一种手臂外骨骼系统
本发明涉及人体外骨骼,尤其涉及一种手臂外骨骼系统。
背景技术:
1、当前,越来越多的工业企业开始将外骨骼装置(也称为外骨骼机器人)作为工人的辅助工具来使用,用于缓解或预防工人在工作过程中可能出现的腰椎劳损或其他肌肉骨骼疾病。已经有较多的手臂外骨骼装置投入市场中。
2、手臂的肘关节和前臂在日常活动中扮演着至关重要的角色,涉及到肘关节的伸展、弯曲运动、前臂的内旋和外旋运动。这些运动对于完成日常任务至关重要。因此,辅助手臂运动的手臂外骨骼具有更多的应用场景和更大的市场需求。但是,现有的手臂外骨骼装置仍然存在较多的问题。例如,部分可佩带的手臂外骨骼系统仅能够有效辅助或者驱动手臂进行上臂运动,对手臂前臂的动作的适配性较差,使得前臂的运动被局部约束。再例如,部分手臂外骨骼装置的前臂旋转机构通常采用固定的c型结构或整体圆形结构来束缚手臂,以使得手臂外骨骼系统能够跟随人体的手臂运动。固定的c型结构或整体圆形结构使得外骨骼装置变得笨重且难以适配不同尺寸的肢体。需要使用手臂外骨骼装置的人包括儿童和成人。儿童和成人的手臂尺寸差异较大,当前的手臂外骨骼装置无法同时适配儿童和成人。
3、例如,公开号为cn107835675a的专利申请公开了一种手臂支承外骨骼,其包括连接至手臂连杆机构的肩部基部。手臂连杆机构包括:被构造成围绕旋转关节相对于彼此旋转的近端连杆和远端连杆、适于将使用者的手臂连接至远端连杆的至少一个手臂连接器、连接至近端连杆和远端连杆并提供使远端连杆相对于近端连杆屈曲的力矩的张力产生器以及实质上位于旋转关节处的突出部。当远端连杆延伸超过肘节角度时,突出部限制张力产生器,并且张力产生器所提供的力矩保持为实质上较小。当突出部不限制张力产生器时,力矩倾向于使远端连杆相对于近端连杆屈曲,从而减小抬起使用者的手臂所需的人肩部的力和力矩。但是,该发明专利的外骨骼缺少对前臂的骨骼设置。
4、再例如,公开号为cn110815171a的专利申请公开了一种外骨骼,包括第一连杆和第二连杆,该第一连杆绕第一竖直轴线在横向平面中枢转,该第二连杆绕第二竖直轴线在横向平面中枢转。第二连杆耦接到第一连杆。臂支撑组件耦接到第二连杆并绕水平轴线枢转。该臂支撑组件包括弹簧,其用于产生抵消重力的辅助扭矩。该臂支撑组件为穿戴者的手臂提供辅助扭矩以支撑该穿戴者的手臂。该臂支撑组件还包括凸轮轮廓和凸轮从动件。该弹簧、凸轮从动件和凸轮轮廓之间的接触确定由该臂支撑组件提供的辅助力的量。套箍耦接到该臂支撑组件和穿戴者的手臂。该外骨骼同样仅支撑手臂的上臂,无法对手臂的前臂进行辅助运动。
5、再例如,公开号为cn114986478a的专利申请公开了一种手臂外骨骼。该手臂外骨骼包括肩部外骨骼、肘部外骨骼以及腕部外骨骼;肩部外骨骼、肘部外骨骼与腕部外骨骼依次连接。在手臂外骨骼根据控制指令进行主动运动,或跟随使用者的手臂运动进行从动运动的过程当中,通过肩部电机组模拟由人体的肩关节所引导的运动,通过肘部电机组模拟由人体的肘关节所引导的运动,并且通过腕关节组模拟由人体的腕关节所引导的运动。
6、再例如,公开号为cn112077827a的专利申请公开了一种仿竹结构的上肢外骨骼装置,包括:肩部内收外展关节、肩部屈伸关节、肘部屈伸关节、仿竹结构机械臂、驱动模块、背板支架以及电气系统;肩部内收外展关节与肩部屈伸关节通过l型工件相连接;肩部屈伸关节与肘部屈伸关节相连接;仿竹结构机械臂与肘部屈伸关节过盈配合;驱动模块与肩部内收外展关节、肩部屈伸关节、肘部屈伸关节分别相连。其束缚手臂以使得手臂外骨骼装置随手臂运动的结构就是典型的c形结构,较宽、坚硬且舒适度较差。该发明的前臂部位的外骨骼部分采用直线型结构来支撑前臂,使得前臂部位的外骨骼无法像人体的前臂一样做出内旋和外旋的运动动作。这使得该手臂外骨骼与前臂的贴合度较差,使用也不灵活。该发明专利中的肘部屈伸关节存在的缺陷包括:(1)体积冗大。肘部屈伸关节采用钢索驱动,但是钢索绕行的输出端和输入端分别固定在两块连接件上,加上这种阵列孔式、无法连续性尺寸调节的板件,导致体积臃肿过大;竹节圆筒体积冗余,非常浪费使用空间。
7、(2)无机械限位。该肘部屈伸关节没有设计机械限位,对于人体使用的穿戴器械,必须根据人肢体的运动极限范围设计机械式的限位,以防止软件层失控或其它不可控因素导致外骨骼运动超过人体关节极限。
8、(3)结构缺乏模块化,结构分散;安装、维护困难。由于部件之间没有模块化的连接,导致手臂外骨骼的可靠性低,稳定性差。如上所示,当前的手臂外骨骼,普遍存在的缺陷包括:(1)不能同时适用于儿童和成年人,即尺寸不方便调节;(2)束缚手臂部位的结构与手臂的贴合度较差,手臂外骨骼装置在使用时显得笨重,不够灵巧;(3)手臂外骨骼装置在肘关节部位和前臂部位的转动不够灵活,手臂外骨骼的结构难以配合前部进行内旋和外旋,导致部分企业在设计手臂外骨骼装置时放弃了前臂部位的外骨骼结构。
9、本发明希望提供一种手臂外骨骼系统,能够使得前臂部分也与人体前臂更好地贴合且实现灵活且自然的运动。
10、此外,一方面由于对本领域技术人员的理解存在差异;另一方面由于申请人做出本发明时研究了大量文献和专利,但篇幅所限并未详细罗列所有的细节与内容,然而这绝非本发明不具备这些现有技术的特征,相反本发明已经具备现有技术的所有特征,而且申请人保留在背景技术中增加相关现有技术之权利。
技术实现思路
1、由于人体前臂的转动比较灵活,机械结构无法与前臂的转动、移动准确匹配,因此现有技术中的手臂外骨骼系统,普遍着重于对手臂上臂的辅助。很多手臂外骨骼系统都选择不设置前臂结构,以避免不恰当的驱动角度对前臂活动形成阻碍。但是,人体前臂同样在日常使用中需要保护和得到手臂外骨骼的辅助。因此,本发明改进了手臂外骨骼的机械结构,提供了一种前臂结构能够精确驱动人体前臂内旋和外旋。
2、现有技术已经出现通过驱动绳索的牵引来实现人体前臂旋转的技术方案。例如,公开号为cn106691778a的专利文献公开了一种穿戴式外骨骼上肢康复机器人,包括手臂调整组件、肩关节屈伸组件、肩关节展收组件、上臂旋转运动组件、肘关节屈伸组件、前臂旋转运动组件、腕关节屈伸组件和机架电机组件;手臂调整组件固定在机架电机组件上,手臂调整组件、肩关节屈伸组件、肩关节展收组件、上臂旋转运动组件、肘关节屈伸组件、前臂旋转运动组件与腕关节屈伸组件之间依次连接。该技术方案能够实现肩关节的屈伸和内收外摆、上臂的内旋外旋、肘关节的屈伸、前臂的内旋外旋和腕关节的屈伸六个自由度以及手臂调整一个自由度的运动,其中的前臂的内旋外旋运动过程主要通过驱动前臂旋转从动轮的转动来实现。然而,该技术方案中的前臂旋转过程是将前臂限制在前臂旋转从动轮内,并通过直接作用于前臂实现其内外旋运动过程。一方面,人体的前臂内旋和外旋过程通常是由人体腕部的转动并带动前臂实现的,此种自然状态下的运动方式与该技术方案中通过直接作用于前臂来带动腕部的内外旋的运动过程完全相反,无法提供更适应于人体运动关系的辅助运动效果。另一方面,人体前臂在实现内外旋运动过程中,腕部的内外旋运动幅度显著大于前臂的内外旋运动幅度,如果仅依靠对前臂施加转动效果来实现相应的腕部的内外旋运动,前臂的转动控制范围相对较小,进而导致其整体的转动控制精度较低,并且一旦前臂整体的转动幅度过大,极易造成关节扭伤。
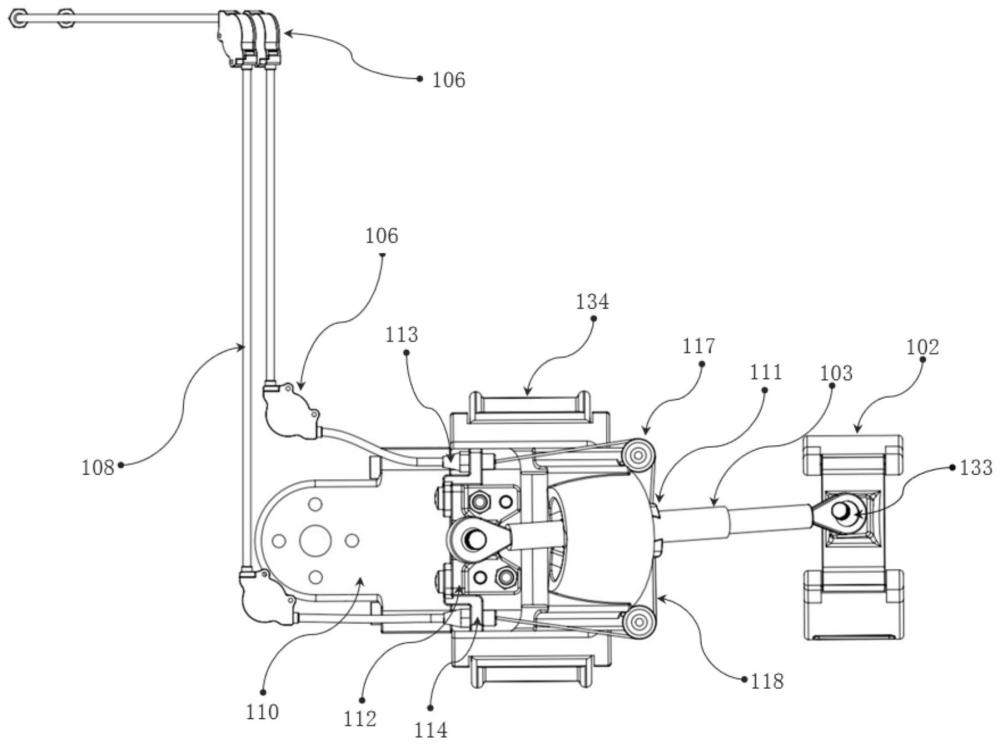
3、针对现有技术之不足,本发明从一个方面提供了一种手臂外骨骼系统,包括上臂单元、肘关节单元和前臂单元。上臂单元、肘关节单元和前臂单元依次机械连接,与电机连接的鲍登钢索、导向组件和前臂单元上的导向滑轮组合形成第一扭矩传动单元;前臂单元中的驱动杆与至少两组第一扭矩传动单元连接并由第一扭矩传动单元从两个相对方向牵引,在至少两组第一扭矩传动单元传送不同扭矩的情况下,驱动杆基于鲍登钢索中的钢索的牵引作用扭转,从而设置在驱动杆上的腕部约束组件随驱动杆适应性内旋或外旋。与上述现有技术相比,本发明的前臂单元中的驱动杆与至少两组第一扭矩传动单元连接并由第一扭矩传动单元从两个相对方向牵引,由此设置的驱动杆能够在实现转动的同时进行小幅度的摆动。基于上述区别技术特征,本发明要解决的问题可以包括:如何提供一种符合人体前臂和腕部真实内旋和外旋运动轨迹的辅助系统。具体地,人体腕部在执行正常的内旋或外旋运动过程中,将会带动前臂产生轻微的摆动幅度,如果仅依靠类似于上述现有技术将前臂整体进行转动的方式,无法与人体真实的腕部内外旋运动状态相适配,进而导致其辅助人体进行前臂内旋和外旋的准确度较低。相反地,本发明的驱动杆能够在牵引力的作用下同时实现转动与摆动过程,这是现有技术仅依靠夹持前臂的前臂旋转从动轮等结构所无法实现的。本发明通过第一扭矩传动单元牵引驱动杆在有限空间内转动并伴随较小幅度摆动的方式来驱动前臂内旋或外旋,进而模拟真实的人体上肢运动轨迹,使得前臂的行动更精确。
4、进一步地,与公开号为cn112077827a的专利申请公开的仿竹结构的上肢外骨骼装置相比,本发明的手臂外骨骼系统克服了其所具有的缺陷。首先,本发明的肘关节单元采用的钢索绕法非常巧妙,钢索的输入端与输出端不仅处于同一端,还使用了一个滑轮来重导向钢索,使其输入端与输出端尽可能靠近,极大地节省了使用空间,体积小巧紧凑。其次,本发明的肘关节单元还设计了机械限位结构,对人体肘关节的驱动起到机械保护的作用。另外,本发明的肘关节单元完全设计为封装一体的模块化结构,避免了多个组件之间的匹配和协调问题,运行可靠性和稳定性高。封装一体的模块化结构可以实现快速更换,安装、维护方便;而且封装一体的模块化结构的设计可以更好地保护组件不受外部环境影响。
5、根据一个优选实施方式,肘关节单元内设置有肘关节驱动绕盘,肘关节驱动绕盘与前臂单元机械连接,肘关节驱动绕盘与至少一个重定向滑轮和鲍登钢索组合形成第二扭矩传动单元;在第二扭矩传动单元传递电机的扭矩的情况下,肘关节驱动绕盘被钢索在竖直平面双向拉动并旋转以带动前臂单元进行伸展或弯曲的运动动作。本发明通过第二扭矩传动单元来转动前臂,实现前臂与肘关节的伸展和弯曲,能够使得前臂按照电机设定的扭矩来弯曲对应角度。
6、根据一个优选实施方式,上臂单元通过伸缩组件与肘关节单元连接,使得上臂单元和肘关节单元之间的距离基于不同尺寸的上臂部位调节。如此设置的优势在于,本发明的手臂外骨骼系统能够同时适用于成人和儿童,并且不会对儿童形成较大的负重。
7、根据一个优选实施方式,在第一扭矩传动单元中,至少一个导向组件设置在上臂单元外侧,至少一个导向组件设置在肘关节单元外侧,其中,导向组件引导钢索沿上臂部位和肘关节的轮廓延伸。与上述现有技术相比,本发明的第一扭矩传动单元能够通过导向组件沿上臂单元外侧与肘关节单元外侧布置。基于上述区别技术特征,本发明要解决的问题可以包括:如何降低上臂单元与肘关节单元相对转动过程中对前臂内外旋控制过程的影响。具体地,本发明的第一扭矩传动单元用于驱动人体前臂进行内旋和外旋运动,第一扭矩传动单元的途径过程需要经过上臂单元和肘关节单元,如果将第一扭矩传动单元以连续连接的方式设置在上臂单元和肘关节单元表面,那么上臂单元和肘关节单元的运动过程也将导致第一扭矩传动单元的行程发生变化,进而对前臂的控制过程造成影响而降低其控制准确性。为此,本发明通过在上臂单元和肘关节单元的连接处设置导向组件作为缓冲部件,能够确保第一扭矩传动单元中设置在上臂单元以及肘关节单元上的部件不会因上臂单元与肘关节单元的相对转动过程发生行程变化,由此确保第一扭矩传动单元控制的准确性。此外,通过导向组件来使得钢索有序弯曲,减少钢索在移动过程中的阻力。
8、根据一个优选实施方式,在肘关节单元中,至少一个重定向滑轮设置在肘关节外壳的开口附近,肘关节驱动绕盘与至少一个重定向滑轮由钢索以传动的方式连接,其中,钢索以可双向拉动肘关节驱动绕盘的方式缠绕在肘关节驱动绕盘上,并且从肘关节外壳的开口延伸出去,以使得肘关节驱动绕盘能够在被拉动的情况下转动。与上述现有技术相比,本发明能够通过设置重定向滑轮来对钢索的施力方向进行固定。基于上述区别技术特征,本发明要解决的问题可以包括:如何在肘关节驱动绕盘的转动过程中实现钢索的定向施力。具体地,如果缺少重定向滑轮,钢索的施力方向将随着肘关节驱动绕盘的转动时刻发生变化,进而导致钢索与肘关节单元内壁发生摩擦,或者导致钢索的施力不均等,这些因素都将导致肘关节单元损耗增加,极易发生机械故障。本发明通过设置重定向滑轮,能够将钢索的施力方向进行固定,以避免肘关节驱动绕盘的不同转动角度对钢索产生的不利影响。本发明将肘关节驱动绕盘与重定向滑轮传动连接,能够以简单的结构实现较复杂的肘关节弯曲或伸展的效果。
9、根据一个优选实施方式,肘关节单元还包括限位块,限位块与肘关节单元中的肘关节驱动绕盘的转动面接触以限制肘关节驱动绕盘的转动角度,以使得肘关节单元的转动角度与人体肘关节的转动角度相匹配。在手臂无法自主行动的情况下,手臂被动行动的安全需要重视。本发明通过对肘关节单元的弯曲角度的限制,保护了人体肘关节的安全。
10、根据一个优选实施方式,在前臂单元中,第一扭矩传动单元通过驱动组件来驱动驱动杆扭转,其中,驱动组件包括彼此相对固定的卡盘和钢索绞盘,卡盘以夹持驱动杆的方式设置,从第一扭矩传动单元延伸出的钢索缠绕在钢索绞盘上,在第一扭矩传动单元传动扭矩的情况下,钢索绞盘适应性转动并带动卡盘沿前臂的周向转动,使得驱动杆在卡盘的驱动下适应性内旋或外旋。若直接牵引驱动杆,容易磨损驱动杆。本发明通过驱动组件来移动驱动杆,能够在使得驱动杆稳定移动的情况下驱动腕部内旋或外旋。
11、根据一个优选实施方式,前臂单元中的驱动组件设置在前臂轴端固件的第一端,前臂轴端固件的第二端设置有固定基座,固定基座与驱动杆的第一端以可转动的方式连接;驱动杆的第二端以可转动的方式与腕部约束组件连接;前臂轴端固件的两侧设置有第二约束组件。驱动组件如此设置的优势在于,能够使得手臂腕部与肘关节之间的驱动杆能够适应性伸缩以驱动腕部内旋或者外旋。
12、根据一个优选实施方式,驱动杆为可伸缩的杆体,在驱动杆由驱动组件驱动并进行内旋或外旋的过程中,驱动杆的长度适应性伸缩。在手臂腕部内旋或者外旋的过程中,驱动杆的长度是动态变化的,因此,将驱动杆设计为可伸缩结构,不仅避免了整只手臂的包裹,同时在轻量化方面取得了最优效果。
13、根据一个优选实施方式,驱动组件设置在移位限制组件的空腔内,并且驱动杆贯穿移位限制组件,从而移位限制组件能够限制驱动杆的移动角度范围,以实现驱动杆在人体前臂部位的内旋或外旋的角度内移动。优选地,移位限制组件内部的空间结构根据与人体前臂尺寸及运动特征紧密相关的空间数学模型构建形成。移位限制组件内部的空间结构,使得移位限制组件能够更好地适应人体前臂的生理结构和运动需求,提高外骨骼系统对前臂内、外旋运动的控制精度和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!