一种托举助力的外骨骼机器人的制作方法
本技术涉及机器人,尤其涉及一种托举助力的外骨骼机器人。
背景技术:
1、现有的长杆托举一般须配套云梯车或人字梯使用,例如:随着国家现代化进程的推进,各区域输配电、变电电压等级也不断提高,220kv、300kv、500kv等超高压电压等级使用越来越广泛。在220kv及以上变电站、输配电线路检修时,必不可少的一项操作为验电接地,即断电后验明线路是否带电并将线路使用地线接地。在接地操作过程中,目前最常用的操作方法为绝缘杆接地法,即使用一根与线路高度匹配的长绝缘杆将接地线挑起并挂接至需要接地的目标线路上。在现行的操作规程中,220kv及以上电压等级线路高度一般超过8m,接地线一般为35平方毫米以上铜线(每米重约360g)。若使用8m长的绝缘杆挑起长度超过8m的35方铜线,重量极重单人无法完成。故目前多使用云梯车或人字梯,升起一定高度后使用4m左右的绝缘杆来完成任务。但是,云梯车与人字梯的使用又带来一系列的繁琐操作与安全隐患,因此现有市场有一种能托举助力的外骨骼机器人的需求。
技术实现思路
1、本实用新型提供了一种托举助力的外骨骼机器人,其克服了背景技术中所存在的不足。
2、本实用新型解决其技术问题的所采用的技术方案是:一种托举助力的外骨骼机器人,包括:
3、背架模块;
4、第一臂模块,包括第一安装座、肩电机、第一转部、大臂部件、肘电机、第二转部和小臂部件;该第一安装座相对背架模块转动且通过转动构成扩胸运动自由度;该肩电机装设第一安装座上,该肩电机传动连接第一转部,该大臂部件连接第一转部,通过肩电机带动第一转部和大臂部件做肩转活动;该肘电机安装在大臂部件,该肘电机传动连接第二转部,该小臂部件传动连接第二转部,该小臂部件连接第二转部,通过肘电机带动第二转部和小臂部件做肘转活动;及
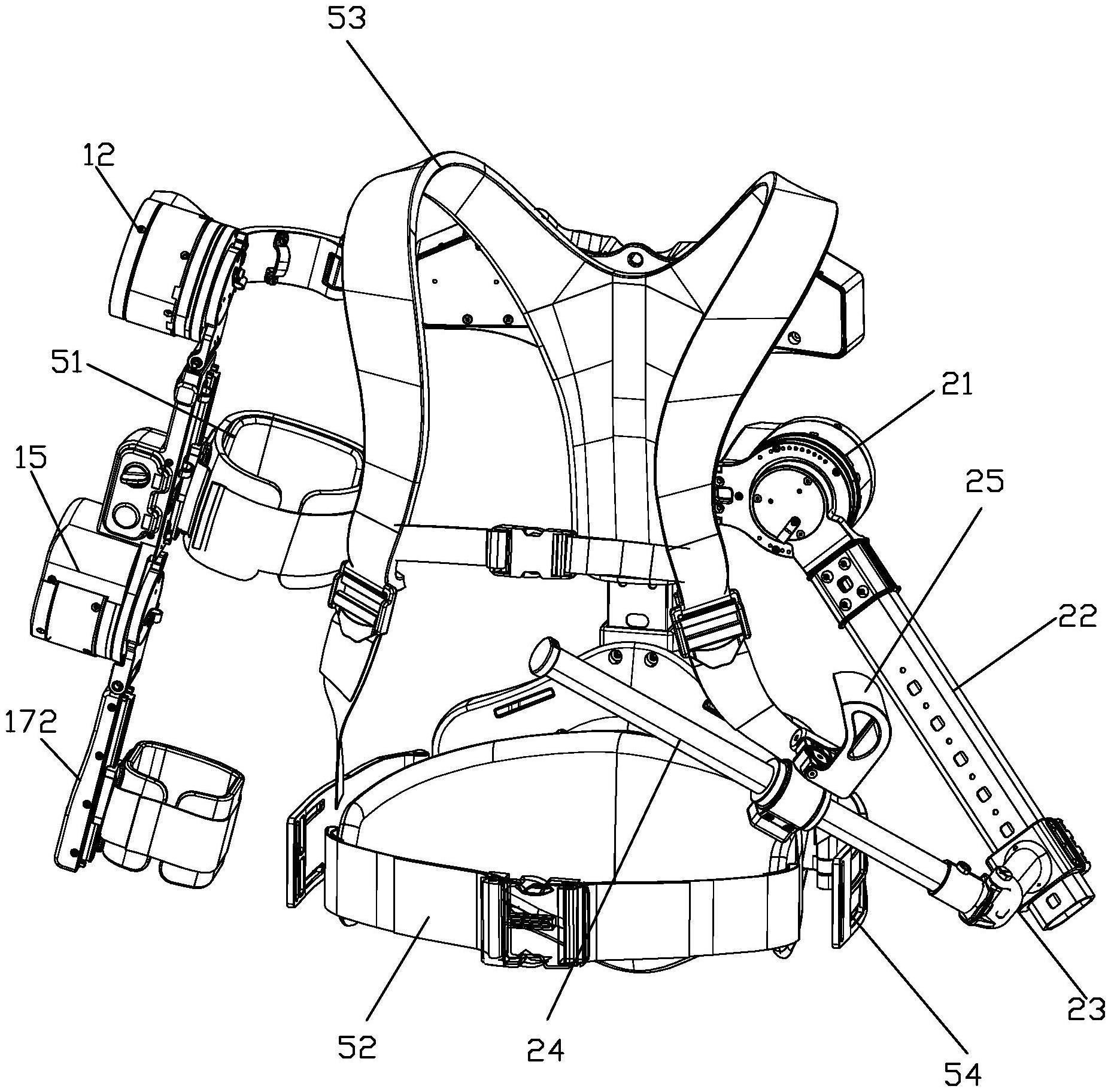
5、第二臂模块,包括第二臂电机、驱动杆、第二安装座和第二臂杆,该第二臂电机安装在背架部件,该第二臂电机传动连接驱动杆,该第二安装座装设在驱动杆,该第二臂杆转动连接第二安装座,该第二臂杆上安装有抓手,该抓手能相对第二臂杆滑动且绕第二臂杆转动,且抓手设下压部。
6、一实施例之中:该大臂部件通过外展转轴转动连接在第一转部,通过外展转轴使大臂部件能相对第一转部外展活动;该小臂部件通过内外转轴连接在第二转部,通过内外转轴使小臂部件能相对第二转部内收外展活动。
7、一实施例之中:该大臂部件包括大臂杆和能相对大臂杆滑动的大臂托板,该大臂杆连接第一转部,该肘电机安装在大臂杆;该小臂部件包括小臂杆和能相对小臂杆滑动的小臂托板,该小臂杆连接第二转部。
8、一实施例之中:该大臂杆设臂长调节机构,该臂长调节机构包括一滑接在大臂杆的调节杆,通过调节杆和大臂杆的滑动调节大臂长度,该大臂杆和调节杆分别连接第一转部和肘电机。
9、一实施例之中:该大臂部件安装有感知大臂运动位置的第一传感器,该小臂部件安装有感知小臂运动位置的第二传感器。
10、一实施例之中:该第二臂杆通过衬套连接抓手,该衬套下端安装有感知第二臂杆角度的第三传感器。
11、一实施例之中:该第二臂杆通过一个倾斜设置的受限转轴连接第二安装部。
12、一实施例之中:该背架模块包括壳体和背板,背板和壳体上下布置且通过身高调节机构连接在一起;该背板设肩宽调节机构,该肩宽调节机构包括能相对背板滑动的肩后滑块,该肩后滑块和第一安装座间通过肩后转轴连接在一起。
13、一实施例之中:还包括:
14、连接带模块,连接背架模块且通过连接带模块将背架模块连接在用户身上。
15、一实施例之中:还包括:
16、控制模块,连接肩电机、肘电机和第二臂电机。
17、本技术方案与背景技术相比,它具有如下优点:第一臂模块包含肩、肘电机等且用于完成右手臂的托举助力,第二臂模块包含第二臂电机等且用于完成左手臂的下压助力,则能通过下压和托举的配合举起长杆,实现单人操作的可能性,提升操作的便利性和安全性。
技术特征:
1.一种托举助力的外骨骼机器人,其特征在于:包括:
2.根据权利要求1所述的一种托举助力的外骨骼机器人,其特征在于:该大臂部件通过外展转轴转动连接在第一转部,通过外展转轴使大臂部件能相对第一转部外展活动;该小臂部件通过内外转轴连接在第二转部,通过内外转轴使小臂部件能相对第二转部内收外展活动。
3.根据权利要求1所述的一种托举助力的外骨骼机器人,其特征在于:该大臂部件包括大臂杆和能相对大臂杆滑动的大臂托板,该大臂杆连接第一转部,该肘电机安装在大臂杆;该小臂部件包括小臂杆和能相对小臂杆滑动的小臂托板,该小臂杆连接第二转部。
4.根据权利要求3所述的一种托举助力的外骨骼机器人,其特征在于:该大臂杆设臂长调节机构,该臂长调节机构包括一滑接在大臂杆的调节杆,通过调节杆和大臂杆的滑动调节大臂长度,该大臂杆和调节杆分别连接第一转部和肘电机。
5.根据权利要求1所述的一种托举助力的外骨骼机器人,其特征在于:该大臂部件安装有感知大臂运动位置的第一传感器,该小臂部件安装有感知小臂运动位置的第二传感器。
6.根据权利要求1所述的一种托举助力的外骨骼机器人,其特征在于:该第二臂杆通过衬套连接抓手,该衬套下端安装有感知第二臂杆角度的第三传感器。
7.根据权利要求1所述的一种托举助力的外骨骼机器人,其特征在于:该第二臂杆通过一个倾斜设置的受限转轴连接第二安装部。
8.根据权利要求1所述的一种托举助力的外骨骼机器人,其特征在于:该背架模块包括壳体和背板,背板和壳体上下布置且通过身高调节机构连接在一起;该背板设肩宽调节机构,该肩宽调节机构包括能相对背板滑动的肩后滑块,该肩后滑块和第一安装座间通过肩后转轴连接在一起。
9.根据权利要求1所述的一种托举助力的外骨骼机器人,其特征在于:还包括:
10.根据权利要求1所述的一种托举助力的外骨骼机器人,其特征在于:还包括:
技术总结
本技术公开了一种托举助力的外骨骼机器人,包括背架模块、第一臂模块和第二臂模块;第一臂模块包括第一安装座、肩电机、第一转部、大臂部件、肘电机、第二转部和小臂部件,用于完成右手臂的托举助力;第二臂模块,包括第二臂电机、驱动杆、第二安装座和第二臂杆,用于完成左手臂的下压助力;通过下压和托举的配合举起长杆,实现单人操作的可能性,提升操作的便利性和安全性。
技术研发人员:郭建忠,魏占水
受保护的技术使用者:北理兆殷智能科技(山东)有限公司
技术研发日:20230627
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!