星表巡游机器人地面试验系统及试验方法与流程
本发明涉及空间机器人试验,尤其涉及一种星表巡游机器人地面试验系统及试验方法。
背景技术:
1、星表巡游机器人是一种空间服务机器人,可附着在目标航天器表面,在目标星表遍历巡游,对目标执行舱外状态检测、故障诊断以及维修维护等任务,近些年来一直是航天技术领域的研究热点之一。
2、星表巡游机器人的工作环境为空间微低重力环境,处在微低重力环境中的航天器受力状态与动力学特性明显不同于在地球重力环境下,为了在地面演示评估星表巡游机器人在目标航天器表面附着巡游过程,需要设计一种星表巡游机器人地面试验系统及试验方法。
3、传统的星表巡游机器人测试系统,如中国发明专利cn104859746b提供的仿壁虎机器人在微重力环境下的实验系统及地面实验方法,仅能实现对机器人的粘附测试,不能进行巡游机器人与目标星碰撞、巡游机器人在星表巡游对目标星扰动时目标星受力情况的模拟测试。
技术实现思路
1、为解决上述现有技术中存在的技术问题,本发明的目的在于提供一种星表巡游机器人地面试验系统及方法,可实现星表巡游机器人在不同速度、不同姿态下与目标卫星碰撞附着及在目标在目标星表巡游攀爬性能,并测试出机器人附着及巡游过程对目标星的扰动,以及目标星姿态机动时机器人的巡游稳定性的测试。
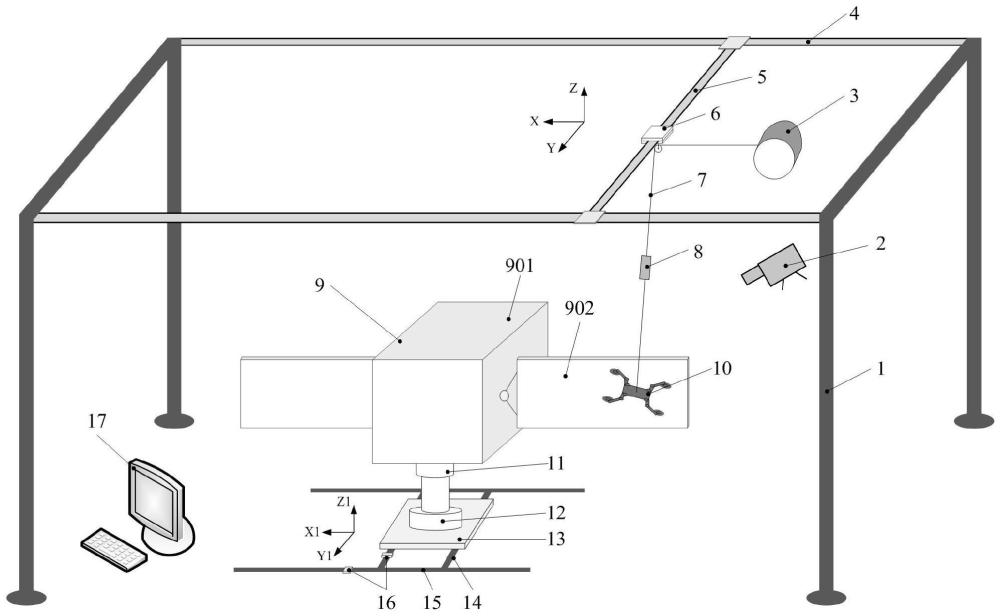
2、为实现上述发明目的,本发明提供一种星表巡游机器人地面试验系统,包括机架,还包括:
3、微重力提供装置,包括设置在所述机架上的悬吊滑轨,所述悬吊滑轨上设有移动滑块,所述移动滑块上设有恒力悬吊装置,所述恒力悬吊装置用于与机器人样机连接,为所述机器人样机提供微重力环境;
4、目标星姿态模拟装置,包括地面滑轨和在所述地面滑轨上滑动设置的移动支撑平台;所述移动支撑平台上设有多维测力台,目标星模拟样机设置在所述多维测力台的顶面上;
5、摄像机,设置在所述机架的下方;
6、控制机,与所述悬吊滑轨、所述地面滑轨、所述恒力悬吊装置、所述机器人样机和所述多维测力台及所述摄像机电连接,用于控制所述移动滑块在所述地面滑轨的滑动、控制所述恒力悬吊装置提供微重力环境、控制所述移动支撑平台在所述地面滑轨上的滑动和获取所述多维测力台的测量数据。
7、根据本发明的一个技术方案,所述悬吊滑轨包括:
8、第一悬吊驱动滑轨,其两个第一悬吊驱动滑轨副沿所述机架设置,两个所述第一悬吊驱动滑轨副平行设置;
9、第二悬吊驱动滑轨,与所述第一悬吊驱动滑轨垂直设置,其两端分别与两个所述第一悬吊驱动滑轨副滑动连接;所述第一悬吊驱动滑轨副上设有第一悬吊驱动装置,用于驱动所述第二悬吊驱动滑轨沿所述第一悬吊驱动滑轨移动,所述第一悬吊驱动装置与所述控制机电连接;
10、所述移动滑块设置在所述第二悬吊驱动滑轨上,所述第二悬吊驱动滑轨上设有第二悬吊驱动装置,用于驱动所述移动滑块沿所述第二悬吊驱动滑轨移动。
11、根据本发明的一个技术方案,所述恒力悬吊装置包括:
12、定滑轮,设置在所述移动滑块的底面上;
13、恒拉力装置,安装在所述机架上;
14、吊绳,其一端与所述恒拉力装置的输出端连接,其另一端通过所述定滑轮与所述机器人样机连接;
15、倾角传感器,设置在所述吊绳上,所述倾角传感器设置在所述定滑轮与所述机器人样机之间,所述倾角传感器和所述恒拉力装置与所述控制机电连接。
16、根据本发明的一个技术方案,所述地面滑轨包括垂直设置的第一低摩擦滑轨和第二低摩擦滑轨,所述第一低摩擦滑轨包括平行的两个第一低摩擦滑轨副,所述第二低摩擦滑轨包括平行的两个第二低摩擦滑轨副,所述第二低摩擦滑轨副设置在两个所述第一低摩擦滑轨副之间,其两端分别与两个所述第一低摩擦滑轨副滑动连接;所述移动支撑平台与所述第二低摩擦滑轨副滑动连接;所述第一低摩擦滑轨和所述第二低摩擦滑轨上均设有滑轨锁紧装置。
17、根据本发明的一个技术方案,所述目标星模拟样机包括目标星本体和设置在所述目标星本体两侧的太阳翼,所述目标星本体设置在所述多维测力台的顶面上。
18、根据本发明的一个技术方案,所述移动支撑平台与所述多维测力台之间设有伺服转台,所述伺服转台与所述控制机电连接。
19、根据本发明的一个方面,一种基于上述星表巡游机器人地面试验系统的试验方法,包括机器人与目标星碰撞附着试验和机器人在目标星上巡游攀爬试验。
20、根据本发明的一个技术方案,所述机器人与目标星碰撞附着试验包括以下步骤:
21、步骤s11、通过所述恒力悬吊装置与所述机器人样机连接,向所述机器人样机提供微重力环境;
22、步骤s12、通过所述目标星姿态模拟装置调整所述目标星模拟样机的旋转状态和姿态;
23、步骤s13、通过所述控制机驱动所述移动滑块在所述悬吊滑轨上移动,使所述机器人样机以不同的速度碰撞所述目标星模拟样机;
24、步骤s14、通过所述摄像机记录试验过程;通过所述多维测力台记录碰撞过程中所述目标星模拟样机受到的冲击力和扰动力矩。
25、根据本发明的一个技术方案,所述机器人在目标星上巡游攀爬试验包括以下步骤:
26、步骤s21、通过所述恒力悬吊装置与所述机器人样机连接,向所述机器人样机提供微重力环境;
27、步骤s23、将所述机器人放置在所述目标星模拟样机的表面;
28、步骤s22、通过所述目标星姿态模拟装置调整所述目标星模拟样机的旋转状态和姿态;启动所述机器人样机使其在目标星模拟样机巡游攀爬;
29、步骤s24、通过摄像机记录试验过程;通过多维测力台记录所述机器人样机巡游攀爬过程中所述目标星模拟样机受到的扰动力和扰动力矩。
30、本发明与现有技术相比,具有如下有益效果:
31、本发明提出的星表巡游机器人地面试验系统,通过目标星姿态模拟装置模拟目标星姿态,通过悬吊滑轨和恒力悬吊装置为机器人样机提供微重力环境,并通过悬吊滑轨模拟机器人与目标星的撞击,可实现对巡游机器人与目标星撞击和机器人巡游扰动的测试。本发明所提出的地面试验系统,结构简单、原理清晰、易于实现,可演示评估星表巡游机器人在不同速度、不同姿态下与目标卫星碰撞附着以及在目标星表巡游攀爬性能。
32、本发明中,目标星姿态模拟装置包括地面滑轨和设置在地面滑轨上的移动支撑平台,地面滑轨包括垂直设置的第一低摩擦滑轨和第二低摩擦滑轨,第一低摩擦滑轨和第二低摩擦滑轨上均设置滑轨锁紧装置,可对目标星模拟样机所处的空间状态进行切换,可实现对目标星的空间自由状态和受控状态的模拟,以便实现星表巡游机器人对空间自由态目标碰撞附着、星表巡游机器人在目标星表巡游时对自由状态下的目标星的扰动影响的测试分析,从而扩大试验的测试范围,提高模拟试验的真实性、精确性和可靠性。
33、本发明中,移动支撑平台与多维测力台之间设置伺服转台,可通过伺服转台控制目标星模拟样机转动,模拟其空间姿态机动,可测试分析目标星姿态机动时对机器人星表巡游稳定性的影响,进一步提高模拟试验的真实性和测试结果的准确性。
- 还没有人留言评论。精彩留言会获得点赞!