一种机器人及其悬空作业方法与流程
本发明涉及机器人,具体涉及一种机器人及其悬空作业方法。
背景技术:
1、机器人技术近年来发展迅速,机器人应用领域也随之不断扩大,如今被大量运用在工业应用中。现有的多轴机器人在工业应用上已经能够达到安全、精准的标准,也能够代替人在危险场景下重复工作,如:物流搬运、上下料、高空作业等等,尤其在数量及类型需求快速增长的高空作业领域,机器人具有明显的安全作业优势。
2、现有机器人在高空作业时,大多需通过外部吊运设备将其送达指定作业高度和区域,在到达作业区域后,再借助外部吊运设备实现吸附固定,进而开展作业。这种作业方式需安排大量人工操作吊运设备并与机器人协同配合,整个操作流程交叉配合较多,直接阻碍了作业效率的提高,且在面对超高建筑或难以布置外部设备的工作场景时,运送机器人的工作将更加繁琐。
技术实现思路
1、有鉴于此,本发明的目的是提供一种机器人及其悬空作业方法,解决现有机器人在高空作业时需通过外部吊运设备将其送达指定作业高度和区域,在到达作业区域后,再借助外部吊运设备实现吸附固定导致作业流程繁琐和作业效率低的问题。
2、为了解决上述技术问题,本发明所使用的技术方案是:
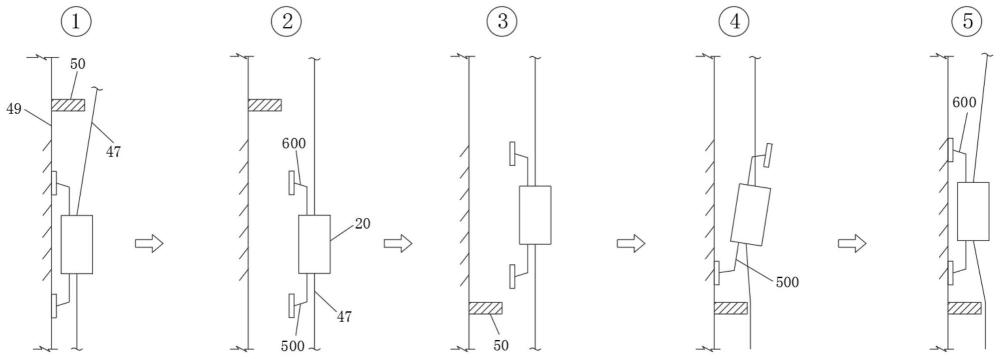
3、本发明所述的一种机器人,包括主体以及均与所述主体连接的第一组吸附脚和第二组吸附脚,所述机器人还包括与所述主体连接的牵引绳,所述机器人具有第一状态、第二状态和第三状态,所述机器人处于第一状态时,所述牵引绳悬吊所述机器人,所述第一组吸附脚和第二组吸附脚均未吸附在竖向设置的壁面上;所述机器人处于第二状态时,所述牵引绳悬吊所述机器人,控制所述机器人使所述机器人绕所述牵引绳在所述机器人上的系固点转动,从而使所述第一组吸附脚靠近所述壁面并吸附在所述壁面上;所述机器人处于第三状态时,所述第一组吸附脚和第二组吸附脚均吸附在所述壁面上;所述机器人从所述第一状态经过所述第二状态进入所述第三状态。
4、优选的,在所述第一状态、第二状态和第三状态,所述第二组吸附脚均位于所述第一组吸附脚的上方,在所述第二状态时,通过控制所述第二组吸附脚相对于所述主体向远离所述壁面的方向转动,使所述机器人重心变化,从而使所述第一组吸附脚靠近所述壁面。
5、进一步优选的,在所述第二状态时,当所述第一组吸附脚靠近所述壁面并吸附在所述壁面上后,控制所述第二组吸附脚相对于所述主体向靠近所述壁面的方向转动,使所述第二组吸附脚靠近所述壁面并吸附在所述壁面上,从而进入第三状态。
6、更进一步优选的,所述第一组吸附脚和所述第二组吸附脚均包括两个左右对称的机械腿,所述机械腿包括支撑臂、吸盘脚和脚踝组件,所述脚踝组件包括回正块以及位于所述回正块两侧的第一基座和第二基座,所述回正块设置有第一转动组件、第二转动组件、第一复位机构和第二复位机构,所述支撑臂通过所述第一基座与所述第一转动组件连接,所述吸盘脚通过所述第二基座与所述第二转动组件连接,且所述第一转动组件的转轴与所述第二转动组件的转轴的轴向互不平行;
7、所述第一复位机构与所述第一转动组件连接,所述第二复位机构与所述第二转动组件连接,当所述吸盘脚受到偏心外力后,所述吸盘脚可以围绕所述第一转动组件的转轴转动,和/或,围绕所述第二转动组件的转轴转动;
8、当所述偏心外力消除后,所述第一复位机构与所述第一转动组件配合,可使所述吸盘脚围绕所述第一转动组件的转轴反向转动而复位,所述第二复位机构与所述第二转动组件配合,可使所述吸盘脚围绕所述第二转动组件的转轴反向转动而复位。
9、更进一步优选的,所述第一转动组件和第二复位机构与所述第一基座位于同一侧,所述第二转动组件和第一复位机构与所述第二基座位于同一侧,其中,
10、所述第一转动组件包括竖向的第一转轴,所述第一转轴两端分别套设有第一轴承,且在两端所述第一轴承之间设置有第一齿轮,所述第一转轴与所述回正块连接;所述第一复位机构包括第一齿条、第一紧定螺钉、第二紧定螺钉、第一弹性件和第二弹性件,所述第一弹性件和所述第二弹性件分别位于所述第一齿条的两端,且所述第一齿条两端对应与所述第一弹性件和第二弹性件的一端连接,所述第一弹性件另一端与所述第一紧定螺钉连接,所述第二弹性件另一端与所述第二紧定螺钉连接,所述第一齿条与所述第一齿轮啮合连接;
11、所述第二转动组件包括横向的第二转轴,所述第二转轴两端分别套设有第二轴承,且在两端所述第二轴承之间设置有第二齿轮;所述第二复位机构包括第二齿条、第三紧定螺钉、第四紧定螺钉、第三弹性件和第四弹性件,所述第三弹性件和所述第四弹性件分别位于所述第二齿条的两端,且所述第二齿条两端对应与所述第三弹性件和第四弹性件的一端连接,所述第三弹性件另一端与所述第三紧定螺钉连接,所述第四弹性件另一端与所述第四紧定螺钉连接,所述第二齿条与所述第二齿轮啮合连接;
12、所述第一紧定螺钉、第二紧定螺钉、第三紧定螺钉和所述第四紧定螺钉均与所述回正块螺纹连接,所述第一轴承和所述第二轴承的外圈均与所述回正块固定连接,所述第一基座与所述第一转轴固定连接,所述第二基座与所述第二转轴固定连接。
13、更进一步优选的,所述第二转轴在所述第二轴承之间间隔设置有至少两个所述第二齿轮,且每个所述第二齿轮均有一套所述第二复位机构与之对应,和/或,所述支撑臂包括第一转动组件、第二转动组件、第三转动组件、第四转动组件、第五转动组件、第一连接臂和第二连接臂;
14、所述第一转动组件的第一端套设有第一外壳,所述第一外壳与所述主体连接,所述第二转动组件的第一端套设有第二外壳,所述第一转动组件的第二端与所述第二外壳连接,所述第二转动组件的第二端与所述第一连接臂的一端连接,所述第一转动组件能够驱动其第二端以其轴线为转轴转动,所述第二转动组件能够驱动其第二端以其轴线为转轴转动;
15、所述第三转动组件的第一端套设有第三外壳,第二端与所述第一连接臂的另一端连接,且所述第三外壳与所述第二连接臂的一端连接,所述第三转动组件能够驱动其第二端以其轴线为转轴转动;
16、所述第四转动组件的第一端与所述第二连接臂的另一端连接、第二端套设有第四外壳,所述第四转动组件能够驱动其第一端以其轴线为转轴转动;所述第五转动组件的第一端伸入所述第四外壳并与所述第四外壳连接、第二端与所述吸盘脚连接,所述第五转动组件能够驱动其第二端以其轴线为转轴转动。
17、优选的,所述主体上还设置有机械臂,所述机械臂包括a转动组件、b转动组件、c转动组件、d转动组件、e转动组件、f转动组件、第三连接臂和第四连接臂,所述a转动组件的第一端套设有第五外壳,所述b转动组件的第一端套设有第六外壳,所述a转动组件的第二端与所述第六外壳连接,所述b转动组件的第二端与所述第三连接臂的一端连接,所述a转动组件能够驱动其第二端以其轴线为转轴转动,所述b转动组件能够驱动其第二端以其轴线为转轴转动;所述第五外壳的第一端与所述主体连接;
18、所述c转动组件的第一端套设有第七外壳、第二端与所述第三连接臂的另一端连接,所述d转动组件的第一端与所述第七外壳连接、第二端套设有第八外壳,所述第八外壳与所述第四连接臂的一端连接,所述c转动组件能够驱动其第二端以其轴线为转轴转动,所述d转动组件能够驱动其第一端以其轴线为转轴转动;
19、所述e转动组件的第一端与所述第四连接臂的另一端连接、第二端套设有第九外壳,所述f转动组件的第一端套设有第十外壳,所述第十外壳与所述第九外壳连接,所述e转动组件能够驱动其第一端以其轴线为转轴转动,所述f转动组件能够驱动其第二端转动,且其第二端用于外接辅助构件;和/或,
20、所述机械臂展开时,所述第四连接臂位于所述第八外壳和所述第九外壳之间的净长不小于所述e转动组件的中心轴至所述f转动组件第二端的距离,所述b转动组件和所述c转动组件二者的中心轴间距不小于所述c转动组件和所述e转动组件二者的中心轴间距;
21、所述第五外壳第一端的周表面沿径向向外凸起形成凸环,所述凸环沿其圆周均布有数个与所述主体连接的紧固螺钉,且所述凸环凸起的厚度等于一个所述紧固螺钉的外径,所述f转动组件的第二端为模块化端口。
22、基于上述机器人,本发明还提供了一种机器人的悬空作业方法,包括如下步骤:
23、s1,利用所述机器人上的牵引绳将所述机器人运送到预定壁面高度;
24、s2,控制所述机器人绕所述牵引绳在所述机器人上的系固点转动,使所述机器人的第一组吸附脚向所述壁面靠近,当所述第一组吸附脚触贴所述壁面后,控制所述第一组吸附脚进行吸附;
25、s3,控制所述机器人的第二组吸附脚动作以触贴并吸附所述壁面。
26、优选的,在s2步骤中,通过控制所述第二组吸附脚向远离所述壁面的方向转动,来控制所述机器人的重心围绕所述系固点向所述壁面转动。
27、进一步优选的,还包括步骤s4:
28、当所述机器人在移动路径上遇到凸出所述壁面的障碍物时,所述第一组吸附脚和第二组吸附脚停止吸附并脱离所述壁面,所述牵引绳悬吊所述机器人;
29、通过操纵牵引绳,使所述机器人越过所述障碍物;
30、控制所述机器人绕所述牵引绳在所述机器人上的系固点转动,使所述第一组吸附脚向所述壁面靠近,当所述第一组吸附脚触贴所述壁面后,控制所述第一组吸附脚进行吸附,然后控制所述第二组吸附脚动作以触贴并吸附所述壁面。
31、相对于现有技术本发明所述的一种机器人的有益效果主要体现在:
32、本发明所述机器人可从悬吊时的所述第一状态,经过所述第二状态进入所述第三状态,从而完成对壁面的自主吸附,不需要依靠外部吊运设备和大量人力辅助来实现吸附固定,能够快速进入作业状态,可避免机器人高空作业中大量人力和物力的投入,且高空作业流程简单、自动化程度和作业效率高,可解决现有机器人在高空作业时需通过外部吊运设备将其送达指定作业高度和区域,在到达作业区域后,再借助外部吊运设备实现吸附固定导致作业流程繁琐和作业效率低的问题。
33、相对于现有技术本发明所述的一种机器人的悬空作业方法的有益效果主要体现在:
34、本发明方法中通过利用所述牵引绳将机器人运送到预定壁面高度,并通过控制所述机器人围绕所述牵引绳在所述机器人上的系固点转动,使所述第一组吸附脚向所述壁面靠近并动作吸附,然后控制所述第二组吸附脚动作来触贴并吸附所述壁面,从而能够实现机器人自主升降和吸附,而无需依靠外部吊运设备来实现,这样不仅精简了人力和设备投入,也大大简化了作业流程,提高了机器人高空作业的自动化程度和作业效率。
35、附图说明
36、通过附图中所示的本发明优选实施例更具体说明,本发明上述及其它目的、特征和优势将变得更加清晰。在全部附图中相同的附图标记指示相同的部分,且并未刻意按实际尺寸等比例缩放绘制附图,重点在于示出本发明的主旨。
37、图1为本发明实施例提供的一种机器人的示意图;
38、图2为本发明实施例提供的一种机器人的状态示意图;
39、图3为本发明实施例提供的机械腿的立体结构图;
40、图4为本发明实施例提供的脚踝组件的立体结构图一;
41、图5为本发明实施例提供的脚踝组件的内部结构图;
42、图6为本发明实施例提供的机械腿的爆炸结构图;
43、图7为本发明实施例提供的脚踝组件的立体结构图二;
44、图8为本发明实施例提供的机械臂的立体结构图;
45、图9为本发明实施例提供的机械臂的爆炸结构图;
46、图10为本发明实施例提供的机械臂折叠收存的状态示意图;
47、图11为本发明实施例提供的一种机器人的悬空作业方法的流程图;
- 还没有人留言评论。精彩留言会获得点赞!