一种码垛机械手
本技术属于机械手,具体涉及一种码垛机械手。
背景技术:
1、码垛机械手能将不同外形尺寸的包装货物,整齐、自动地码在托盘或生产线上等。为充分利用托盘的面积和码堆物料的稳定性,机器人具有物料码垛顺序、排列设定器。可满足从低速到高速,从包装袋到纸箱,从码垛一种产品到码垛多种不同产品。应用于产品搬运、码垛等,广泛应用于汽车、物流、家电、医药、食品饮料等不同领域。
2、目前国内已经有了多家的码垛机械手生产企业,这些企业的出现使得进口产品的价格下降很多,促进了码垛机械手的广泛应用,但是这些企业的产品在性能上与进口产品还有一定的差距,同时很多企业的产品的控制系统都是购买国外的,这就受制于国外。由于生产线繁重的工作需求,企业会引进昂贵的码垛机械手来减省工人、提高效率,提高产品品质、安全性好、提升企业形象。
3、目前搬运箱体的码垛机械手,通过多安装于机器人上,对于货箱的夹取,从而通过机械手完成对于货箱的搬运,单次往返只能够搬运一个箱子,码垛效率不高,容易造成流水线货物积压,降低流水线运货效率,实用性较低。
技术实现思路
1、本实用新型的目的在于提供一种码垛机械手,以解决上述背景技术中提出的问题。
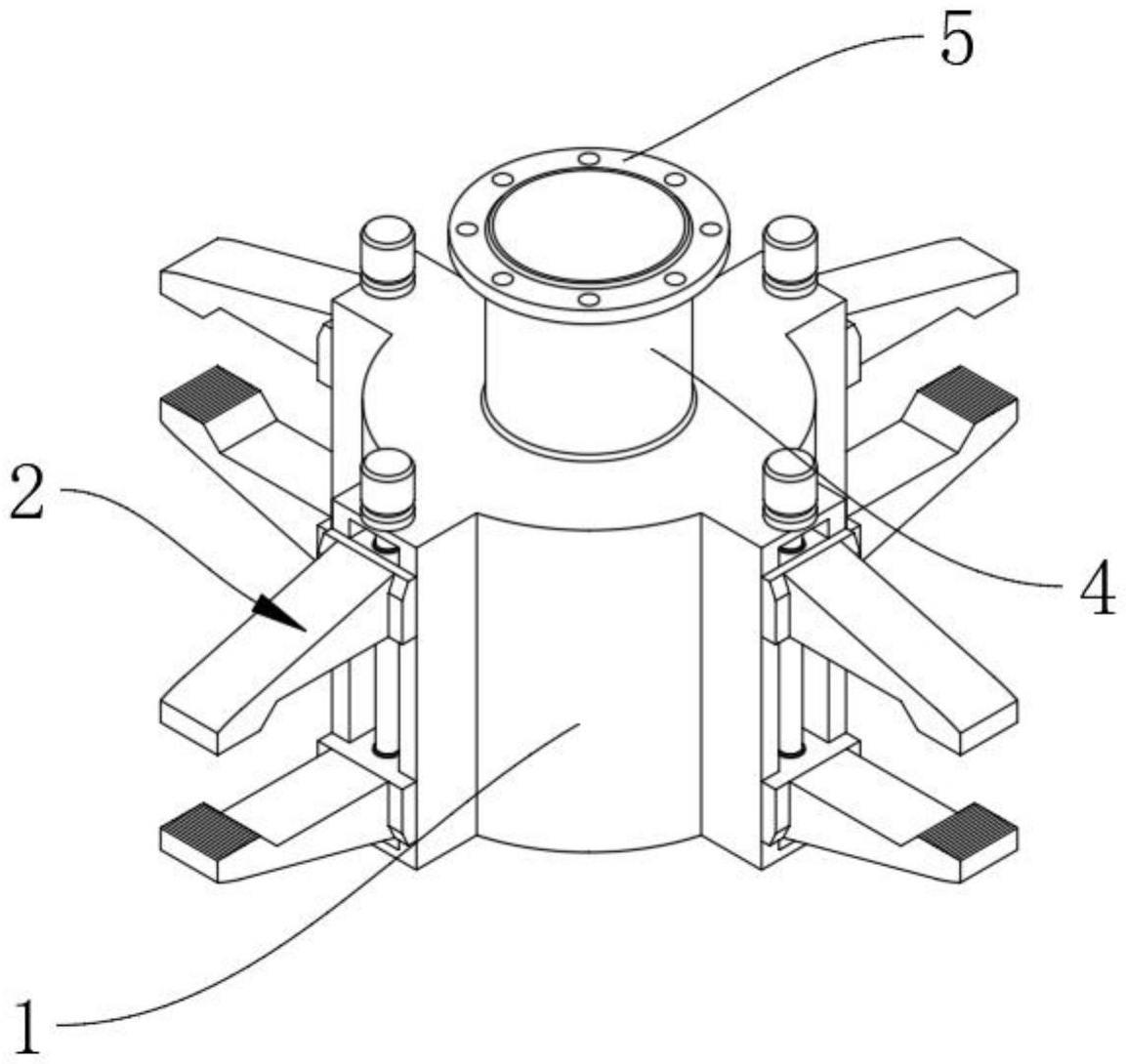
2、为实现上述目的,本实用新型提供如下技术方案:一种码垛机械手,包括安装座;
3、所述安装座的外缘面上呈环形阵列构造有多个用于夹持箱体的夹持组件;
4、所述夹持组件包括支撑座,所述支撑座焊接固定于安装座的外缘面一侧,且支撑座远离安装座的一侧居中开设有滑槽,所述滑槽内顶部和底部之间转动安装有丝杆,且丝杆延伸出滑槽的一端连接有固定于支撑座顶端的伺服电机,所述丝杆的外缘面两侧均螺纹配合安装有夹持爪。
5、优选的,所述夹持爪包括滑台,所述滑台的一侧居中构造有滑块,且滑块滑动设置于滑槽内。
6、优选的,所述滑块的顶端居中开设有贯穿孔,且贯穿孔内固定安装有内丝轴筒,所述丝杆螺纹配合安装于内丝轴筒内。
7、优选的,所述滑台远离滑块的一侧居中构造有夹爪主体,且夹爪主体的一端开设有防滑齿。
8、优选的,所述安装座的顶端居中开设有通槽,且通槽内焊接固定安装有固定柱。
9、优选的,所述固定柱的外缘面顶端焊接固定安装有连接盘,且连接盘的顶端呈环形阵列开设有多个圆孔。
10、本实用新型的技术效果和优点:该码垛机械手,得益于安装座上多个夹持组件的设置,通过将机械手固定于机器人上,由机器人驱动安装座转动,并启动伺服电机,通过伺服电机带动丝杆转动,由丝杆使得两个夹持爪相互靠近,从而完成对于货箱的夹持固定,固定完成后,通过机器人驱动安装座再次转动,通过另一夹持爪再次对货箱进行夹持固定,大大提高了码垛的效率,避免了流水线货物积压的情况出现,提高了流水线的运货效率,实用性较强;
11、得益于夹持爪的设置,通过设置有防滑齿的夹爪主体配合构造有滑块的滑台完成对于货箱的夹持,由于夹爪主体上防滑齿的开设,大大提高了夹持的稳定性,实用性较强。
技术特征:
1.一种码垛机械手,包括安装座(1);
2.根据权利要求1所述的一种码垛机械手,其特征在于:所述夹持爪(3)包括滑台(301),所述滑台(301)的一侧居中构造有滑块(302),且滑块(302)滑动设置于滑槽内。
3.根据权利要求2所述的一种码垛机械手,其特征在于:所述滑块(302)的顶端居中开设有贯穿孔,且贯穿孔内固定安装有内丝轴筒(303),所述丝杆(202)螺纹配合安装于内丝轴筒(303)内。
4.根据权利要求3所述的一种码垛机械手,其特征在于:所述滑台(301)远离滑块(302)的一侧居中构造有夹爪主体(304),且夹爪主体(304)的一端开设有防滑齿(305)。
5.根据权利要求1所述的一种码垛机械手,其特征在于:所述安装座(1)的顶端居中开设有通槽,且通槽内焊接固定安装有固定柱(4)。
6.根据权利要求5所述的一种码垛机械手,其特征在于:所述固定柱(4)的外缘面顶端焊接固定安装有连接盘(5),且连接盘(5)的顶端呈环形阵列开设有多个圆孔。
技术总结
本技术公开了一种码垛机械手,包括安装座,所述安装座的外缘面上呈环形阵列构造有多个用于夹持箱体的夹持组件,所述夹持组件包括支撑座,所述支撑座焊接固定于安装座的外缘面一侧,且支撑座远离安装座的一侧居中开设有滑槽,所述滑槽内顶部和底部之间转动安装有丝杆,且丝杆延伸出滑槽的一端连接有固定于支撑座顶端的伺服电机,所述丝杆的外缘面两侧均螺纹配合安装有夹持爪,所述夹持爪包括滑台,所述滑台的一侧居中构造有滑块,且滑块滑动设置于滑槽内。该码垛机械手,可通过转动夹持多个货箱,大大提高了码垛的效率,避免了流水线货物积压的情况出现,提高了流水线的运货效率,实用性较强。
技术研发人员:邵青伟,于其龙,冯亚磊,穆跃升,王鑫悦
受保护的技术使用者:沈阳科技学院
技术研发日:20230703
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!