一种基于协作机器人的档案机械手设备的制作方法
本申请涉及库房档案出库,尤其是涉及一种基于协作机器人的档案机械手设备。
背景技术:
1、目前,在智能化无人档案的库房中已引入悬臂机械手,大大提高了档案存取的效率和稳定性,采用开放式档案架,由机械手来完成档案的存取操作。
2、存档案时,将档案打上标签,通过识别档案的标签信息,传送装置将存入的档案传送至对应的档案架处,由机械手抓取档案,实现档案自动上架。取档案时,通过识别档案的存放位置及标签信息,机械手抓取目标档案,放置于传送装置,传送装置将档案传送至取档口处,由工作人员至取档口处取走档案,实现档案自动下架。
3、针对上述相关技术,若要存取多个档案,机械手需要一一的进行夹取,首先移动至需要夹取的第一个档案处,然后将该档案放于传送装置上,然后再移动至下一需要夹取的档案处,然后在将档案放于传送装置上,其夹取档案的效率较低。
技术实现思路
1、为了提高夹取档案的效率,本申请提供一种基于协作机器人的档案机械手设备。
2、本申请提供一种基于协作机器人的档案机械手设备,采用如下的技术方案:
3、一种基于协作机器人的档案机械手设备,包括位于档案架外部的行走架,所述行走架上滑动连接有夹存部,夹存部的一侧设有暂存箱,暂存箱宽度方向的一侧开口设置且设为开口部,夹存部竖直滑动连接有机械手本体,机械手本体远离夹存部的一端设有用于托夹档案的托夹部。
4、通过采用上述技术方案,在取若干档案时,行走架上的机械手移动,移动至目标档案处,机械手带动托夹部向档案的位置靠近,托夹部将档案夹起,然后通过机械手带动托夹部继续移动,托夹部进入至暂存箱的内部,然后托夹部取消对档案的固定,档案被放置与暂存箱内,然后机械手即可取下一档案;将待取档案均置于暂存箱内,然后即可操纵夹存部向传送装置的位置移动,然后再利用机械手和托夹部相配合,将档案一一置于传送装置上完成档案的取出,夹取档案的效率较高。
5、可选的,所述暂存箱内等间距设有若干水平分隔板,若干水平分隔板的上端部均竖直设有竖直分隔板,竖直分隔板与水平分隔板相互垂直设置,竖直分隔板位于对应的水平分隔板的中心处,若干水平板与竖直板将暂存箱分隔形成若干暂存盒。
6、通过采用上述技术方案,机械手带动托夹部进行移动,托夹部将档案夹起后,将档案夹至暂存盒处放下,进而提高档案的存放数量,也可分类存放待取档案。
7、可选的,所述竖直分隔板高度方向的两侧均设有导向部,导向部均由外至内倾斜设置,同一分隔板两侧的导向部沿竖直方向相互对称设置。
8、通过采用上述技术方案,托夹部将档案朝向某一暂存盒内塞入时,若档案与导向部接触,随着机械手本体继续移动托夹部,档案会沿着导向部的倾斜角度向暂存盒内部进行移动,档案可更快的进入至暂存盒内部,进一步的提高档案的夹取效率。
9、可选的,所述托夹部包括用于夹持档案的电夹,托夹部向下方延伸有延伸杆,托夹部包括用于托住档案的托板,托板与延伸板相互垂直设置且固定连接,托板位于电夹的下方,托板远离延伸杆的一端设有插入部,插入部由上至下倾斜设置,插入部的下端部位于最低处。
10、通过采用上述技术方案,在夹取目标档案时,机械手本体带动托板向靠近目标档案的方向移动,插入部和电夹均插入至档案架内,插入部插入至档案的下方,然后即可操纵机械手本体即可上升,电夹夹紧,托板将档案托起,电夹将档案夹住,进而提高夹取档案的稳定性,也可提高档案的夹取效率。
11、可选的,若干所述竖直分隔板的高度小于电夹与托板间的距离。
12、通过采用上述技术方案,在夹取暂存箱内的档案时,通过竖直滑动机械手本体来调整电夹的高度,将电夹移动至档案的上端部即可,然后即可通过机械手本体带动电机进行移动,将电夹插入至暂存箱的内部,然后即可操纵电夹将档案夹起,进而提高档案的夹取效率。
13、可选的,所述水平分隔板的上端部均设有若干用于架起档案的架起部,若干架起部位于竖直分隔板宽度方向的两侧。
14、通过采用上述技术方案,在电夹插入至暂存盒内的同时,托板也进入至暂存盒内部,托板插入至架起部内,然后通过滑动机械手本体,托板将档案托起,电夹将档案夹住,进而提高取出暂存盒内的档案的稳定性,也可提高档案的夹取效率。
15、可选的,所述架起部包括两根架起板,两根架起板分别位于暂存盒长度方向的两端,两根架起板均位于暂存盒内,两根架起板间形成插入通道,插入通道的宽度大于托板的宽度。
16、通过采用上述技术方案,在取出暂存盒内的档案时,托板可插入至插入通道的内部,然后即可通过竖直滑动机械手本体,进而带动托板向上方移动,进而将档案托起,进而提高取出暂存盒内档案的稳定性,也可提高档案的夹取效率。
17、可选的,所述架起板靠近开口部的位置设有导向部二,导向部二由外至内倾斜设置,架起板与上方的对应导向部一的倾斜角度相同。
18、通过采用上述技术方案,夹存部带动托板向插入通道内移动时,若托板与导向部二接触,可通过利用机械手本体来微调托板的位置即可将托板插入至插入通道的内部,进而提高托板进入插入通道内部的便利性,进而提高档案的夹取效率。
19、综上所述,本申请包括以下至少一种有益技术效果:
20、1.在取若干档案时,行走架上的机械手移动,移动至目标档案处,机械手带动托夹部向档案的位置靠近,托夹部将档案夹起,然后通过机械手带动托夹部继续移动,托夹部进入至暂存箱的内部,然后托夹部取消对档案的固定,档案被放置与暂存箱内,然后机械手即可取下一档案;将待取档案均置于暂存箱内,然后即可操纵夹存部向传送装置的位置移动,然后再利用机械手和托夹部相配合,将档案一一置于传送装置上完成档案的取出,夹取档案的效率较高;
21、2.在夹取目标档案时,机械手本体带动托板向靠近目标档案的方向移动,插入部和电夹均插入至档案架内,插入部插入至档案的下方,然后即可操纵机械手本体即可上升,电夹夹紧,托板将档案托起,电夹将档案夹住,进而提高夹取档案的稳定性,也可提高档案的夹取效率。
技术特征:
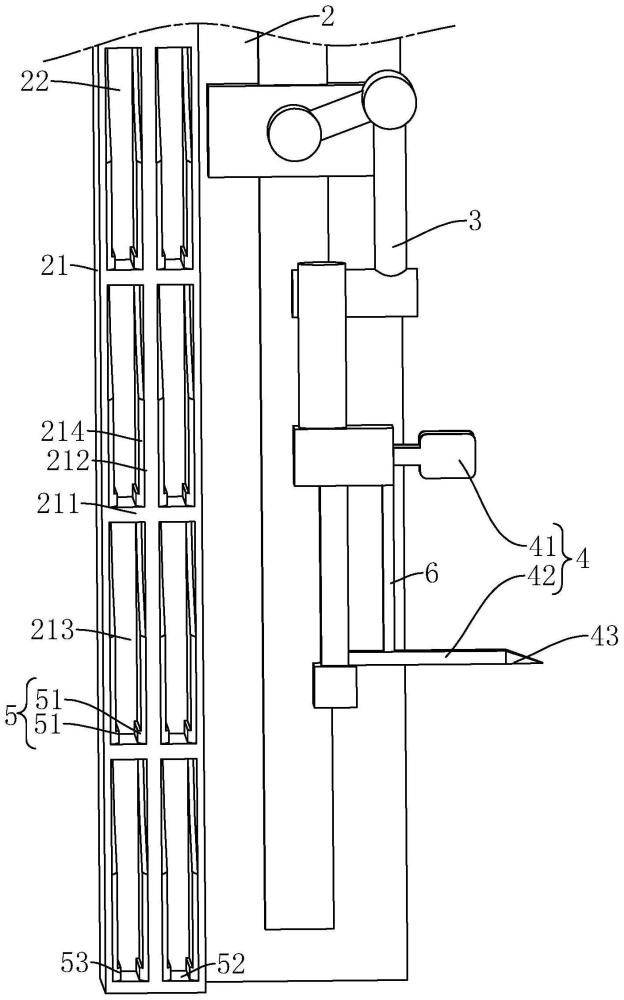
1.一种基于协作机器人的档案机械手设备,包括位于档案架(100)外部的行走架(1),其特征在于:所述行走架(1)上滑动连接有夹存部(2),夹存部(2)的一侧设有暂存箱(21),暂存箱(21)宽度方向的一侧开口设置且设为开口部(22),夹存部(2)竖直滑动连接有机械手本体(3),机械手本体(3)远离夹存部(2)的一端设有用于托夹档案的托夹部(4)。
2.根据权利要求1所述的一种基于协作机器人的档案机械手设备,其特征在于:所述暂存箱(21)内等间距设有若干水平分隔板(211),若干水平分隔板(211)的上端部均竖直设有竖直分隔板(212),竖直分隔板(212)与水平分隔板(211)相互垂直设置,竖直分隔板(212)位于对应的水平分隔板(211)的中心处,若干水平板与竖直板将暂存箱(21)分隔形成若干暂存盒(213)。
3.根据权利要求2所述的一种基于协作机器人的档案机械手设备,其特征在于:所述竖直分隔板(212)高度方向的两侧均设有导向部一(214),导向部一(214)均由外至内倾斜设置,同一分隔板两侧的导向部一(214)沿竖直方向相互对称设置。
4.根据权利要求3所述的一种基于协作机器人的档案机械手设备,其特征在于:所述托夹部(4)包括用于夹持档案的电夹(41),托夹部(4)向下方延伸有延伸杆(6),托夹部(4)包括用于托住档案的托板(42),托板(42)与延伸板相互垂直设置且固定连接,托板(42)位于电夹(41)的下方,托板(42)远离延伸杆(6)的一端设有插入部(43),插入部(43)由上至下倾斜设置,插入部(43)的下端部位于最低处。
5.根据权利要求4所述的一种基于协作机器人的档案机械手设备,其特征在于:若干所述竖直分隔板(212)的高度小于电夹(41)与托板(42)间的距离。
6.根据权利要求2所述的一种基于协作机器人的档案机械手设备,其特征在于:所述水平分隔板(211)的上端部均设有若干用于架起档案的架起部(5),若干架起部(5)位于竖直分隔板(212)宽度方向的两侧。
7.根据权利要求6所述的一种基于协作机器人的档案机械手设备,其特征在于:所述架起部(5)包括两根架起板(51),两根架起板(51)分别位于暂存盒(213)长度方向的两端,两根架起板(51)均位于暂存盒(213)内,两根架起板(51)间形成插入通道(52),插入通道(52)的宽度大于托板(42)的宽度。
8.根据权利要求7所述的一种基于协作机器人的档案机械手设备,其特征在于:所述架起板(51)靠近开口部(22)的位置设有导向部二(53),导向部二(53)由外至内倾斜设置,架起板(51)与上方的对应导向部一(214)的倾斜角度相同。
技术总结
本申请涉及一种基于协作机器人的档案机械手设备,涉及库房档案出库技术领域,其包括行走架,所述行走架上滑动连接有夹存部,夹存部的一侧设有暂存箱,暂存箱宽度方向的一侧开口设置且设为开口部,夹存部竖直滑动连接有机械手本体,机械手本体远离夹存部的一端设有用于托夹档案的托夹部。在取若干档案时,机械手带动托夹部向档案的位置靠近,托夹部将档案夹起,通过机械手带动托夹部进入至暂存箱的内部,然后托夹部取消对档案的固定,档案被放置与暂存箱内,机械手即可取下一档案;将待取档案均置于暂存箱内,即可操纵夹存部向传送装置的位置移动,再利用机械手和托夹部相配合,将档案一一置于传送装置上完成档案的取出,夹取档案的效率较高。
技术研发人员:张丰春,刘小峰,张雷,朱海,孙德峰,李峰,叶永利
受保护的技术使用者:烟台东方瑞创达电子科技有限公司
技术研发日:20230824
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!