一种三截机械手的制作方法
本技术涉及机械手,具体是一种三截机械手。
背景技术:
1、机械手臂就是能够接受指令,精确地定位到三维或二维空间上的某一点进行作业的装置。
2、机械手是最早出现的工业机器人,它可代替人的繁重劳动以实现生产的机械化和自动化。
3、现有的机械手装置参考专利文件cn217669408u,该专利文件中提出的装置能够有效的对机械手的移动进行测量,提高机械手移动的精度,但是在实际的应用中发现单截式或两截式的机械手臂受到其本身结构的限制,灵活性较差,角度调节范围较小,不利于进行生产;为此,我们提供了一种三截机械手解决以上问题。
技术实现思路
1、本实用新型的目的就是为了弥补现有技术的不足,提供了一种三截机械手,该装置不仅能够多角度调节机械臂的角度,灵活性较高,而且还能够对物体进行有效的夹持。
2、为实现上述目的,本实用新型提供如下技术方案:一种三截机械手,包括底板,所述底板的上方固定连接有伺服电机一,所述伺服电机一的输出轴端固定连接有机械臂组一,所述机械臂组一的上端转动连接有机械臂组二,所述机械臂组二的上端转动连接有机械臂组三,所述底板的上方设置有固定机构,所述固定机构包括与所述机械臂组三的外表面转动连接的壳体,所述壳体的内壁转动连接有双向螺纹杆,所述双向螺纹杆的一端固定连接有伺服电机二,所述双向螺纹杆的外表面螺纹连接有两个相对称的夹板。
3、进一步的,所述机械臂组一的下端固定连接有支撑板,所述支撑板的底面固定连接有四个支撑柱,四个所述支撑柱的底面均转动连接有滚珠,通过支撑板、支撑柱和滚珠之间的相互配合设置能够对机械臂组一进行支撑,对伺服电机一受到的压力进行缓冲,避免了长时间使用对伺服电机一造成损坏。
4、进一步的,所述底板的外表面开设有四个安装孔,所述安装孔的外轮廓为圆形,设置安装孔能够对机械手进行安装,便于将机械手安装到合适的位置。
5、进一步的,两个所述夹板相互靠近的一侧面均固定连接有防护垫,所述防护垫与所述夹板相适配,设置防护垫能够在对物体进行固定的时候进行缓冲,避免将物体夹坏,有效提高了该装置的实用性。
6、进一步的,所述壳体的内壁固定连接有轴承,所述轴承与所述双向螺纹杆相适配,设置轴承能够对双向螺纹杆进行限位,避免双向螺纹杆在转动的过程中产生晃动的情况发生,有效提高了该装置的稳定性。
7、进一步的,所述双向螺纹杆的外表面固定连接有限位块,所述限位块的外轮廓为长方体,设置限位块能够对夹板进行限位,避免夹板在移动的过程中脱落双向螺纹杆,有效提高了该装置的可靠性。
8、进一步的,所述壳体的内壁固定连接有两个相对称的限位杆,两个所述限位杆的外表面均与两个所述夹板两端的预留孔滑动连接,设置限位杆能够对夹板进行限位,避免夹板在移动的过程中对壳体的内壁造成磨损,使夹板更加稳定的移动,提高了该装置的稳定性。
9、与现有技术相比,该三截机械手具备如下有益效果:
10、1、本实用新型通过底板、伺服电机一、机械臂组一、机械臂组二和机械臂组三之间的相互配合设置能够使该装置进行多角度和多方位的调节,有效提高了该装置的灵活性极大满足了生产的需求,自动化程度较高,有利于生产,提高产能,减少人工,提高对资源的利用率,通过在机械臂组三远离机械臂组二的一端设置固定机构能够对物体进行有效的固定,以便于该装置在进行作业时候,代替人从事繁重工作,单调的重复劳动,提高劳动生产率,保证产品质量。
11、2、本实用新型通过支撑板、支撑柱和滚珠之间的相互配合设置能够对机械臂组一进行支撑,对伺服电机一受到的压力进行缓冲,避免了长时间使用对伺服电机一造成损坏,通过设置安装孔能够对机械手进行安装,便于将机械手安装到合适的位置,通过设置防护垫能够在对物体进行固定的时候进行缓冲,避免将物体夹坏,有效提高了该装置的实用性,通过设置轴承能够对双向螺纹杆进行限位,避免双向螺纹杆在转动的过程中产生晃动的情况发生,有效提高了该装置的稳定性,通过设置限位块能够对夹板进行限位,避免夹板在移动的过程中脱落双向螺纹杆,有效提高了该装置的可靠性,通过设置限位杆能够对夹板进行限位,避免夹板在移动的过程中对壳体的内壁造成磨损,使夹板更加稳定的移动,提高了该装置的稳定性。
技术特征:
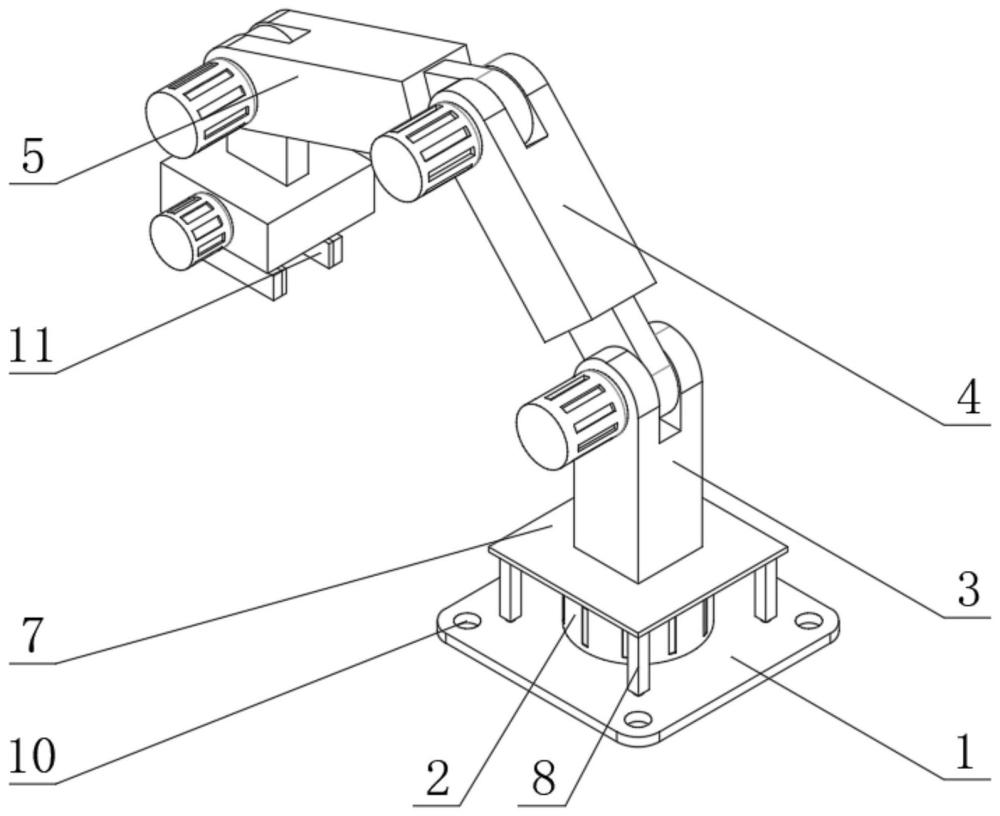
1.一种三截机械手,包括底板(1),其特征在于:所述底板(1)的上方固定连接有伺服电机一(2),所述伺服电机一(2)的输出轴端固定连接有机械臂组一(3),所述机械臂组一(3)的上端转动连接有机械臂组二(4),所述机械臂组二(4)的上端转动连接有机械臂组三(5),所述底板(1)的上方设置有固定机构(6),所述固定机构(6)包括与所述机械臂组三(5)的外表面转动连接的壳体(601),所述壳体(601)的内壁转动连接有双向螺纹杆(603),所述双向螺纹杆(603)的一端固定连接有伺服电机二(602),所述双向螺纹杆(603)的外表面螺纹连接有两个相对称的夹板(604)。
2.根据权利要求1所述的一种三截机械手,其特征在于:所述机械臂组一(3)的下端固定连接有支撑板(7),所述支撑板(7)的底面固定连接有四个支撑柱(8),四个所述支撑柱(8)的底面均转动连接有滚珠(9)。
3.根据权利要求1所述的一种三截机械手,其特征在于:所述底板(1)的外表面开设有四个安装孔(10),所述安装孔(10)的外轮廓为圆形。
4.根据权利要求1所述的一种三截机械手,其特征在于:两个所述夹板(604)相互靠近的一侧面均固定连接有防护垫(11),所述防护垫(11)与所述夹板(604)相适配。
5.根据权利要求1所述的一种三截机械手,其特征在于:所述壳体(601)的内壁固定连接有轴承(12),所述轴承(12)与所述双向螺纹杆(603)相适配。
6.根据权利要求1所述的一种三截机械手,其特征在于:所述双向螺纹杆(603)的外表面固定连接有限位块(13),所述限位块(13)的外轮廓为长方体。
7.根据权利要求1所述的一种三截机械手,其特征在于:所述壳体(601)的内壁固定连接有两个相对称的限位杆(14),两个所述限位杆(14)的外表面均与两个所述夹板(604)两端的预留孔滑动连接。
技术总结
本技术公开了一种三截机械手,涉及机械手技术领域,包括底板,所述底板的上方固定连接有伺服电机一,所述伺服电机一的输出轴端固定连接有机械臂组一,所述机械臂组一的上端转动连接有机械臂组二,所述机械臂组二的上端转动连接有机械臂组三。本技术能够底板、伺服电机一、机械臂组一、机械臂组二和机械臂组三之间配合能够使该装置进行多角度和多方位的调节,有效提高了该装置的灵活性极大满足了生产的需求,自动化程度较高,有利于生产,提高产能,减少人工,提高对资源的利用率,通过在机械臂组三远离机械臂组二的一端设置固定机构能够对物体进行有效的固定,以便于该装置在进行作业时候,代替人从事繁重工作。
技术研发人员:何朝波
受保护的技术使用者:何朝波
技术研发日:20230712
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!