机器人、目标识别及定位方法与系统与流程
本申请涉及机器人,更具体地说,涉及一种机器人、目标识别及定位方法与系统。
背景技术:
1、近年来,机器视觉技术在飞速发展,通过将机器人与视觉传感器结合,形成视觉机器人,提高机器人的智能化。结合有相机的视觉机器人已广泛应用于电力行业及化工行业等行业中。特别地,视觉机器人在危险环境下的维修和作业,表现突出。而在维修和作业过程中,识别维修位置以及作业位置是必不可少的一环。现有技术在定位维修位置以及作业位置时,将单目测距应用于定位过程中,识别效率较低。
技术实现思路
1、有鉴于此,本申请提供了一种机器人、目标识别及定位方法与系统,用于解决现有技术中视觉机器人识别效率较低的缺点。
2、为了实现上述目的,现提出的方案如下:
3、一种目标识别及定位方法,应用于装配有相机的机器人,包括:
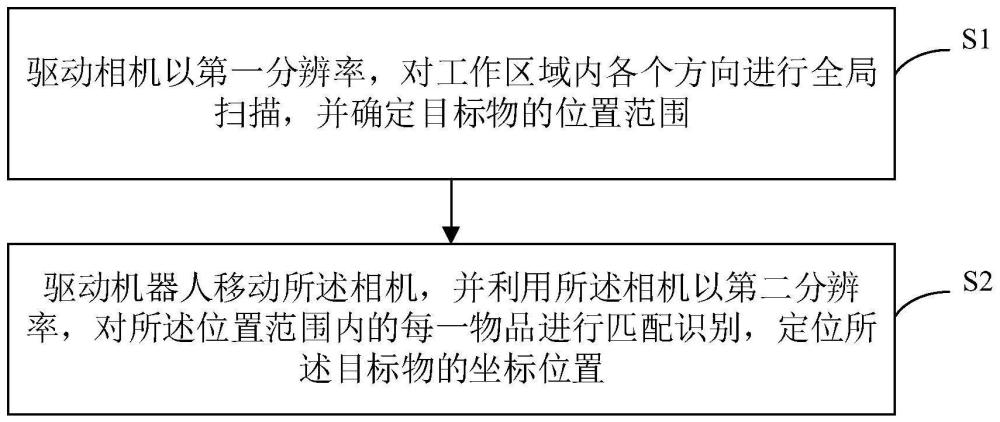
4、驱动相机以第一分辨率,对工作区域内各个方向进行全局扫描,并确定目标物的位置范围;
5、驱动机器人移动所述相机,并利用所述相机以第二分辨率,对所述位置范围内的每一物品进行匹配识别,定位所述目标物的坐标位置;其中,所述第一分辨率低于所述第二分辨率。
6、可选的,所述驱动相机以第一分辨率,对工作区域内各个方向进行全局扫描,并确定目标物的位置范围,包括:
7、驱动相机以第一分辨率,对工作区域内的各个方向进行图像采集,得到各个方向的各个初步图像;
8、对每个初步图像进行图像增强,得到每个初步增强图像;
9、对每个初步增强图像进行图像识别,判断每个初步增强图像中是否包含所述目标物,得到每个初步增强图像的判断结果;
10、基于每个初步增强图像的判断结果,确定存在所述目标物的位置范围,所述位置范围用于初步定位目标物所在地。
11、可选的,所述基于每个初步增强图像的判断结果,确定存在所述目标物的位置范围,包括:
12、选取判断结果表示存在目标物的所有初步增强图像分别作为初步目标图像;
13、确定各个初步目标图像的坐标范围;
14、整合各个坐标范围,生成所述目标物的位置范围。
15、可选的,所述驱动机器人移动所述相机,包括:
16、确定机器坐标系以及视觉坐标系间的关联关系;
17、基于所述位置范围以及所述关联关系,驱动机器人移动所述相机。
18、可选的,所述利用所述相机以第二分辨率,对所述位置范围内的每一物品进行匹配识别,定位所述目标物的坐标位置,包括:
19、驱动所述相机以第二分辨率,对所述位置范围内每一物品进行图像采集,得到物品图像;
20、对每一物品图像进行图像增强,得到物品增强图像;
21、对每个物品增强图像进行图像识别,判断每个物品增强图像是否对应于目标物,得到每个物品增强图像的判断结果;
22、基于每个物品增强图像的判断结果,定位所述目标物的坐标位置。
23、可选的,所述对每个物品增强图像进行图像识别,判断每个物品增强图像是否对应于目标物,得到每个物品增强图像的判断结果,包括:
24、提取每个物品增强图像的感兴趣区域;
25、提取每个感兴趣区域的区域特征;
26、基于每个感兴趣区域的区域特征,识别对应物品增强图像中是否包含目标物,得到每个物品增强图像的判断结果。
27、可选的,所述机器人还装配有激光雷达;
28、所述驱动所述相机以第二分辨率,对所述位置范围内每一物品进行图像采集,得到物品图像,包括:
29、获取所述激光雷达采集的激光雷达数据,确定所述位置范围内每一物品的位置信息;
30、驱动所述相机以第二分辨率,基于每个物品的位置信息,对所述位置范围内每一物品进行图像采集,得到物品图像。
31、可选的,还包括:
32、基于所述坐标位置,获取所述目标物的姿态信息。
33、一种机器人,包括:
34、确定模块,用于驱动相机以第一分辨率,对工作区域内各个方向进行全局扫描,并确定目标物的位置范围;
35、定位模块,用于驱动机器人移动所述相机,并利用所述相机以第二分辨率,对所述位置范围内的每一物品进行匹配识别,定位所述目标物的坐标位置;其中,所述第一分辨率低于所述第二分辨率。
36、一种目标识别及定位系统,包括控制中心及装配有相机的机器人;
37、所述控制中心,用于生成初步识别指令;在确定目标物的位置范围后,生成物品识别指令;将所述初步识别指令及所述物品识别指令发送至机器人;
38、所述机器人,用于在接收到初步识别指令时,驱动相机以第一分辨率,对工作区域内各个方向进行全局扫描,并确定目标物的位置范围;在接收到物品识别指令时,驱动机器人移动所述相机,并利用所述相机以第二分辨率,对所述位置范围内的每一物品进行匹配识别,定位所述目标物的坐标位置;其中,所述第一分辨率低于所述第二分辨率。。
39、从上述的技术方案可以看出,本申请提供的目标识别及定位方法,该方法可以应用于装配有相机的机器人;首先,本申请可以驱动相机以第一分辨率,对工作区域内各个方向进行全局扫描,确定目标物的位置范围;基于此,本申请可以较低分辨率初步识别目标物所在的大致范围,识别精度偏低,进一步提高识别效率;随后,可以驱动机器人移动所述相机,并利用所述相机以第二分辨率,对所述位置范围内的每一物品进行匹配识别,定位所述目标物的坐标位置,所述第一分辨率低于所述第二分辨率。基于此,本申请可以较高分辨率识别目标物的坐标位置,提高定位精度。可见,本申请在定位识别过程中,可以设置多种分辨率,在大视野中,减少需要精细识别的区域,在保证定位精度及识别精度的同时,提高定位效率及识别效率。
技术特征:
1.一种目标识别及定位方法,其特征在于,应用于装配有相机的机器人,包括:
2.根据权利要求1所述的目标识别及定位方法,其特征在于,所述驱动相机以第一分辨率,对工作区域内各个方向进行全局扫描,并确定目标物的位置范围,包括:
3.根据权利要求2所述的目标识别及定位方法,其特征在于,所述基于每个初步增强图像的判断结果,确定存在所述目标物的位置范围,包括:
4.根据权利要求1所述的目标识别及定位方法,其特征在于,所述驱动机器人移动所述相机,包括:
5.根据权利要求1所述的目标识别及定位方法,其特征在于,所述利用所述相机以第二分辨率,对所述位置范围内的每一物品进行匹配识别,定位所述目标物的坐标位置,包括:
6.根据权利要求5所述的目标识别及定位方法,其特征在于,所述对每个物品增强图像进行图像识别,判断每个物品增强图像是否对应于目标物,得到每个物品增强图像的判断结果,包括:
7.根据权利要求5所述的目标识别及定位方法,其特征在于,所述机器人还装配有激光雷达;
8.根据权利要求1-7任一项所述的目标识别及定位方法,其特征在于,还包括:
9.一种目标识别及定位系统,其特征在于,包括控制中心及装配有相机的机器人;
10.一种机器人,其特征在于,包括:
技术总结
本申请公开了一种机器人、目标识别及定位方法与系统,该方法可以应用于装配有相机的机器人;首先,本申请可以驱动相机以第一分辨率,对工作区域内各个方向进行全局扫描,确定目标物的位置范围;基于此,本申请以较低分辨率初步识别目标物所在的大致范围,提高识别效率;随后,可以驱动机器人移动相机,并利用相机以第二分辨率,对位置范围内的每一物品进行匹配识别,定位目标物的坐标位置,第一分辨率低于第二分辨率。基于此,本申请以较高分辨率识别目标物的坐标位置,提高定位精度。可见,本申请在定位识别过程中,可以设置多种分辨率,在保证定位精度及识别精度的同时,提高定位效率及识别效率。
技术研发人员:王毅,曲烽瑞,王喜军,曾松涛,葛佳菲,史东谷
受保护的技术使用者:广东电网有限责任公司广州供电局
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!