一种基于气动肌肉驱动的三指灵巧手机构的制作方法
本发明属于机械灵巧手,涉及一种基于气动肌肉驱动的三指灵巧手机构。
背景技术:
1、抓取执行器应能实现对各类物体的抓持和操作。灵巧手是最可行的抓取执行器。传统的机器人多指灵巧手以刚性的关节型机械结构为主,每一根手指都是一个串联机械臂,研究以机械臂的运动学和动力学模型为基础,已经形成了较为成熟的理论和方法,例如目标物体聚类分析、抓持位形规划、抓持触点规划、抓持力分配、手指关节力分配、物体操控等。然而由于其缺少对目标物体的柔顺性和适应性,刚性机器人灵巧手难以实现对生产生活中的各类物体实施有效、安全的抓持和操作。
技术实现思路
1、为了解决现有技术中存在的上述技术问题,本发明提出了一种基于气动肌肉驱动的三指灵巧手机构,通过气泵来给气动肌肉充气,根据气动肌肉的收缩程度来用腱绳来动灵巧收的关节弯曲;同时采用角度传感器,来实时监测灵巧手各关节的弯曲程度,从而实现对物体有效抓持和操作,其具体技术方案如下:
2、一种基于气动肌肉驱动的三指灵巧手机构,包括气动肌肉驱动组件及其控制连接的三根相同结构的灵巧手指,所述灵巧手指包括3个依次连接的活动指关节,在各个活动指关节的连接处设有滑轮组;所述气动肌肉驱动组件包括气压源、气动肌肉和腱绳,所述气动肌肉由气压源提供气压变化来控制收缩,所述腱绳连接在气动肌肉和所述滑轮组之间,通过气动肌肉收缩来拉动腱绳,经由腱绳带动滑轮组转动,从而使活动指关节弯曲。
3、进一步的,所述的三指灵巧手机构还包括固定装置,所述固定装置包括:套筒、直线轴、上圆盘、固定支架、下圆盘以及螺旋固定组件;所述套筒底部固定在上圆盘上;所述三根相同结构的灵巧手指通过螺旋固定组件固定在所述套筒顶部;所述上圆盘和下圆盘上均设有若干个相对应的穿孔,其中包括支架穿孔和轴穿孔,所述固定支架经支架穿孔固定在上圆盘和下圆盘之间,所述直线轴穿设在轴穿孔处并连接固定所述气动肌肉。
4、进一步的,所述灵巧手指还包括一个固定指关节,所述的3个依次连接的活动指关节包括近指端关节、中指端关节、远指端关节,所述固定指关节一端通过所述螺旋固定组件固定在所述套筒顶部,另一端则与所述近指端关节通过滑轮组相连接。
5、进一步的,所述滑轮组采用主辅滑轮结构,包括:主滑轮、辅滑轮、连接轴以及与连接轴配合的轴承;所述连接轴包括主轮轴和辅轮轴,所述主轮轴穿接在相邻两个指关节的连接部上,与主轮轴配合的轴承位于主轮轴两端并固定在相邻侧的指关节上,所述主滑轮固定套设在主轮轴上随轴转动;所述辅轮轴固定在相邻侧的指关节上,所述辅滑轮通过与辅轮轴配合的轴承转动连接在辅轮轴上。
6、进一步的,所述连接轴采用d字轴。
7、进一步的,在各个活动指关节的连接处还设有扭簧,所述扭簧用以与其所在的活动指关节配合进行弹性复位。
8、进一步的,所述气压源由气泵、输气软管和调节阀组成,所述调节阀控制由气泵经输气软管通入气动肌肉的气压大小,来控制气动肌肉的收缩程度。
9、进一步的,在各个活动指关节外部均设有角度传感器,所述角度传感器实时监测获取各个活动指关节的弯曲角度参数。
10、有益效果:本发明的三指灵巧手机构,增强了手指系统的多功能性,减少了多指冗余导致的结构复杂性,降低了制作成本,提高了操控的灵巧性,实现对生产生活中的各类物体实施有效、安全的抓持和操作。
技术特征:
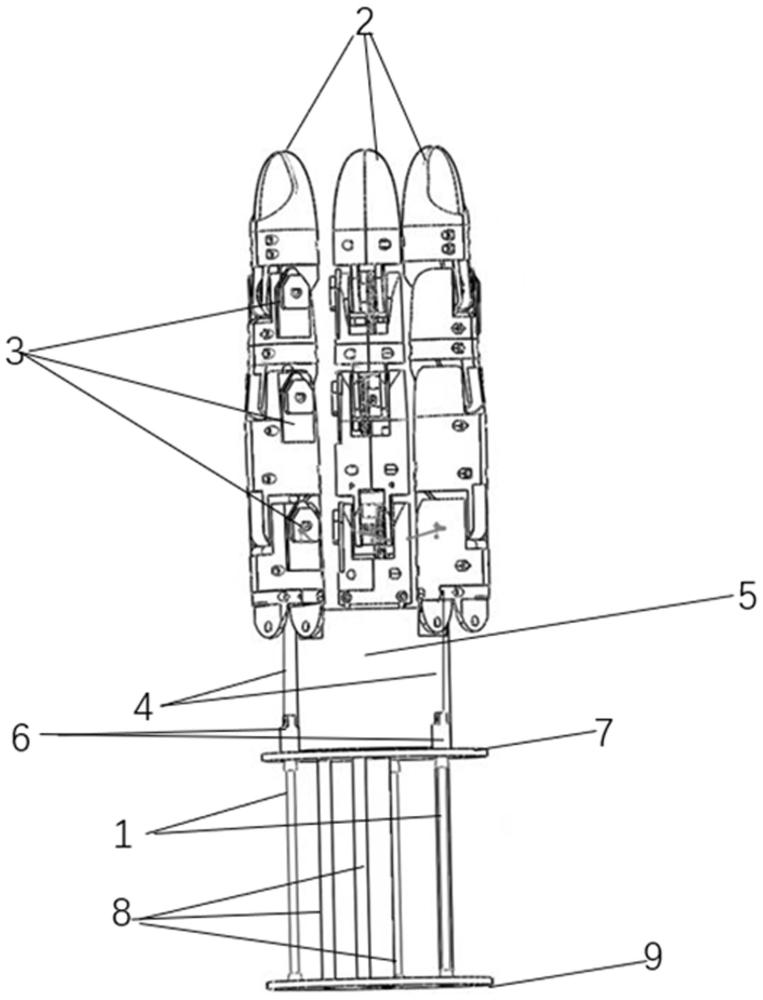
1.一种基于气动肌肉驱动的三指灵巧手机构,包括气动肌肉驱动组件及其控制连接的三根相同结构的灵巧手指(2),所述灵巧手指包括3个依次连接的活动指关节,其特征在于,在各个活动指关节的连接处设有滑轮组;所述气动肌肉驱动组件包括气压源、气动肌肉(1)和腱绳(4),所述气动肌肉(1)由气压源提供气压变化来控制收缩,所述腱绳(4)连接在气动肌肉(1)和所述滑轮组之间,通过气动肌肉(1)收缩来拉动腱绳(4),经由腱绳(4)带动滑轮组(10)转动,从而使活动指关节弯曲。
2.如权利要求1所述的一种基于气动肌肉驱动的三指灵巧手机构,其特征在于,所述的三指灵巧手机构还包括固定装置,所述固定装置包括:套筒(5)、直线轴(6)、上圆盘(7)、固定支架(8)、下圆盘(9)以及螺旋固定组件;所述套筒(5)底部固定在上圆盘(7)上;所述三根相同结构的灵巧手指(2)通过螺旋固定组件固定在所述套筒(5)顶部;所述上圆盘(7)和下圆盘(9)上均设有若干个相对应的穿孔,其中包括支架穿孔和轴穿孔,所述固定支架(8)经支架穿孔固定在上圆盘(7)和下圆盘(9)之间,所述直线轴(6)穿设在轴穿孔处并连接固定所述气动肌肉(1)。
3.如权利要求2所述的一种基于气动肌肉驱动的三指灵巧手机构,其特征在于,所述灵巧手指还包括一个固定指关节,所述的3个依次连接的活动指关节包括近指端关节(15)、中指端关节(16)、远指端关节(17),所述固定指关节一端通过所述螺旋固定组件固定在所述套筒(5)顶部,另一端则与所述近指端关节(15)通过滑轮组相连接。
4.如权利要求3所述的一种基于气动肌肉驱动的三指灵巧手机构,其特征在于,所述滑轮组采用主辅滑轮结构,包括:主滑轮、辅滑轮、连接轴以及与连接轴配合的轴承(14);所述连接轴包括主轮轴和辅轮轴,所述主轮轴穿接在相邻两个指关节的连接部上,与主轮轴配合的轴承(14)位于主轮轴两端并固定在相邻侧的指关节上,所述主滑轮固定套设在主轮轴上随轴转动;所述辅轮轴固定在相邻侧的指关节上,所述辅滑轮通过与辅轮轴配合的轴承(14)转动连接在辅轮轴上。
5.如权利要求4所述的一种基于气动肌肉驱动的三指灵巧手机构,其特征在于,所述连接轴采用d字轴。
6.如权利要求1所述的一种基于气动肌肉驱动的三指灵巧手机构,其特征在于,在各个活动指关节的连接处还设有扭簧(18),所述扭簧(18)用以与其所在的活动指关节配合进行弹性复位。
7.如权利要求1所述的一种基于气动肌肉驱动的三指灵巧手机构,其特征在于,所述气压源由气泵、输气软管和调节阀组成,所述调节阀控制由气泵经输气软管通入气动肌肉(1)的气压大小,来控制气动肌肉(1)的收缩程度。
8.如权利要求1所述的一种基于气动肌肉驱动的三指灵巧手机构,其特征在于,在各个活动指关节外部均设有角度传感器(3),所述角度传感器(3)实时监测获取各个活动指关节的弯曲角度参数。
技术总结
本发明属于机械灵巧手技术领域,涉及一种基于气动肌肉驱动的三指灵巧手机构,该机构包括气动肌肉驱动组件及其控制连接的三根相同结构的灵巧手指,所述灵巧手指包括3个依次连接的活动指关节,在各个活动指关节的连接处设有滑轮组;所述气动肌肉驱动组件包括气压源、气动肌肉和腱绳,所述气动肌肉由气压源提供气压变化来控制收缩,所述腱绳连接在气动肌肉和所述滑轮组之间,通过气动肌肉收缩来拉动腱绳,经由腱绳带动滑轮组转动,从而使活动指关节弯曲。本发明的三指灵巧手机构实现了对生产生活中的各类物体实施有效、安全的抓持和操作。
技术研发人员:周坤,马小龙,翟振,陶建平
受保护的技术使用者:余姚市机器人研究中心
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!