一种生产线用工业机械手臂的制作方法
本发明涉及工业机械手臂,特别涉及一种生产线用工业机械手臂。
背景技术:
1、工业机械臂是拟人手臂、手腕和手功能的机械电子装置。它可把任一物件或工具按空间位姿位置和姿态的时变要求进行移动,从而完成某一工业生产的作业要求。工业机械手臂在工业生产线中的应用非常广泛,如:工业机械手臂可以携带焊枪或激光切割头,执行自动化的焊接和切割任务,提高焊接或者切割的质量和速度;工业机械手臂可以进行重物搬运和物料处理工作;工业机械手臂可以精确控制喷涂或涂覆的位置、厚度和均匀性,确保涂层质量,并减少涂装过程中的浪费;工业机械手臂具有高度准确的定位能力和灵活的动作,可以将零部件精确地插入相应的位置,确保装配质量和效率,在生产线上可以完成各种机械零部件的组装与装配工作。
2、现有的机械手臂夹持带键槽的轴类工件进行装配加工时,通常需要调整键槽的位置,再将轴棒推入装配口,而常规机械手并不具备夹持轴棒定位键槽以及推进的功能,从而导致夹持带键槽的轴类工件进行装配加工效率较低。
技术实现思路
1、要解决的技术问题:本发明提供的一种生产线用工业机械手臂,可以解决上述提到的问题。
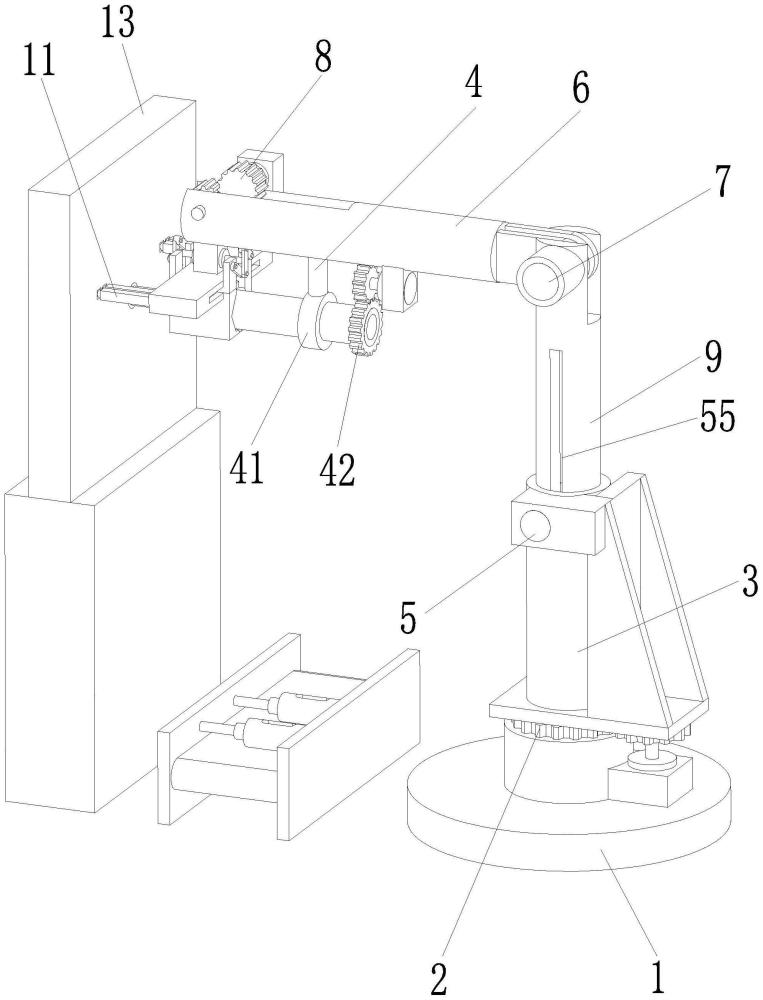
2、技术方案:为了实现上述目的,本发明采用以下技术方案,一种生产线用工业机械手臂,包括安装基座,所述安装基座上安装有用于调节机械手臂朝向的转向单元,转向单元上安装有支撑套管,支撑套管内滑动安装有机械立臂,支撑套管与机械立臂共同安装有用于控制机械立臂升起下降的升降单元,机械立臂上端左侧设置有机械臂,且机械立臂上端安装有用于调节机械臂角度的角度调节单元,机械臂左端安装有用于调节机械夹爪角度的活动夹手单元,机械臂内安装有用于带动夹持物料进给以及转向的进给转向单元,安装基座左侧设置有开设装配口与对位口的装配台。
3、所述进给转向单元包括机械臂内安装的进给机构,进给机构上安装有转动机构。
4、优选的,所述活动夹手单元包括机械臂左端开设的活动槽,机械臂左端于活动槽内转动安装有不完全齿轮,机械臂前端通过电机座安装有一号正反转电机,一号正反转电机的输出轴连接有一号主动齿轮,一号主动齿轮与不完全齿轮相啮合,不完全齿轮下端安装有连接座,连接座下侧中部贯穿安装有双轴电机,双轴电机的两个输出轴末端均连接有主动摇杆,主动摇杆上下两端均铰接有被动摇杆,且连接座下端安装有支撑板,支撑板左右两侧壁对称开设有矩形滑槽,左右两个矩形滑槽均滑动安装有两个前后对称分布的t形板,被动摇杆远离主动摇杆的一端铰接于t形板上端,左右两个正相对的t形板下端共同安装有夹持手爪,且前后两个夹持手爪夹持端面相对应,前后两个夹持手爪共同夹持有带键槽轴棒,支撑板下端对应带键槽轴棒上的键槽开设有半腰形滑槽,半腰形滑槽内滑动安装有限位块,且限位块右下端做圆角处理,限位块上端通过一号压缩弹簧连接于支撑板上,夹持手爪夹持端面均匀开设有多个安装孔,安装孔内通过二号压缩弹簧安装有滚珠,滚珠与带键槽轴棒的圆周面滚动接触。
5、优选的,所述进给机构包括机械臂内开设的圆形槽,机械臂于圆形槽内通过电机座安装有二号正反转电机,二号正反转电机的输出轴连接有丝杠,且丝杠通过螺纹连接有t形套杆,机械臂于活动槽前后端面对应t形套杆对称开设有腰形导引槽,t形套杆前后两端分别滑动连接于对应的腰形导引槽内,t形套杆下端通过连杆安装有环形支撑板,环形支撑板内壁转动安装有空心管,且空心管直径略大于带键槽轴棒,空心管内左侧安装有贴合于带键槽轴棒右端的圆形电磁铁。
6、优选的,所述转动机构包括空心管右端套设的外齿环,机械臂下端通过电机座安装有旋转电机,旋转电机的输出轴连接有二号主动齿轮,二号主动齿轮与外齿环相啮合。
7、优选的,所述转向单元包括安装基座上端转动安装的被动齿轮,安装基座上通过电机座安装有一号伺服电机,一号伺服电机的输出轴连接有三号主动齿轮,三号主动齿轮与被动齿轮相啮合,被动齿轮上端安装有支撑套管,支撑套管下端固定套设有承托板,且承托板固定连接于被动齿轮上端,三号主动齿轮上端滑动接触于承托板下端。
8、优选的,所述升降单元包括机械立臂左端开设的矩形容纳槽,矩形容纳槽右端内壁垂直安装有齿条,承托板右侧上端安装有支撑座,支撑套管上端与支撑座共同通过电机座安装有三号正反转电机,机械立臂前端对应三号正反转电机开设有连通于矩形容纳槽的条形避让槽,三号正反转电机的输出轴转动贯穿支撑套管和条形避让槽并连接有传动齿轮,且传动齿轮位于矩形容纳槽内,传动齿轮与齿条相啮合。
9、优选的,所述角度调节单元包括机械立臂上端开设的安装槽,机械立臂上端于安装槽内前后端面对称铰接有连接板,机械立臂上侧前端通过电机座安装有二号伺服电机,二号伺服电机的输出轴转动贯穿机械立臂连接有传动轴,且传动轴贯穿连接于前后两个连接板上,前后两个连接板左端共同连接于机械臂上。
10、优选的,所述支撑板左侧壁前后两端分别均匀开设有多个限位孔,限位孔内滑动安装有半圆头对位杆,且半圆头对位杆右端通过三号压缩弹簧连接于支撑板上。
11、有益效果:1.本发明提供的一种生产线用工业机械手臂所采用的转向单元与升降单元配合,可以将机械臂准确带动至所需方向与高度,工作便捷。
12、2.本发明提供的一种生产线用工业机械手臂所采用的角度调节单元与活动夹手单元配合,可以调节机械臂角度,同时可以调节夹持手爪位置,便于精准夹持带键槽轴棒,且采用活动夹持的方式便于后续对带键槽轴棒的键槽对位工作。
13、3.本发明提供的一种生产线用工业机械手臂所采用的进给机构与转动机构配合,可以带动带键槽轴棒缓慢转动,从而实现键槽对位的效果,且不影响后续推动带键槽轴棒脱离带键槽轴棒完成装配工作,对位进给效率高,有效提高装配工作效率。
技术特征:
1.一种生产线用工业机械手臂,包括安装基座(1),其特征在于,所述安装基座(1)上安装有用于调节机械手臂朝向的转向单元(2),转向单元(2)上安装有支撑套管(3),支撑套管(3)内滑动安装有机械立臂(9),支撑套管(3)与机械立臂(9)共同安装有用于控制机械立臂(9)升起下降的升降单元(5),机械立臂(9)上端左侧设置有机械臂(6),且机械立臂(9)上端安装有用于调节机械臂(6)角度的角度调节单元(7),机械臂(6)左端安装有活动夹手单元(8),机械臂(6)内安装有用于带动夹持物料进给以及转向的进给转动单元(4);
2.根据权利要求1所述的一种生产线用工业机械手臂,其特征在于:所述进给机构(41)包括机械臂(6)内开设的圆形槽(411),机械臂(6)于圆形槽(411)内通过电机座安装有二号正反转电机(412),二号正反转电机(412)的输出轴连接有丝杠(413),且丝杠(413)通过螺纹连接有t形套杆(414),机械臂(6)于活动槽(81)前后端面对应t形套杆(414)对称开设有腰形导引槽(415),t形套杆(414)前后两端分别滑动连接于对应的腰形导引槽(415)内,t形套杆(414)下端通过连杆(416)安装有环形吊板(417),环形吊板(417)内壁转动安装有空心管(418),且空心管(418)直径略大于带键槽轴棒(93),空心管(418)内左侧安装有贴合于带键槽轴棒(93)右端的圆形电磁铁(419)。
3.根据权利要求2所述的一种生产线用工业机械手臂,其特征在于:所述转动机构(42)包括空心管(418)右端套设的外齿环(421),机械臂(6)下端通过电机座安装有旋转电机(422),旋转电机(422)的输出轴连接有二号主动齿轮(423),二号主动齿轮(423)与外齿环(421)相啮合。
4.根据权利要求1所述的一种生产线用工业机械手臂,其特征在于:所述转向单元(2)包括安装基座(1)上端转动安装的被动齿轮(21),安装基座(1)上通过电机座安装有一号伺服电机(22),一号伺服电机(22)的输出轴连接有三号主动齿轮(23),三号主动齿轮(23)与被动齿轮(21)相啮合,被动齿轮(21)上端安装有支撑套管(3),支撑套管(3)下端固定套设有承托板(24),且承托板(24)固定连接于被动齿轮(21)上端,三号主动齿轮(23)上端滑动接触于承托板(24)下端。
5.根据权利要求4所述的一种生产线用工业机械手臂,其特征在于:所述升降单元(5)包括机械立臂(9)左端开设的矩形容纳槽(51),矩形容纳槽(51)右端内壁垂直安装有齿条(52),承托板(24)右侧上端安装有支撑座(53),支撑套管(3)上端与支撑座(53)共同通过电机座安装有三号正反转电机(54),机械立臂(9)前端对应三号正反转电机(54)开设有连通于矩形容纳槽(51)的条形避让槽(55),三号正反转电机(54)的输出轴转动贯穿支撑套管(3)和条形避让槽(55)并连接有传动齿轮(56),且传动齿轮(56)位于矩形容纳槽(51)内,传动齿轮(56)与齿条(52)相啮合。
6.根据权利要求1所述的一种生产线用工业机械手臂,其特征在于:所述角度调节单元(7)包括机械立臂(9)上端开设的安装槽(71),机械立臂(9)上端于安装槽(71)内前后端面对称铰接有连接板(72),机械立臂(9)上侧前端通过电机座安装有二号伺服电机(73),二号伺服电机(73)的输出轴转动贯穿机械立臂(9)连接有传动轴(74),且传动轴(74)贯穿连接于前后两个连接板(72)上,前后两个连接板(72)左端共同连接于机械臂(6)上。
7.根据权利要求1所述的一种生产线用工业机械手臂,其特征在于:所述支撑板(89)左侧壁前后两端分别均匀开设有多个限位孔(10),限位孔(10)内滑动安装有半圆头对位杆(11),且半圆头对位杆(11)右端通过三号压缩弹簧(12)连接于支撑板(89)上。
技术总结
本发明涉及工业机械手臂技术领域,特别涉及一种生产线用工业机械手臂,包括安装基座、转向单元、支撑套管、机械立臂、升降单元、机械臂、角度调节单元、活动夹手单元、进给转向单元。现有的机械手臂用于夹持带键槽的轴类工件进行装配加工时,常规机械手并不具备夹持轴棒定位键槽以及推进的功能,从而导致夹持带键槽的轴类工件进行装配加工效率较低。而本发明提供的一种生产线用工业机械手臂所采用的升降单元、角度调节单元、活动夹手单元与进给转向单元配合,可以采用活动夹持的方式精准夹持带键槽轴棒,还可以实现键槽对位的效果,且不影响后续推动带键槽轴棒脱离带键槽轴棒完成装配工作,对位进给效率高,有效提高装配工作效率。
技术研发人员:崔剑平,黄亚飞,曹思言
受保护的技术使用者:济南奥普瑞思智能装备有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!