一种用于航天器维护工装的位姿模拟装置的制作方法
本技术涉及航天设备,具体涉及一种用于航天器维护工装的位姿模拟装置。
背景技术:
1、目前,航天器维护工装是专门设计和用于航天器维护和修理过程中的设备和工具。它们旨在帮助航天工程师和技术人员执行维护任务,确保航天器的正常运行和长时间的可靠性,
2、航天器维护工装的主要提供维护和修理,测试和检测航天器性能的工装和设备,同时还为工作人员提供操作和维修过程中的安全保障,因此,航天器维护工装是不可或缺的设备和工具,用于支持航天器的维护和修复工作,提供了必要的设备、装备和支持,确保航天器在运行期间和维护期间的安全和可靠性。
3、因此,航天器的维护工装同样需要保证其自身的位姿和操作,以及活动的可达性和可操作性,需要一种能够在地面环境下针对维护工装的模拟装置。
技术实现思路
1、针对现有技术存在的不足,本实用新型的目的在于提供一种用于航天器维护工装的位姿模拟装置。
2、本实用新型的上述技术目的是通过以下技术方案得以实现的:一种用于航天器维护工装的位姿模拟装置,包括:
3、移动平台,其上设有用于提供平移和转向动力的驱动机构和麦克纳姆轮;
4、升降机构,布置在移动平台上,并提供竖向动作的驱动力;
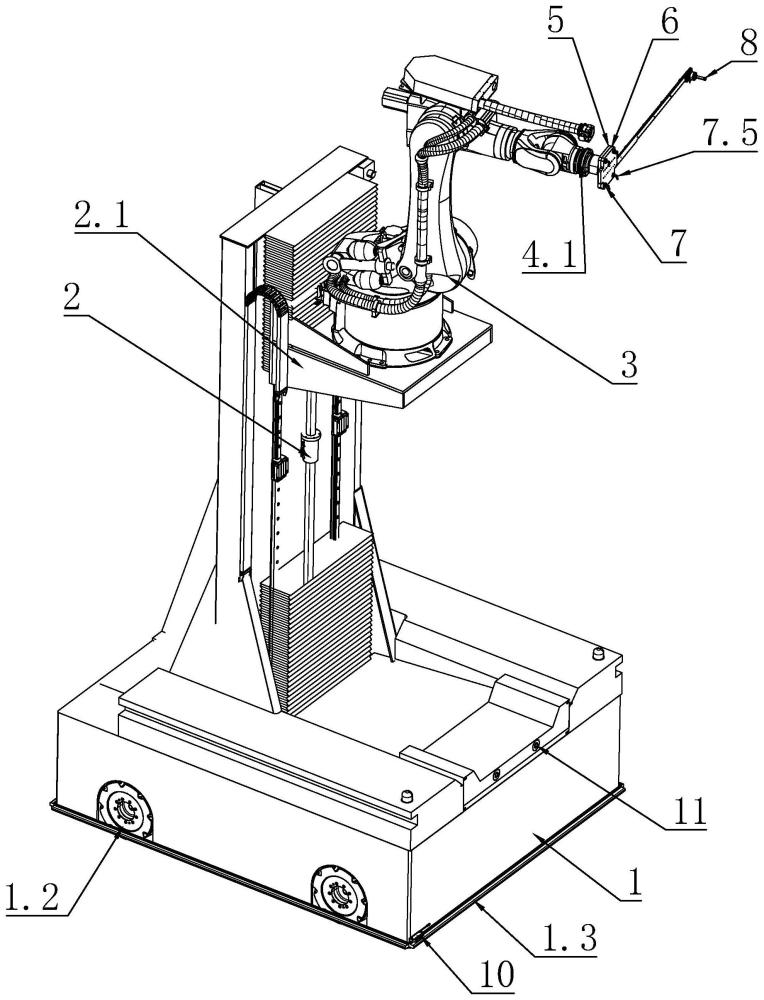
5、搭载平台,设置在升降机构的动作末端,且所述搭载平台上设置有机械手,所述机械手的执行末端固定有第一安装板,所述第一安装板通过快换组件可拆卸的连接有第二安装板,所述第二安装板用于连接维护工装,以驱动维护工装在航天器上的待维护位置并模拟维护工装的工作位姿。
6、进一步,还包括与模拟装置构成控制连接的控制器,所述控制器包括空间信息储存单元,以及至少连接于执行末端的位置传感单元,所述空间信息储存单元内储存有以航天器为基准构件的空间坐标系,以及执行末端的初始位置信息,所述位置传感单元连接于执行末端并传输和记录当前空间位置信息。
7、进一步,所述执行末端一侧延伸有设有一控制按钮,所述控制按钮与控制器连接,以驱使所述执行末端或模拟装置回到初始位置。
8、进一步,所述移动平台底部设有调平组件,所述调平组件包括内置于移动平台底部的若干个驱动缸,所述驱动缸的动作端抵接于地面,并驱使移动平台保持水平。
9、进一步,所述快换组件包括构成在第二安装板内的安装座,螺设在安装座内的活动杆,以及被约束在安装座内的钢球,所述活动杆上设有斜顶面,所述斜顶面随活动杆相对安装座移动,并允许钢球收容至安装座内,或挤压钢球伸出至安装座外侧,所述第一安装板内设有用于承接钢球伸出部分的止挡面。
10、进一步,所述移动平台的相对角设置有激光避障单元,所述激光避障单元与控制器连接,以控制移动平台减速或停止。
11、进一步,所述机械手上设置有六维传感器和力反馈装置。
12、进一步,所述移动平台的前端还设有超声波测距单元。
13、进一步,所述移动平台的底部设置有安全触边,所述安全触边环绕移动平台设置,且所述激光避障单元和/或超声波测距单元均被设置在安全触边在移动平台外侧所构成的安全区域以内。
14、进一步,所述移动平台通过激光避障单元和超声波测距单元在其两侧形成第一减速控制区,在其前方形成减速停止区,在减速停止区前方形成第二减速控制区,并在第一减速控制区和第二减速控制区内被设置为触发减速到预期速度,在减速停止区内被设置为触发减速至停止。
15、与现有技术相比,本实用新型具有以下优点和有益效果:本实用新型通过在地面环境下配置一种用于航天器维护工装的位姿模拟装置,为航天员在轨维修时的位姿和操作提供了模拟,从而验证维修活动的可达性和可操作性,实现航天器的圆周表面的可达性验证,以及利用机械手上的六维传感器和力反馈器达到柔顺装配的应用场景;
16、本实用新型的一种用于航天器维护工装的位姿模拟装置,通过由麦克纳姆轮驱动的移动平台实现装置无死角的全向行走,通过升降机构和机械手扩大活动范围,并结合机械手的力反馈器和六维传感器,实现执行末端的流畅顺滑动作,以对空间内位置的行走和动作进行姿态模拟,并且,移动平台通过激光避障单元和超声波测距单元,及其周侧的安全触边极大程度上提高安全性;
17、在操作过程中,通过快换组件实现待测维护工装的快速更换,操作方便快捷。
技术特征:
1.一种用于航天器维护工装的位姿模拟装置,其特征在于,包括:
2.如权利要求1所述的一种用于航天器维护工装的位姿模拟装置,其特征在于:还包括与模拟装置(100)构成控制连接的控制器(15),所述控制器(15)包括空间信息储存单元(16),以及至少连接于执行末端(4.1)的位置传感单元(17),所述空间信息储存单元(16)内储存有以航天器为基准构件的空间坐标系,以及执行末端(4.1)的初始位置信息,所述位置传感单元(17)连接于执行末端(4.1)并传输和记录当前空间位置信息。
3.如权利要求1所述的一种用于航天器维护工装的位姿模拟装置,其特征在于:所述执行末端(4.1)一侧延伸有设有一控制按钮(8),所述控制按钮(8)与控制器(15)连接,以驱使所述执行末端(4.1)或模拟装置(100)回到初始位置。
4.如权利要求1所述的一种用于航天器维护工装的位姿模拟装置,其特征在于:所述移动平台(1)底部设有调平组件,所述调平组件包括内置于移动平台(1)底部的若干个驱动缸(9),所述驱动缸(9)的动作端抵接于地面,并驱使移动平台(1)保持水平。
5.如权利要求1所述的一种用于航天器维护工装的位姿模拟装置,其特征在于:所述快换组件(7)包括构成在构成在第二安装板(6)内的安装座(7.1),螺设在安装座(7.1)内的活动杆(7.2),以及被约束在安装座(7.1)内的钢球(7.3),所述活动杆(7.2)上设有斜顶面(7.23),所述斜顶面(7.23)随活动杆(7.2)相对安装座(7.1)移动,并允许钢球(7.3)收容至安装座(7.1)内,或挤压钢球(7.3)伸出至安装座(7.1)外侧,所述第一安装板(5)内设有用于承接钢球(7.3)伸出部分的止挡面(5.1)。
6.如权利要求1所述的一种用于航天器维护工装的位姿模拟装置,其特征在于:所述移动平台(1)的相对角设置有激光避障单元(10),所述激光避障单元(10)与控制器(15)连接,以控制移动平台(1)减速或停止。
7.如权利要求1所述的一种用于航天器维护工装的位姿模拟装置,其特征在于:所述机械手(3)上设置有六维传感器和力反馈装置。
8.如权利要求6所述的一种用于航天器维护工装的位姿模拟装置,其特征在于:所述移动平台(1)的前端还设有超声波测距单元(11)。
9.如权利要求6所述的一种用于航天器维护工装的位姿模拟装置,其特征在于:所述移动平台(1)的底部设置有安全触边(1.3),所述安全触边(1.3)环绕移动平台(1)设置,且所述激光避障单元(10)和/或超声波测距单元(11)均被设置在安全触边(1.3)在移动平台(1)外侧所构成的安全区域以内。
10.如权利要求8所述的一种用于航天器维护工装的位姿模拟装置,其特征在于:所述移动平台(1)通过激光避障单元(10)和超声波测距单元(11)在其两侧形成第一减速控制区(12),在其前方形成减速停止区(13),在减速停止区(13)前方形成第二减速控制区(14),并在第一减速控制区(12)和第二减速控制区(14)内被设置为触发减速到预期速度,在减速停止区(13)内被设置为触发减速至停止。
技术总结
本技术公开了一种用于航天器维护工装的位姿模拟装置,包括:移动平台,其上设有用于提供平移和转向动力的驱动机构和麦克纳姆轮;升降机构,布置在移动平台上,并提供竖向动作的驱动力;搭载平台,设置在升降机构的动作末端,且所述搭载平台上设置有机械手,所述机械手的执行末端固定有第一安装板,所述第一安装板通过快换组件可拆卸的连接有第二安装板,所述第二安装板用于连接维护工装,以驱动维护工装在航天器上的待维护位置并模拟维护工装的工作位姿,在地面环境下针对维护工装进行模拟。
技术研发人员:李翔,徐坚磊,鞠立涛,范俊伟,宋子良,吴意
受保护的技术使用者:浙江航工智能科技有限公司
技术研发日:20230810
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!