一种组装机器人的夹持机构的制作方法
本技术涉及夹持机构,尤其涉及一种组装机器人的夹持机构。
背景技术:
1、机器人的夹持机构模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全。
2、但是,现有技术中的组装机器人的夹持机构在进行对物品进行夹持工作时,安装的夹具只能对某一物品进行夹持作用,物品更换时,需要拆卸重新安装另一套夹具,导致设备在进行工作时的效率较低,为此需要一种组装机器人的夹持机构。
技术实现思路
1、本实用新型的目的在于提供一种组装机器人的夹持机构,解决了组装机器人的夹持机构在进行对物品进行夹持工作时,安装的夹具只能对某一物品进行夹持作用,物品更换时,需要拆卸重新安装另一套夹具,导致设备在进行工作时的效率较低的问题。
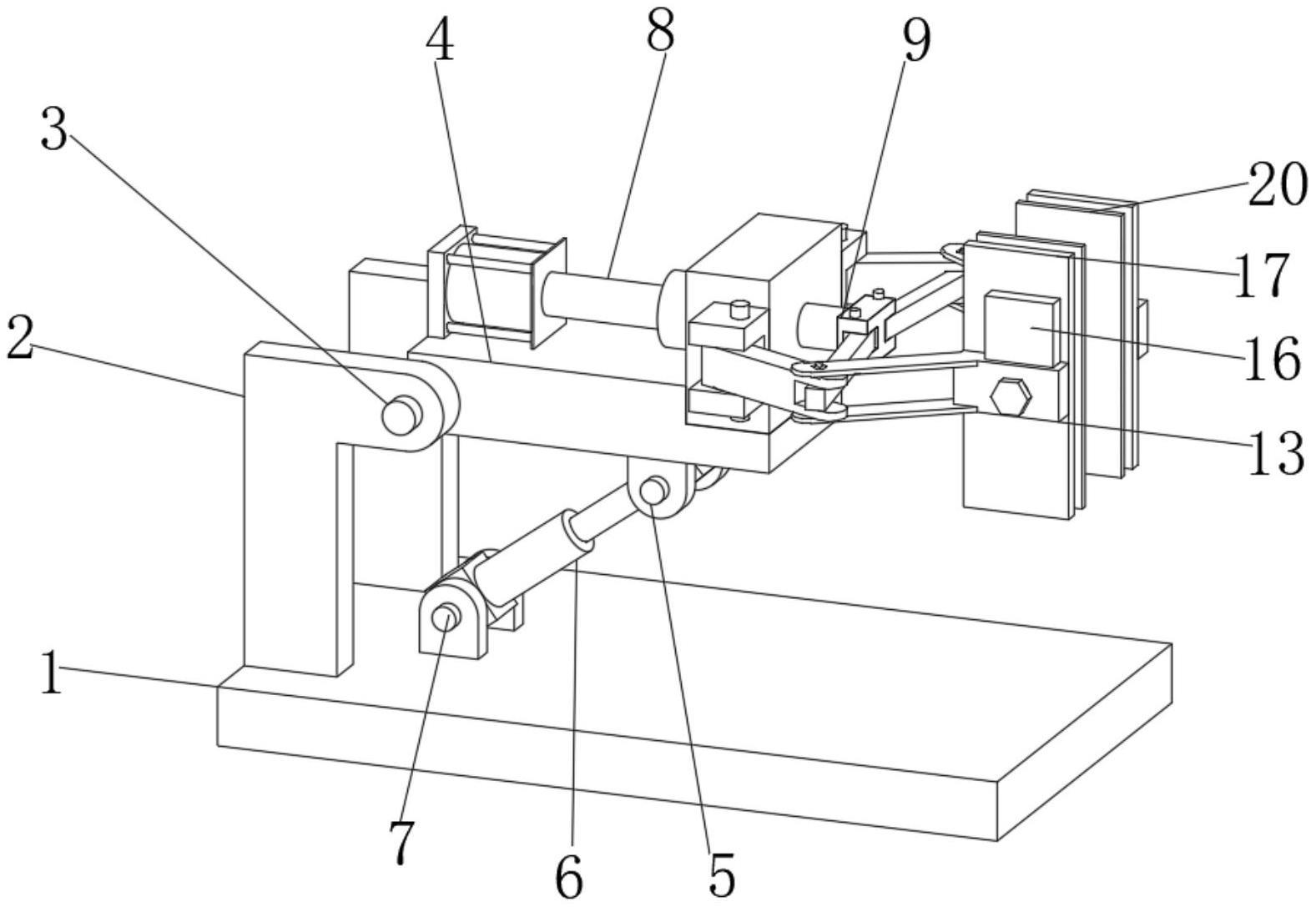
2、为实现上述目的,本实用新型提供如下技术方案:一种组装机器人的夹持机构,包括安装底座和设置在安装底座上方的连接机构,所述连接机构包括调节组件和夹持组件;
3、所述调节组件包括支撑座、连接轴、支撑板、第一转轴、第一液压杆和第二转轴,所述安装底座的左侧安装有支撑座,所述支撑座的内部安装有连接轴,所述连接轴的外表面安装有支撑板,所述支撑板的下端面安装有第一转轴,所述第一转轴的内部安装有第一液压杆,所述第一液压杆的末端安装有第二转轴;
4、所述夹持组件包括第二液压杆、连接座、第三转轴、连接杆、第四转轴、安装支架和第五转轴,所述支撑板的上端面安装有第二液压杆,所述第二液压杆的末端安装有连接座,所述连接座的内部安装有第三转轴,所述第三转轴的内部安装有连接杆,所述连接杆的末端安装有第四转轴,所述第四转轴的外表面安装有安装支架,所述安装支架的左端安装有第五转轴。
5、优选的,所述安装支架的右端开设有安装槽,所述安装槽的内部安装有安装板,所述安装板的侧壁安装有第一夹板,所述第一夹板的内壁固定连接有减震弹簧,所述减震弹簧的末端安装有第二夹板,所述减震弹簧的内圈安装有阻尼支杆。
6、优选的,所述支撑板通过第一转轴与第一液压杆构成转动结构,所述第一液压杆通过第二转轴与安装底座构成转动结构,所述支撑板通过连接轴与支撑座构成转动结构。
7、优选的,所述第二液压杆与连接座为固定连接,所述连接杆通过第三转轴与连接座构成转动结构。
8、优选的,所述安装支架通过第四转轴与连接杆构成转动结构,所述安装支架通过第五转轴与支撑板构成转动结构。
9、优选的,所述第一夹板通过安装板和安装槽与安装支架构成卡合结构。
10、优选的,所述第二夹板通过减震弹簧和阻尼支杆与第一夹板构成弹性结构。
11、与现有技术相比,本实用新型的有益效果是:
12、1、通过设置连接轴,安装的支撑板通过第一转轴与第一液压杆的伸缩作用时进行一定的转动工作,然后第一液压杆通过第二转轴与安装底座之间进行一定的转动工作,实现支撑板可以通过连接轴与支撑座之间进行一定的转动工作,进行角度的调节作用,便于进行夹持时可以角度的调节,提高在进行组装夹持的效率。
13、2、通过设置安装板,安装的第一夹板可以通过安装板和安装槽与安装支架之间进行一定的卡合连接,然后通过螺纹栓进行安装作用,便于对第一夹板进行一定的拆卸更换作用,提高设备的使用效率,根据需要进行更换使用。
技术特征:
1.一种组装机器人的夹持机构,包括安装底座(1)和设置在安装底座(1)上方的连接机构,其特征在于:所述连接机构包括调节组件和夹持组件;
2.根据权利要求1所述的一种组装机器人的夹持机构,其特征在于:所述安装支架(13)的右端开设有安装槽(15),所述安装槽(15)的内部安装有安装板(16),所述安装板(16)的侧壁安装有第一夹板(17),所述第一夹板(17)的内壁固定连接有减震弹簧(18),所述减震弹簧(18)的末端安装有第二夹板(20),所述减震弹簧(18)的内圈安装有阻尼支杆(19)。
3.根据权利要求1所述的一种组装机器人的夹持机构,其特征在于:所述支撑板(4)通过第一转轴(5)与第一液压杆(6)构成转动结构,所述第一液压杆(6)通过第二转轴(7)与安装底座(1)构成转动结构,所述支撑板(4)通过连接轴(3)与支撑座(2)构成转动结构。
4.根据权利要求1所述的一种组装机器人的夹持机构,其特征在于:所述第二液压杆(8)与连接座(9)为固定连接,所述连接杆(11)通过第三转轴(10)与连接座(9)构成转动结构。
5.根据权利要求1所述的一种组装机器人的夹持机构,其特征在于:所述安装支架(13)通过第四转轴(12)与连接杆(11)构成转动结构,所述安装支架(13)通过第五转轴(14)与支撑板(4)构成转动结构。
6.根据权利要求2所述的一种组装机器人的夹持机构,其特征在于:所述第一夹板(17)通过安装板(16)和安装槽(15)与安装支架(13)构成卡合结构。
7.根据权利要求2所述的一种组装机器人的夹持机构,其特征在于:所述第二夹板(20)通过减震弹簧(18)和阻尼支杆(19)与第一夹板(17)构成弹性结构。
技术总结
本技术公开了一种组装机器人的夹持机构,涉及夹持机构技术领域,现提出如下方案,包括安装底座和设置在安装底座上方的连接机构,所述连接机构包括调节组件和夹持组件;所述调节组件包括支撑座、连接轴、支撑板、第一转轴、第一液压杆和第二转轴,所述安装底座的左侧安装有支撑座,所述支撑座的内部安装有连接轴;通过设置连接轴,安装的支撑板通过第一转轴与第一液压杆的伸缩作用时进行一定的转动工作,然后第一液压杆通过第二转轴与安装底座之间进行一定的转动工作,实现支撑板可以通过连接轴与支撑座之间进行一定的转动工作,进行角度的调节作用,便于进行夹持时可以角度的调节,提高在进行组装夹持的效率。
技术研发人员:马翌轩
受保护的技术使用者:马翌轩
技术研发日:20230627
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!