一种旋转机械手臂
本技术涉及机械手相关,尤其涉及一种旋转机械手臂。
背景技术:
1、机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。
2、公开号为cn113084786a的发明专利公开了一种多自由度旋转的机械手臂,该发明通过滑块与滑槽滑动连接的方式可以使得转盘转动更稳定,通过将第三驱动电机的输出轴贯穿安装槽延伸至外部与螺纹套筒螺纹套筒连接的方式方便对横板的拆装。
3、现有技术虽结构简单,方便拆装维修,但仍然存在以下技术问题:
4、1、所使用的旋转机械手臂本来的功能是可以抓取左边工件后摆放在右边摆台上,但在实现左右旋转的过程中,因为机械气动的原因,手臂左右旋转到位时有抖动,造成定位有偏差;
5、2、在初期使用时,机械手臂比较灵活,且定位准确,但在长时间使用后,会导致旋转机构的定位效果逐渐变差,产生位置偏差,和造成工件摆放不正,影响下一个工序操作,不能准确定位到拿取和放置的位置,电气自动化行业由于元件较小,对位置的要求较为严格,更为严重的情况下甚至有可能会影响正常工作的使用,发生拿取不到,不能放置到正确位置的问题,使工序中断,进而为人们的使用带来不便。
技术实现思路
1、针对现有技术的不足,本实用新型提供如下技术方案:
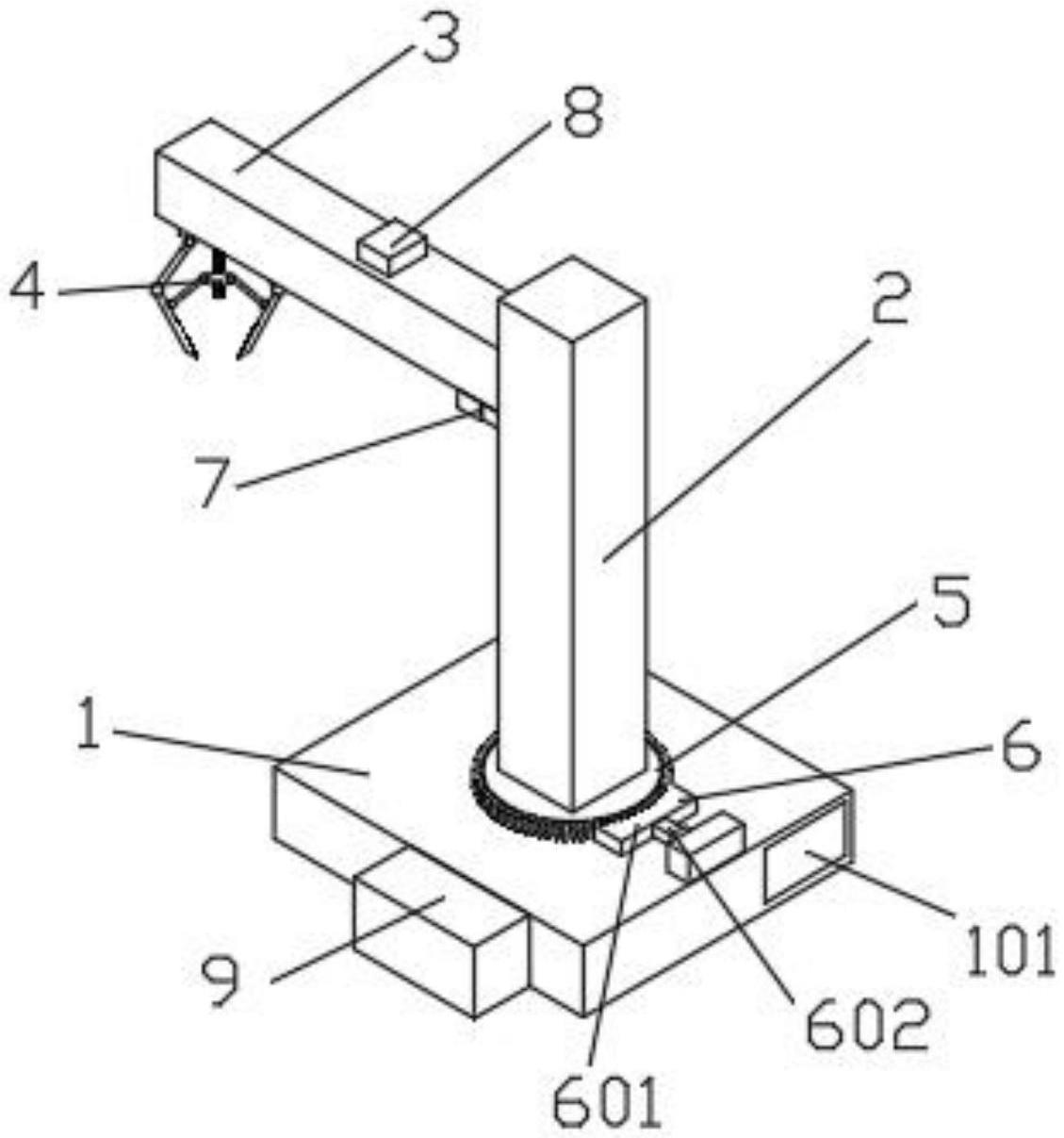
2、一种旋转机械手臂,包括支撑装置、传动装置和夹持装置,所述支撑装置包括支撑臂、横臂和底座,所述底座通过蜗轮蜗杆和转台与支撑臂连接,所述转台通过位于底座上方的转向限位组件进行限位,所述转向限位组件包括与转台接触配合的限位块,所述限位块通过第一伸缩块与气压泵连接;
3、所述支撑臂内侧设有开槽,所述开槽两侧设有限位孔,所述横臂通过第一连接块与支撑臂内的第一丝杆螺纹连接配合可以沿第一丝杆上下滑动,所述横臂与支撑臂接触部位设有高度限位组件,所述高度限位组件包括第二伸缩块,所述第二伸缩块前端设有限位轴,所述限位轴通过与支撑臂表面的限位孔配合,实现所述横臂的高度锁定;
4、所述横臂下侧设有开槽,所述横臂下方设有夹持组件,所述夹持组件通过第二连接块与横臂内的第二丝杆螺纹连接配合可以沿第二丝杆前后滑动,所述夹持组件通过螺栓来控制张合。
5、进一步的,所述转台边缘和限位块为锯齿啮合,所述支撑臂的内侧开槽处设有防尘板。
6、进一步的,所述第二丝杆通过轴承固定于横臂内壁,第二丝杆一端与电机连接。
7、进一步的,所述第一丝杆通过轴承固定于支撑臂内壁,第一丝杆一端与电机连接。
8、进一步的,所述蜗轮蜗杆通过轴承固定于底座内,所述蜗轮蜗杆的蜗杆一端连接电机。
9、进一步的,所述横臂上方设有气压泵,所述气压泵通过气管与高度限位组件连接。
10、与现有技术相比,本申请的技术方案具备以下有益效果:
11、1、本实用新型的旋转机械手臂通过蜗轮蜗杆实现机械手臂的旋转,在支撑臂和底座之间用齿轮状的转台连接,并设置转向限位组件,当机械手臂转动到指定位置时,通过气压泵控制第一伸缩块,让限位块与转台接触,从而实现机械手臂的锁定。蜗轮蜗杆的刚性设计可以提高机械臂转动时的稳定性和抗振能力,从而减少机械臂在转动时产生的抖动,且转向限位组件可以在机械手臂转动到位时进一步对机械手臂锁定,防止抖动,减小机械手臂的定位误差;
12、2、本实用新型的旋转机械手臂通过第一连接块和第一丝杆的螺纹连接配合把横臂和支撑臂连接在一起,且可以通过转动第一丝杆实现第一连接块上升或下降,从而实现横臂的上升和下降。通过设置高度限位组件,当横臂到达指定位置时,通过气压泵控制第二伸缩块使限位轴与支撑杆臂上的限位孔配合实现锁定,从而减小横臂上升下降时的抖动。第一丝杆的刚性设计可以提高横臂在上升下降时的稳定性和抗振能力,从而减少横臂在上升下降时产生的抖动;
13、3、本实用新型的旋转机械手臂通过在横臂内设置第二丝杆来控制夹持组件的前进和后退,以及通过螺栓控制夹持组件的开合,可以很好的减小夹持组件在夹取和定位时的抖动,解决了现有技术通过气压控制夹持组件时,抖动的问题。
技术特征:
1.一种旋转机械手臂,包括支撑装置、传动装置和夹持装置,其特征在于,所述支撑装置包括支撑臂、横臂和底座,所述底座通过蜗轮蜗杆和转台与支撑臂连接,所述转台通过位于底座上方的转向限位组件进行限位,所述转向限位组件包括与转台接触配合的限位块,所述限位块通过第一伸缩块与气压泵连接;
2.根据权利要求1所述一种旋转机械手臂,其特征在于,所述转台的边缘和限位块为锯齿啮合,所述支撑臂的内侧开槽处设有防尘板。
3.根据权利要求1所述一种旋转机械手臂,其特征在于,所述第二丝杆通过轴承固定于横臂内壁,第二丝杆一端与电机连接;所述第一丝杆通过轴承固定于支撑臂内壁,第一丝杆一端与电机连接。
4.根据权利要求1所述一种旋转机械手臂,其特征在于,所述蜗轮蜗杆通过轴承固定于底座内,所述蜗轮蜗杆的蜗杆一端连接电机。
5.根据权利要求1所述一种旋转机械手臂,其特征在于,所述横臂上方设有气压泵,所述气压泵通过气管与高度限位组件连接。
技术总结
本技术目的在于提出一种旋转机械手臂,涉及机械手领域。通过在底座内设置的蜗轮蜗杆刚性设计可以提高机械臂转动时的稳定性和抗振能力,从而减少机械臂在转动时产生的抖动,且转向限位组件可以在机械手臂转动到位时进一步对机械手臂锁定,防止抖动,减小机械手臂的定位误差;通过在支撑臂内设置的第一丝杆的刚性设计可以提高横臂在上升下降时的稳定性和抗振能力,且高度限位组件可以进一步锁定横臂位置,从而减少横臂在上升下降时产生的抖动;通过在横臂内设置的第二丝杆来控制夹持组件的前进和后退,以及通过螺栓控制夹持组件的开合,可以很好的减小夹持组件在夹取和定位时的抖动,解决了现有技术通过气压控制夹持组件时,抖动的问题。
技术研发人员:李江玲,王佩,黄雅迪,李凤,吕宇,刘小棠,舒服,舒可欣
受保护的技术使用者:成都市技师学院(成都工贸职业技术学院、成都市高级技工学校、成都铁路工程学校)
技术研发日:20230701
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!