全自动智能多头螺栓扳手机器人的制作方法
本发明涉及铁路轨道作业,尤其涉及一种全自动智能多头螺栓扳手机器人。
背景技术:
1、建成的高铁线路,钢轨通过焊接而形成一根长轨道,由于环境温度变化,轨道内应力变化很大,铁路工作人员需要根据温度变化,每年进行应力放散。应力放散就是把钢轨弹条螺栓松开到一定高度,弹条可以取下来,再把钢轨内应力释放,通常应力释放采用钢轨增加、截断、拉伸、焊接等方式,使钢轨重新分布应力,以适应气温的变化,目前铁路工务部门通常使用手推内燃机动螺栓扳手进行人工作业,但内燃机动螺栓扳手存在诸多不足,如工作人员多、作业效率低及废气排放问题,中国发明专利申请cn112496724a公开了一种全自动扣件螺栓松紧设备及其方法,设备采用电动方式作业避免了废气排放,同时为了避免使用时装备倾倒引发的安全事故,说明书第[0018]段还公开了防侧翻装置以及主体还通过辅助轮连接杆活动连接辅助轮,防侧翻装置在准备工作前需依靠人力压缩阻力弹簧二使两防侧翻轮的间距增大卡入轨道,工作过程中设备依靠阻力弹簧二具有的高弹力使防侧翻轮和轨道紧密贴合,公开方案为保证设备工作中不倾翻则需增加阻力弹簧二的弹力,但却增大了人工压缩弹簧的难度,实际操作过程中工人操作难度大,且长期使用和频繁的加载往往会导致弹簧出现疲劳破坏,为设备倾翻带来隐患,而主体还通过辅助轮连接杆活动连接辅助轮增加稳定性的方案,辅助轮需架设在另一条轨道上,占地较大,且在非直线轨道行驶时,辅助轮行驶时相对于轨道易出现偏移,容易造成设备倾翻,整体设备需依靠人工操作协助,不够智能化。
技术实现思路
1、本发明的目的是:为克服现有技术中存在的不足,本发明提供一种全自动智能多头螺栓扳手机器人。
2、本发明解决上述技术问题的技术方案如下:
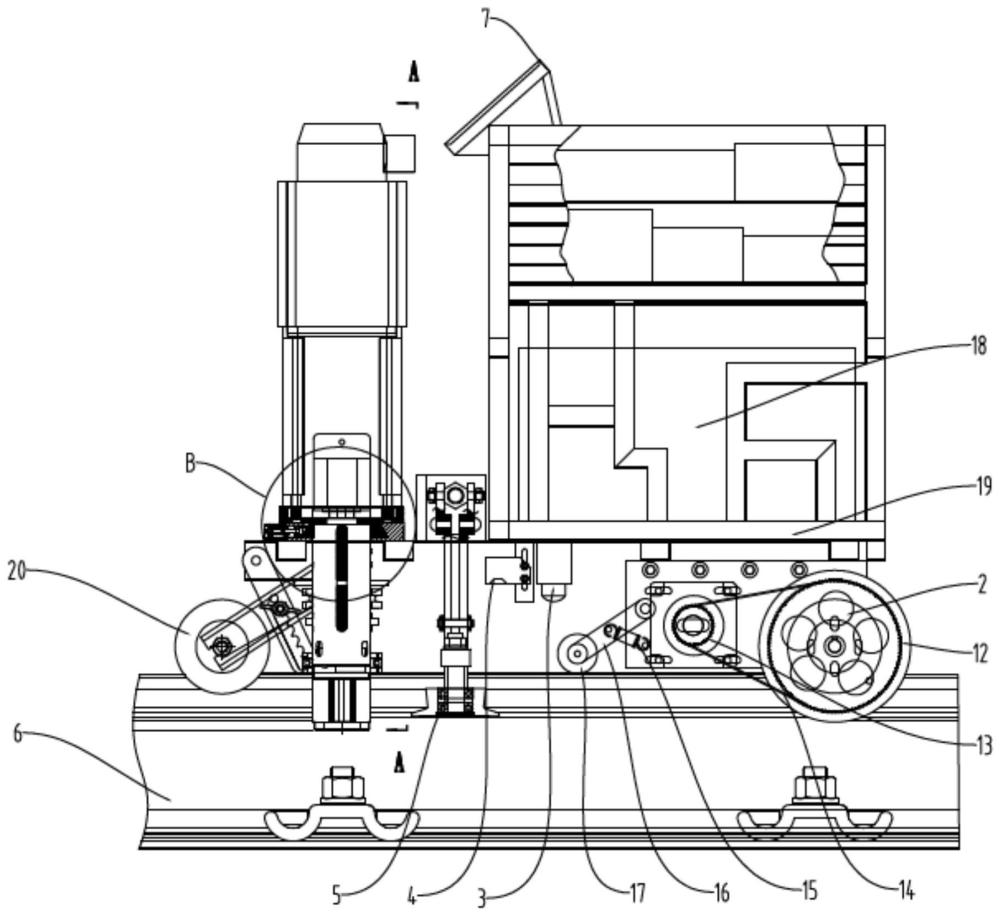
3、本发明提供一种全自动智能多头螺栓扳手机器人,包括:
4、车架主体,其底部沿行驶方向依次设有与轨道轮廓相配合的前行走轮和后行走轮;
5、扳手组件,包括对称布置于所述车架主体两侧的松紧装置以及使所述松紧装置实现上下位移的升降装置;
6、夹紧组件,包括主动螺杆和安装在所述主动螺杆上的两个从动螺母,两个所述从动螺母均连接有夹紧轮,所述夹紧轮对称布置于所述轨道两侧且其内轮廓面可与轨道贴合;
7、检测组件,包括相对于全自动智能多头螺栓扳手机器人前进方向,位于所述扳手组件前方用于检测轨道螺栓位置的激光传感器;
8、和用于控制设备正常作业及行进的操控系统。
9、与现有技术相比,本发明的有益效果是:
10、本发明单台设备配备两套扳手组件,作业行进过程中,激光传感器将检测识别到的目标螺栓位置信号传输至控制系统,两套扳手组件可实现同时或依次自动完成轨道两侧螺母的旋松或拧紧作业,实现自动化智能作业;前后行走轮呈前后布置且其轮廓与轨道轮廓相配合,保证前后行走轮与轨道贴合,且夹紧组件通过对主动螺杆施加轴向力使主动螺杆旋转,带动两从动螺母沿主动螺杆轴向位移实现两夹紧轮的相对开合,且作业时两夹紧轮与轨道夹紧并有效保持夹紧状态,可实现整台设备沿单轨行走作业不倾翻,弯道行驶不偏移,安全性高。
11、优选地,所述松紧装置顶部设有可实现正反转的第一电机,所述第一电机输出端设有减速机,所述减速机输出轴底部套接有滑动套,所述滑动套上部设有用于安装位置传感器的第一连接板,所述滑动套底部通过第一销轴连接有卡环,所述卡环通过第二销轴连接有快换扳手,第一销轴与第二销轴呈十字。
12、上述技术方案带来进一步的有益效果:松紧装置采用电机驱动,通过电机的正转与反转实现快换扳手的旋松或拧紧动作;同时通过拧松或拧紧电流或电压变化值,转换为扭矩控制;卡环与滑动套及快换扳手均通过销轴连接的方式,使快换扳手于前后和左右方向均可摆动,便于作业过程中快换扳手更顺利的与目标螺栓套接到位,避免人工辅助;减速机可以实现减速增扭,降低电机选型功率减少电能消耗。
13、优选地,所述第一连接板于四角位置设有四根导向柱,所述导向柱的顶部设有可沿其上下位移的第二连接板,所述第一连接板与所述第二连接板之间设有第一弹簧,所述升降装置顶部设有第二电机,所述第二电机输出轴连接有升降螺杆,所述升降螺杆上套接有拨叉,所述拨叉于套接位置固定有与所述升降螺杆螺纹配合的第一螺母,所述拨叉两侧端面设有与所述第二连接板连接的销轴。
14、上述技术方案带来进一步的有益效果:第二电机带动升降螺杆旋转,通过第一螺母的配合,使拨叉实现升降位移;拨叉沿导向柱下降过程中压缩第一弹簧带动快换扳手下行,快换扳手下行到位后反推第一连接板上行,位置传感器感应到第二连接板后,升降装置停机,从而避免因螺栓安装高度不一致而导致快换扳手下降过多顶坏或造成夹紧组件破坏;同时拨叉与第二连接板销接的方式使第二连接板工作中能自适应调整,以增大与第一弹簧的接触面,避免因加工误差导致与第一弹簧接触不良,第一弹簧受力不均,快换扳手移动过程中卡滞。
15、优选地,两个所述松紧装置底部设有与所述车架主体连接的固定板,所述固定板上平面设有滑槽,两个所述松紧装置均可沿所述滑槽位移以实现中心距调整。
16、上述技术方案带来进一步的有益效果:松紧装置沿固定板滑槽位置调整,可解决高速铁路和普通铁路钢轨两侧螺栓孔中心距不同的使用问题,一台设备既可在高铁线路使用,也可以普铁线路上使用。
17、优选地,全自动智能多头螺栓扳手机器人还包括用于给各电动部件供电的锂电池组,所述第一电机为伺服电机。
18、上述技术方案带来进一步的有益效果:整套设备采用锂电池组作为供电电源,现场使用更环保;松紧装置采用伺服电机驱动,可实现扭矩值的精准控制。
19、优选地,所述前行走轮同轴侧设有大带轮,所述大带轮与第三电机直联的小带轮通过皮带传动,靠近所述第三电机处设有第二连杆,所述第二连杆一端与第三电机安装板销接,另一端与涨紧胶轮连接,所述第二连杆上设有使所述涨紧胶轮与轨道上平面贴合的复位弹簧,所述涨紧胶轮端部设有编码器。
20、上述技术方案带来进一步的有益效果:电机直接驱动小带轮经皮带传动驱动大带轮旋转的方式,可实现降速扭矩,减少电机的耗电;编码器随涨紧胶轮旋转可精确计算设备行驶的距离,并将信息传递至控制系统,以避免设备在停机过程中行走轮出现打滑造成螺栓定位位置不准确。
21、优选地,所述夹紧组件还包括夹紧电机,所述夹紧电机通过联轴器驱动所述主动螺杆旋转,所述主动螺杆与两个所述从动螺母采用正反丝配合以实现两个所述从动螺母同步向中心位移或偏离,每个所述从动螺母与所述夹紧轮通过连杆机构连接。
22、上述技术方案带来进一步的有益效果:夹紧机构采用电机驱动,节省人力操作强度,主动螺杆与从动螺母采用正反丝配合可实现夹紧轮的同步移动。
23、优选地,所述检测组件还包括摄像头,所述摄像头安装于所述车架主体下方且靠近于所述激光传感器。
24、上述技术方案带来进一步的有益效果:摄像头辅助激光传感器进行目标螺栓的识别。
25、优选地,四套全自动智能多头螺栓扳手机器人通过连接桥架实现组合使用,所述连接桥架中心位置设有定位盘,所述定位盘外部设有四套可相对定位盘圆周位移的套杆,全部所述套杆外部均套设有沿轴向可相对滑移的套管,所述套管的一端与全自动智能多头螺栓扳手机器人铰接固定。
26、上述技术方案带来进一步的有益效果:四套设备通过连接桥架可实现双轨同时使用,根据作业需要自动实现前面设备松螺母,后面设备紧螺母的动作,提高作业效率;四套设备可沿定位盘圆周进行位移,进行位置纠偏。
27、优选地,所述套杆于套管内的一端设有凸台,所述凸台的两端分别设有第二弹簧和第三弹簧。
28、上述技术方案带来进一步的有益效果:第二弹簧和第三弹簧的联合作用可以使套杆与套管位置变化后保持相对固定。
- 还没有人留言评论。精彩留言会获得点赞!