一种仿生手及机器人的制作方法
本申请涉及仿生机器人,尤其涉及一种仿生手及机器人。
背景技术:
1、目前,仿生机器人在各行各业得到越来越多的应用,可完成例如组装、搬运等动作。
2、然而,现有仿生机器人的手掌空间利用率较低,占用空间大,且成本较高。
技术实现思路
1、本申请提供了一种仿生手及机器人,以缩减整体驱动机构的占用空间。
2、本申请提供了一种仿生手,包括:
3、安装架,包括第一端和第二端;
4、第一手指,连接于所述第一端,并位于所述安装架的第一侧;
5、多个第二手指,并列设置于所述安装架远离所述第一手指的第二侧,所述第二手指相对于所述第二端凸出;
6、若干驱动机构,与所述多个第二手指传动连接,至少两所述第二手指传动连接于同一所述驱动机构,所述若干驱动机构用于驱动所述多个第二手指动作。
7、基于以上技术方案,本申请提供的仿生手中,至少两第二手指可共用一驱动机构。一方面,可减少驱动机构的设置数量,缩减驱动机构的占用空间,提升仿生手的空间利用率。另一方面,也可降低仿生手的材料用量,降低生产成本。
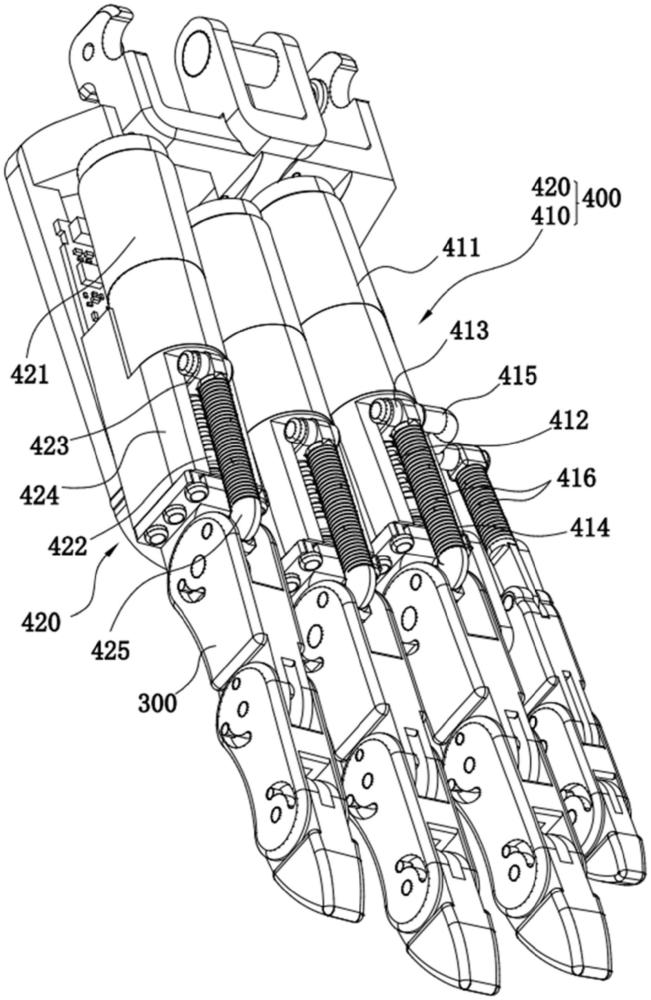
8、在一些可能的实施方式中,所述若干驱动机构包括第一驱动机构,所述第一驱动机构包括第一驱动件、转接杆及两第一传动杆;
9、两所述第一传动杆的一端分别于一所述第二手指传动连接,两所述第一传动杆远离其自身所连所述第二手指的一端均通过所述转接杆与所述第一驱动件的输出端传动连接。
10、在一些可能的实施方式中,所述若干驱动机构还包括两第二驱动机构,所述仿生手包括四个并列设置的第二手指;
11、两所述第二手指传动连接于所述第一驱动机构,另外两所述第二手指一一对应地传动连接于两所述第二驱动机构。
12、在一些可能的实施方式中,所述第二手指包括依次铰接的第一指节、第二指节和第三指节,所述第一指节远离所述第二指节的一端相对于所述安装架铰接设置,所述第一指节远离所述第二指节的一端并与所述驱动机构传动连接;
13、所述第二手指还包括第一连杆和第二连杆,所述第一连杆传动连接于所述第一指节与所述第二指节之间,所述第二连杆传动连接于所述第二指节与所述第三指节之间。
14、在一些可能的实施方式中,所述第一指节靠近所述驱动机构的一端开设有第一弧形导向槽,所述第一指节远离所述驱动机构的一端开设有第二弧形导向槽;
15、当所述第一指节相对于所述安装架处于伸直状态时,所述第一弧形导向槽位于所述第一指节靠近所述第一侧的一侧,所述第二弧形导向槽可位于所述第一指节靠近所述第二侧的一侧;
16、所述第一连杆靠近所述驱动机构的一端配置有第一导向轴,所述第一导向轴相对于所述安装架铰接设置,并滑动穿设于所述第一弧形导向槽;
17、所述第一连杆远离所述驱动机构的一端配置有第二导向轴,所述第二导向轴与所述第二指节铰接,并滑动穿设于所述第二弧形导向槽中。
18、在一些可能的实施方式中,所述第二指节靠近所述第一指节的一端开设有第三弧形导向槽,所述第二指节远离所述第一指节的一端开设有第四弧形导向槽;
19、当所述第二指节相对于所述安装架处于伸直状态时,所述第三弧形导向槽可位于所述第二指节靠近所述第一侧的一侧,所述第四弧形导向槽可位于所述第二指节靠近所述第二侧的一侧;
20、所述第二连杆靠近所述第一指节的一端配置有第三导向轴,所述第三导向轴与所述第一指节靠近所述第二指节的一端交接,并滑动穿设于所述第三弧形导向槽中;
21、所述第二连杆靠近所述第三指节的一端配置有第四导向轴,所述第四导向轴与所述第三指节铰接,并滑动穿设于所述第四弧形导向槽。
22、在一些可能的实施方式中,所述第一手指包括指根节、指尖节、驱动组件和连接杆;
23、所述指根节的一端铰接于所述第一端,所述指尖节铰接于所述指根节的另一端;
24、所述驱动组件安装于所述指根节上,所述连接杆的一端相对于所述第一端铰接设置,所述连接杆的另一端与所述驱动组件的输出端铰接。
25、在一些可能的实施方式中,所述指尖节包括第一连接座和指尖,所述第一连接座连接于所述指根节远离所述安装架的一端,所述指根节远离所述安装架的一端凸出设置有与所述第一连接座间隔相对的延伸板,所述指尖铰接于所述第一连接座与所述延伸板之间。
26、在一些可能的实施方式中,所述第一连接座与所述指尖连接有扭簧;和/或
27、所述延伸板与所述指尖之间连接有扭簧。
28、另外,本申请还提供了一种机器人,包括如上各实施方式中提供的所述仿生手。
技术特征:
1.一种仿生手,其特征在于,包括:
2.根据权利要求1所述的仿生手,其特征在于,所述若干驱动机构包括第一驱动机构,所述第一驱动机构包括第一驱动件、转接杆及两第一传动杆;
3.根据权利要求2所述的仿生手,其特征在于,所述若干驱动机构还包括两第二驱动机构,所述仿生手包括四个并列设置的第二手指;
4.根据权利要求1所述的仿生手,其特征在于,所述第二手指包括依次铰接的第一指节、第二指节和第三指节,所述第一指节远离所述第二指节的一端相对于所述安装架铰接设置,所述第一指节远离所述第二指节的一端并与所述驱动机构传动连接;
5.根据权利要求4所述的仿生手,其特征在于,所述第一指节靠近所述驱动机构的一端开设有第一弧形导向槽,所述第一指节远离所述驱动机构的一端开设有第二弧形导向槽;
6.根据权利要求4或5所述的仿生手,其特征在于,所述第二指节靠近所述第一指节的一端开设有第三弧形导向槽,所述第二指节远离所述第一指节的一端开设有第四弧形导向槽;
7.根据权利要求1所述的仿生手,其特征在于,所述第一手指包括指根节、指尖节、驱动组件和连接杆;
8.根据权利要求7所述的仿生手,其特征在于,所述指尖节包括第一连接座和指尖,所述第一连接座连接于所述指根节远离所述安装架的一端,所述指根节远离所述安装架的一端凸出设置有与所述第一连接座间隔相对的延伸板,所述指尖铰接于所述第一连接座与所述延伸板之间。
9.根据权利要求8所述的仿生手,其特征在于,所述第一连接座与所述指尖连接有扭簧;和/或
10.一种机器人,其特征在于,包括如权利要求1至9任一项所述的仿生手。
技术总结
本申请公开了一种仿生手及机器人,涉及仿生机器人技术领域。仿生手包括安装架、第一手指、多个第二手指和若干驱动机构;安装架包括第一端和第二端;第一手指连接于所述第一端,并位于所述安装架的第一侧;多个第二手指并列设置于所述安装架远离所述第一手指的第二侧,所述第二手指相对于所述第二端凸出;若干驱动机构与所述多个第二手指传动连接,至少两所述第二手指传动连接于同一所述驱动机构,所述若干驱动机构用于驱动所述多个第二手指动作。本申请提供的仿生手可缩减整体驱动机构的占用空间。
技术研发人员:钱光跃,刘乐锋,房雄远,索文豪,梁忠浩
受保护的技术使用者:深圳市优世界机器人有限公司
技术研发日:20230927
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!