一种高速公路护栏上移动的监控机器人的制作方法
本发明涉及高速公路,具体为一种高速公路护栏上移动的监控机器人。
背景技术:
1、高速公路路况监控是为了实时了解和掌握高速公路上的交通情况,以提供准确的道路信息和保障交通安全而采取的一种措施,在高速公路上设置摄像头,通过视频监控系统可以实时监测道路上的交通流量、车速、交通事故等目标并进行记录,通过传感器、通信网络和数据处理系统相结合,能够提供准确、及时的高速公路路况信息。这些信息可以被相关部门用于交通管理、应急响应、路线规划等用途,也可以共享给驾驶员和普通用户,提高行车安全性和提供便利,高速公路护栏用于将车辆流向分隔开来,防止车辆穿越中央隔离带,从而有效避免对向车道之间的碰撞事故,高速公路护栏可以在车辆撞击时吸收部分冲击力,减少事故造成的伤害和破坏范围,高速公路护栏的材料和结构会因不同的地区和国家而有所不同,在中国,高速公路护栏主要采用镀锌钢制护栏,它们具有耐候性强、防腐能力好的特点,护栏的设计和安装需按照国家相关标准和规范执行,以确保其高强度、稳定性和安全性,钢制护栏包括立柱和护栏横梁,该种类型的护栏具有强度高、耐久性好的特点;
2、现有技术领域内,高速公路路况监控采用定点设置,导致只能监测到特定区域的路况信息,存在一些盲区,无法实时获取整个道路系统的全面情况,若采用轨道类机器人沿高速公路进行移动监控,则需要重新铺设机器人移动轨道,耗资较大难以实现。
技术实现思路
1、本发明的目的在于提供一种高速公路护栏上移动的监控机器人,以解决上述背景技术中所提出的问题。
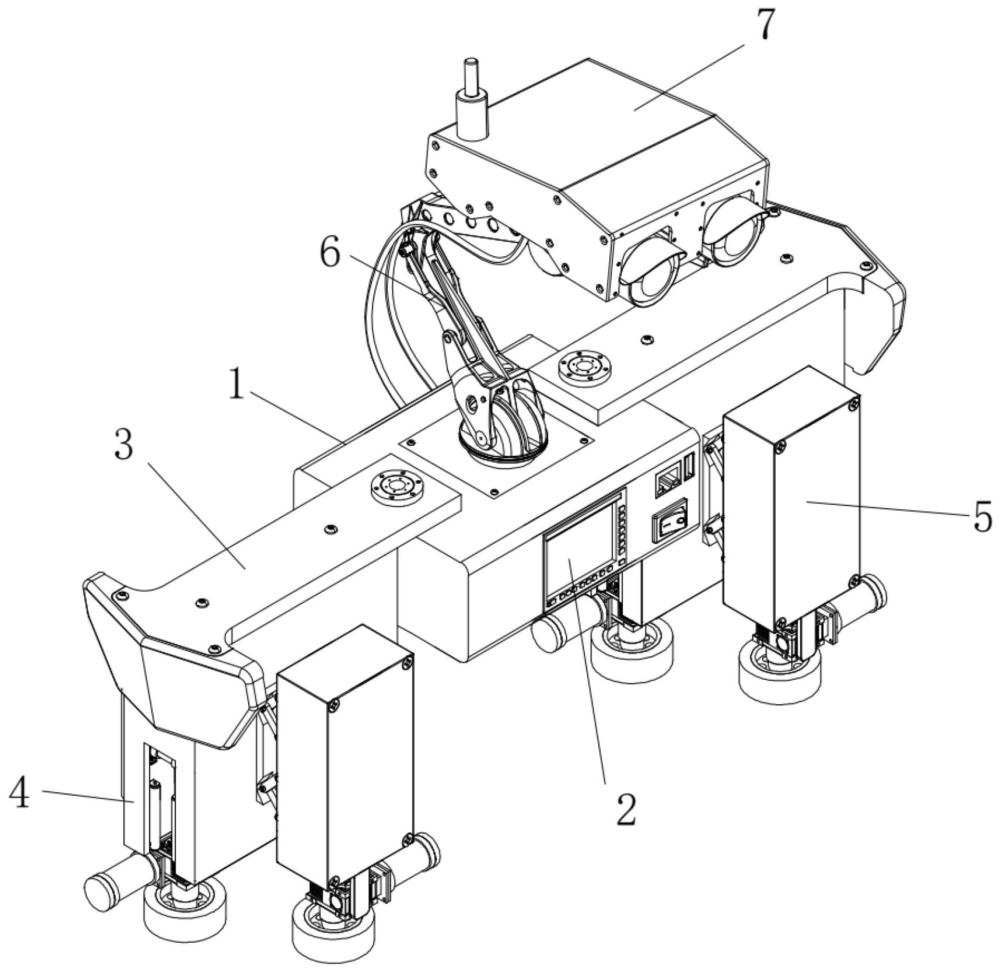
2、为实现上述目的,本发明提供如下技术方案:一种高速公路护栏上移动的监控机器人,包括:电池壳体、控制器、安装顶板、移动限位机构、外侧驱动机构、电动云台和监控摄像头;控制器内嵌在所述电池壳体的前侧,所述控制器和电池壳体电性连接;所述安装顶板的数量为两个,两个所述安装顶板分别通过销轴转动连接在电池壳体的顶端左右两侧中部;所述移动限位机构的数量为两个,两个所述移动限位机构分别设置在左右两个安装顶板的底部;所述外侧驱动机构的数量为两个,两个所述外侧驱动机构分别设置在左右两个移动限位机构的前侧;电动云台设置在所述电池壳体的顶端中部,所述电动云台和控制器电性连接;监控摄像头设置在所述电动云台的移动端顶部,所述监控摄像头和控制器电性连接。
3、优选的,所述移动限位机构包括:插槽外壳、槽体、转轴、连杆、第一电推杆、安装臂和第一驱动轮;插槽外壳固定安装在所述安装顶板的底部;槽体沿左右方向开设在所述插槽外壳的内腔后侧顶部;转轴沿左右方向通过轴承转动连接在所述插槽外壳的内腔后侧顶部;所述连杆的数量为两个,两个所述连杆一端分别固定连接在转轴的左右两侧;所述第一电推杆的数量为两个,两个所述第一电推杆一端分别通过销轴转动安装在插槽外壳的内腔前侧顶部左右两侧,两个所述第一电推杆的伸缩端分别与两个连杆的另一端通过销轴转动连接,所述第一电推杆和控制器电性连接;所述安装臂的数量为两个,两个所述安装臂分别设置在转轴的外壁左右两侧,所述安装臂后端贯穿槽体的内腔延伸出插槽外壳的外部;所述第一驱动轮的数量为两个,两个所述第一驱动轮分别设置在左右两个安装臂的前侧底部,所述第一驱动轮和控制器电性连接;其中,所述插槽外壳的内腔底端左右两侧均设置有限位组件,所述插槽外壳的内腔且位于左右两个限位组件内侧左右两端均设置有制动组件。
4、优选的,所述第一电推杆能够驱动连杆一端向后侧移动,使连杆带动转轴驱动两侧安装臂向内侧移动,两侧安装臂驱动对应位置上第一驱动轮向内侧移动与护栏内侧外壁接触。
5、优选的,所述限位组件包括:位置调节座、第一安装架、侧方限位辊轴和顶部限位轮;位置调节座沿前后方向固定安装在所述插槽外壳的内腔底部外侧;第一安装架安装在所述位置调节座的移动端底部;所述侧方限位辊轴的数量为四个,四个所述侧方限位辊轴分别安装在第一安装架的内侧四角;所述顶部限位轮的数量为两个,两个所述顶部限位轮分别安装在第一安装架的顶部左右两侧。
6、优选的,所述制动组件包括:第二安装架、制动杆、转动杆、第二电推杆、连接杆和连接轴;第二安装架固定安装在所述插槽外壳的内腔底部且位于位置调节座的内侧;所述制动杆的数量为四个,四个所述制动杆分别插接在第二安装架的内侧底端外侧;所述转动杆的数量为四个,四个所述转动杆一端分别通过销轴转动连接在前后两个制动杆的外侧,两个所述转动杆交叉设置,且交叉位置通过销轴转动连接;第二电推杆沿上下方向设置在所述第二安装架的顶部,所述第二电推杆和控制器电性连接;所述连接杆的数量为两个,两个所述连接杆分别通过销轴转动连接在前后两个转动杆的另一端,两个所述连接杆人字形设置;连接轴一端固定连接在所述第二电推杆的升降端外侧,所述连接轴的另一端外侧与两个连接杆的另一端通过轴承转动连接。
7、优选的,所述外侧驱动机构包括:固定板、菱形折叠架、第一移动块、双端电推杆、导轨、第二移动块和连接板;固定板沿上下方向固定安装在所述插槽外壳的前侧;所述菱形折叠架的数量为两组,每组所述菱形折叠架的数量为两个,两组所述菱形折叠架的一端分别安装在固定板的左右两侧上下两端;所述第一移动块的数量为两个,两个所述第一移动块沿左右方向分别安装在上下两组中左右两个菱形折叠架的内侧,上下两个所述第一移动块的左右两侧分别与上下两组菱形折叠架的内侧端通过销轴转动连接;双端电推杆设置在上下两个第一移动块的内侧,所述双端电推杆的上下两侧伸缩端分别与上下两个第一移动块的内侧固定连接,所述双端电推杆和控制器电性连接;所述导轨的数量为两个,两个所述导轨分别设置在上下两个第一移动块的外侧;所述第二移动块的数量为两个,两个所述第二移动块分别套接在上下两个导轨的外侧,上下两个所述第二移动块的左右两侧分别与上下两组菱形折叠架的外侧端通过销轴转动连接;连接板沿上下方向安装在上下两组菱形折叠架的另一端内侧。
8、优选的,所述外侧驱动机构还包括:外壳、第一齿轮、凸轮、卡槽框、第三安装架、第二驱动轮、驱动电机和第二齿轮;外壳沿上下方向固定安装在所述连接板的前侧,所述外壳的内腔底部与外部相通;第一齿轮通过轴承转动连接在所述外壳的内腔顶部;凸轮偏心连接在所述第一齿轮的轴心前侧;卡槽框卡接在所述凸轮的外侧;第三安装架沿上下方向设置在所述卡槽框的外侧,所述第三安装架的底部延伸出外壳的外部;第二驱动轮设置在所述第三安装架的后侧底部,所述第二驱动轮和控制器电性连接;驱动电机设置在所述外壳的内腔,所述驱动电机和控制器电性连接;第二齿轮设置在所述驱动电机的转动端,所述第二齿轮和第一齿轮啮合。
9、优选的,所述驱动电机驱动第二齿轮转动时,第一齿轮在第二齿轮的作用下驱动凸轮在卡槽框内侧偏心转动,卡槽框在凸轮旋转力的作用下驱动第三安装架呈矩形轨迹周向移动。
10、与现有技术相比,本发明的有益效果是:
11、1、通过第一电推杆伸长驱动连杆移动,使连杆驱动转轴带动两侧安装臂向内侧移动,两侧安装臂驱动对应位置上第一驱动轮向内侧移动与护栏内侧外壁接触,第一驱动轮和第二驱动轮内部电机驱动滚轮转动,第一驱动轮和第二驱动轮内部转轮沿护栏外壁内外两侧转动,进而使装置沿护栏外部进行移动,电动云台驱动监控摄像头转动至面向公路位置处,监控摄像头对公路路况进行监控。
12、2、通过双端电推杆驱动上下两侧第一移动块向外侧移动,两侧第二移动块沿导轨向内侧移动,两侧第一移动块和导轨驱动对应位置上菱形折叠架上下两端向内侧折叠,并在菱形折叠架的配合下驱动连接板带动外壳向前侧移动,外壳在第三安装架配合下驱动第二驱动轮向前侧移动出插槽外壳下方位置,驱动电机驱动第二齿轮转动,第一齿轮在第二齿轮旋转力的作用下驱动凸轮在卡槽框内侧偏心转动,卡槽框在凸轮旋转力的作用下驱动第三安装架呈矩形轨迹周向移动,进而使第三安装架驱动第二驱动轮由立柱顶部越过。
13、综上所述,本发明采用移动式监控,扩大路况监测的覆盖范围,减少盲区出现的可能,加强对高速公路上移动车辆和交通流动态变化的监测,并且将高速公路护栏作为机器人移动轨道,针对其的特殊结构能够翻越护栏立柱,以确保机器人能够在移动过程中保持平衡。
- 还没有人留言评论。精彩留言会获得点赞!