一种面向晶圆盒的大折展比机械臂及晶圆加工线
本发明涉及一种晶圆转运机械臂,尤其涉及面向晶圆盒的大折展比机械臂及晶圆加工线。
背景技术:
1、硅晶圆是所有半导体不可或缺的基础,是微芯片的基础。其性能从根本上决定了芯片的运行速度。硅晶圆的生产环境要求极高,所有进入制造空间的人与设备均需要无菌无尘。
2、在这一严格要求下,晶圆的加工线上所有工序都在真空无尘的环境下完成,并由单个机械臂以多流程串行的形式进行不同工序仓之间的转运,为提升运输效率,多个工序仓的间隔较近。
3、上述方案一方面限制了不同工序仓在空间中的位置范围,另一方面串行加工的效率不高。
技术实现思路
1、针对上述问题,现提供面向晶圆盒的大折展比机械臂及晶圆加工线,旨在有效解决现有技术中存在的问题。
2、具体技术方案如下:
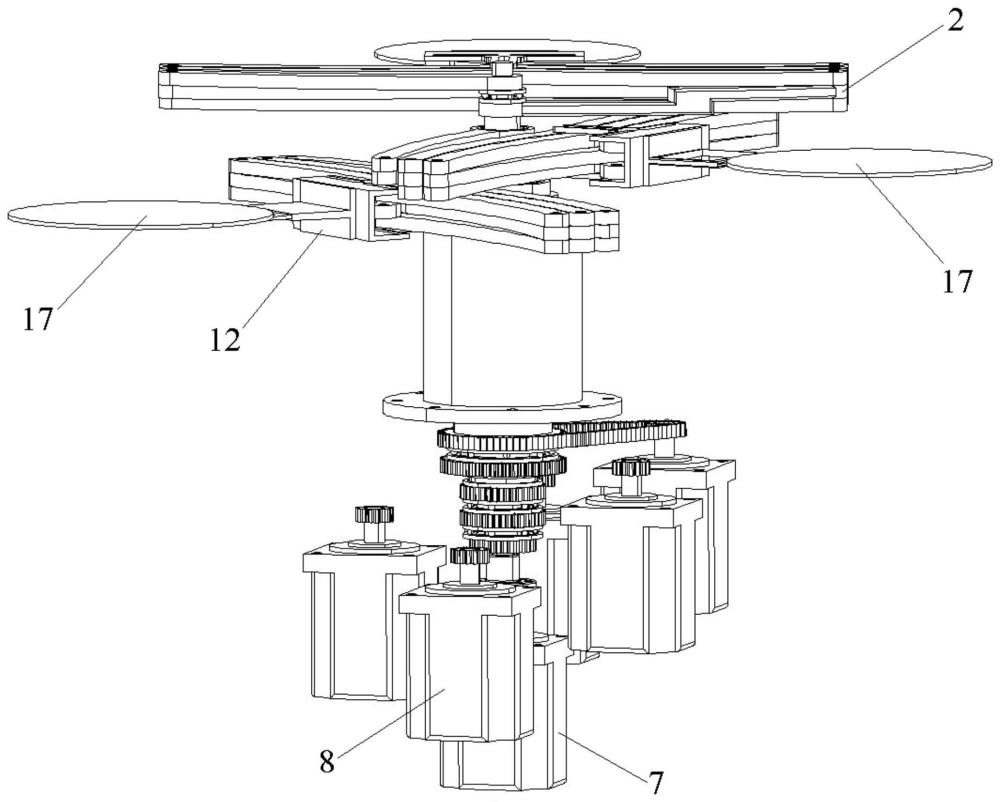
3、本发明的第一个方面是提供面向晶圆盒的大折展比机械臂,包括:
4、基座组件,包括安装基座;
5、至少一组抓取组件,用于水平伸展并承托晶圆,包括机械手部件及用于驱动机械手部件使机械手部件水平伸展的伸展部件;以及
6、至少一组折展组件,用于对应驱动伸展部件,安装于安装基座上。
7、进一步的,伸展部件为剪叉连杆。
8、进一步的,折展组件包括:
9、第一驱动套筒,转动安装于安装基座上,剪叉连杆的一端上部通过第一连接杆连接于第一驱动套筒上;以及
10、第二驱动套筒,转动安装于第一驱动套筒外围,剪叉连杆的一端下部通过第二连接杆连接于第二驱动套筒上。
11、进一步的,折展组件还包括:
12、第一驱动部件,用于驱动第一驱动套筒,安装于安装基座内,第一驱动套筒与第一驱动部件传动连接;以及
13、第二驱动部件,用于驱动第二驱动套筒,安装于安装基座内,第二驱动套筒与第二驱动部件传动连接。
14、进一步的,抓取组件及折展组件为多组时各组折展组件中的驱动套筒相互嵌套设置。
15、进一步的,机械手部件包括:
16、两根第三连接杆,两根第三连接杆的中部通过铰接销相互铰接,每根第三连接杆的一端对应铰接于剪叉连杆上,第三连接杆的另一端上设有定位销;
17、执行板,执行板上设有两个横向定位槽及至少两个纵向定位槽,铰接销的两端对应嵌设于横向定位槽中,定位销对应穿设于纵向定位槽中;以及
18、晶圆爪,用于承托晶圆,设于执行板上。
19、本发明的第二个方面是提供一种包括上述大折展比机械臂的晶圆加工线。
20、进一步的,晶圆加工线还包括具有多个晶圆加工工位的真空罩,高折展机械臂安装于真空罩的中心处。
21、上述方案的有益效果是:
22、1)本发明提供的机械臂整体折展比高,使得机械手可兼顾很远或很近的工序仓,使得各加工仓体的可布置空间范围大,更适用于柔性产线和多机械臂协同工作,可极大提升加工效率;
23、2)本发明中采用多驱动轴同轴连接且独立驱动的方式,可有效提升机构总体的紧凑程度,便于将其作为一基础工作模块进行扩展,实现多模块协作,进一步提升效率,降低空间和时间成本。
技术特征:
1.一种面向晶圆盒的大折展比机械臂,其特征在于,包括:
2.根据权利要求1所述的大折展比机械臂,其特征在于,所述伸展部件为剪叉连杆。
3.根据权利要求2所述的大折展比机械臂,其特征在于,所述折展组件包括:
4.根据权利要求3所述的大折展比机械臂,其特征在于,所述折展组件还包括:
5.根据权利要求1-4任一项所述的大折展比机械臂,其特征在于,所述抓取组件及所述折展组件为多组时各组所述折展组件中的驱动套筒相互嵌套设置。
6.根据权利要求2所述的大折展比机械臂,其特征在于,所述机械手部件包括:
7.一种晶圆加工线,其特征在于,包括权利要求1-6任一项所述大折展比机械臂。
8.根据权利要求7所述的晶圆加工线,其特征在于,所述晶圆加工线还包括具有多个晶圆加工工位的真空罩,所述高折展机械臂安装于所述真空罩的中心处。
技术总结
本发明涉及一种面向晶圆盒的大折展比机械臂及晶圆加工线,上述机械臂包括:基座组件,包括安装基座;至少一组抓取组件,用于水平伸展并承托晶圆,包括机械手部件及用于驱动机械手部件使机械手部件水平伸展的伸展部件;以及至少一组折展组件,用于对应驱动伸展部件,安装于安装基座上。本发明提供的机械臂整体折展比高,使得机械手可兼顾很远或很近的工序仓,使得各加工仓体的可布置空间范围大,更适用于柔性产线和多机械臂协同工作,可极大提升加工效率。
技术研发人员:刘胜,李洋,何祥洪,陈清扬,张沛东
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!