能,所述执行装置还包括:
3、壳体;
4、连接件,所述连接件设于所述壳体,所述连接件被配置为与外界装置相连或分离;以及
5、驱动件,所述驱动件被配置为在外力作用下或在计算机程序控制下驱动连接件与外界装置相连或分离,所述驱动件设于所述壳体。
6、在一个实施例中,所述驱动件设于所述壳体的顶部,或者,所述驱动件邻近于所述壳体的顶部。
7、在一个实施例中,所述壳体具有容纳孔,至少部分所述驱动件容纳于所述容纳孔中,并通过所述容纳孔显露。
8、在一个实施例中,所述壳体形成有内腔,且壳体具有相邻的第一表面和第二表面,所述容纳孔位于所述壳体的第一表面和所述壳体的第二表面上,且与所述内腔连通;
9、所述驱动件具有相连的传动部和操作部,所述传动部位于所述内腔内,所述操作部容纳于所述容纳孔中,并与所述壳体的第一表面和所述壳体的第二表面的至少一个形成平齐表面。
10、在一个实施例中,所述操作部与所述壳体的第一表面形成平齐表面,且所述操作部凸出于所述壳体的第二表面。
11、在一个实施例中,所述操作部具有固定端和自由端;
12、所述固定端设置在所述壳体上,所述自由端通过所述固定端可相对于所述壳体转动;
13、所述固定端与所述壳体的第一表面形成平齐表面,所述自由端与所述壳体的第一表面形成平齐表面、且所述自由端凸出于所述壳体的第二表面。
14、在一个实施例中,所述壳体包括相互连接的第一壳体和第二壳体;
15、所述第一壳体具有第一缺口和第二缺口,所述第一缺口与所述第二缺口分布于所述第一壳体的两个相邻表面上,且所述第一缺口与所述第二缺口相互连通,所述第二壳体与所述第一壳体扣合以使所述第一缺口与所述第二缺口处形成所述容纳孔。
16、在一个实施例中,所述自由端在所述壳体的第一表面上的投影的至少一部分呈弧形。
17、在一个实施例中,所述容纳孔在所述壳体的第一表面上的投影呈条形。
18、在一个实施例中,作业机器人,包括作业机器人主体和所述执行装置,所述执行装置通过连接件与所述作业机器人主体连接。
19、本申请至少具有以下有益效果:
20、本申请的一种执行装置,执行装置包括工作部件,工作部件可实现清扫积雪、清除杂草、播种、清洗表面中的一种或多种功能,执行装置还包括:壳体;连接件,连接件设于壳体,连接件被配置为与外界装置相连或分离;以及驱动件,驱动件被配置为在外力作用下或在计算机程序控制下驱动连接件与外界装置相连或分离,驱动件设于壳体。
21、本申请提供的执行装置能够应用在作业机器人,在需将作业机器人主体和执行装置解锁时,通过对驱动件施加外力施加外力,使作业机器人主体和执行装置之间快速解锁,解锁过程简单,且花费时间短。
技术特征:
1.一种执行装置,其特征在于,所述执行装置包括工作部件,所述工作部件可实现清扫积雪、清除杂草、播种、清洗表面中的一种或多种功能,所述执行装置还包括:
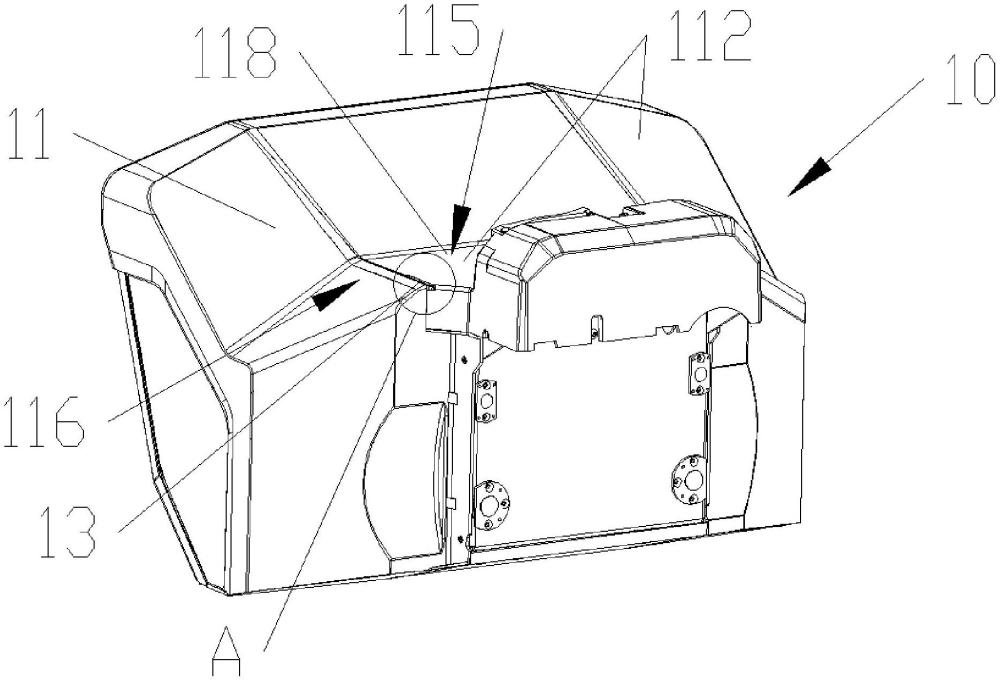
2.根据权利要求1所述的执行装置,其特征在于,所述驱动件(13)设于所述壳体的顶部(118),或者,所述驱动件(13)邻近于所述壳体的顶部(118)。
3.根据权利要求1或2所述的执行装置,其特征在于,所述壳体(11)具有容纳孔(14),至少部分所述驱动件(13)容纳于所述容纳孔(14)中,并通过所述容纳孔(14)显露。
4.根据权利要求3所述的执行装置,其特征在于,所述壳体(11)形成有内腔(111),且所述壳体(11)具有相邻的第一表面(113)和第二表面(114),所述容纳孔(14)位于所述壳体的第一表面(113)和所述壳体的第二表面(114)上,且与所述内腔(111)连通;
5.根据权利要求4所述的执行装置,其特征在于,所述操作部(131)与所述壳体的第一表面(113)形成平齐表面,且所述操作部(131)凸出于所述壳体的第二表面(114)。
6.根据权利要求5所述的执行装置,其特征在于,所述操作部(131)具有固定端(1311)和自由端(1312);
7.根据权利要求3所述的执行装置,其特征在于,所述壳体(11)包括相互连接的第一壳体(115)和第二壳体(116);
8.根据权利要求6所述的执行装置,其特征在于,所述自由端(1312)在所述壳体的第一表面(113)上的投影的至少一部分呈弧形。
9.根据权利要求3所述的执行装置,其特征在于,所述容纳孔(14)在所述壳体的第一表面(113)上的投影呈条形。
10.作业机器人,其特征在于,包括作业机器人主体(20)和权利要求1至9任一项所述执行装置(10),所述执行装置(10)通过连接件(12)与所述作业机器人主体(20)连接。
技术总结
本申请提供了一种执行装置及作业机器人,执行装置包括工作部件,工作部件可实现清扫积雪、清除杂草、播种、清洗表面中的一种或多种功能,执行装置还包括:壳体;连接件,连接件设于壳体,连接件被配置为与外界装置相连或分离;以及驱动件,驱动件被配置为在外力作用下或在计算机程序控制下驱动连接件与外界装置相连或分离,驱动件设于壳体。本申请提供的执行装置能够应用在作业机器人,在需将作业机器人主体和执行装置解锁时,通过对驱动件施加外力,使作业机器人主体和执行装置之间快速解锁,解锁过程简单,且花费时间短。
技术研发人员:黄阳,朱涛涛,宋永琪
受保护的技术使用者:深圳汉阳科技有限公司
技术研发日:20230619
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!