一种配电室用巡检机器人的制作方法
本发明涉及配电室用巡检机器人,具体为一种配电室用巡检机器人。
背景技术:
1、散粮配电房为散粮装卸泊位的供电保障,承担着电能的输送和分配的功能,其设备的运行状态直接影响着电网的供电质量和可靠性,因此对配电室内的设备进行定期的巡检和维护,是保证电力系统正常运行的必要措施,配电室巡检机器人是一种利用机器人技术和人工智能技术,对配电室内的高压配电柜、开关柜等电力设备进行巡检和带电操作的智能设备,旨在提高配电室的智能化管理水平和安全保障能力,配电室巡检机器人的研发和应用,是电力行业智能化、自动化、信息化的重要体现,也是电力系统安全稳定运行的有效保障。
2、现有专利号为cn116423537a的中国专利公开了配电室巡检机器人,包括巡检机器人主体,所述巡检机器人主体呈l型,所述巡检机器人主体下端设置有移动轮和转向轮,所述巡检机器人主体的后侧设置有液晶显示屏和后置摄像监测装置,所述巡检机器人主体的上端设置有球形相机和环境检测模块,所述巡检机器人主体的左侧端设置有急停按钮、侧面超声波传感器和启停开关,所述巡检机器人主体的前侧壁上端设置有前侧超声波传感器、电量指示灯和监控装置,所述监控装置的前侧设置有激光雷达探测装置,所述激光雷达探测装置左右两侧均设置有环境检测模块,所述巡检机器人主体前后两侧壁的下端均设置有正面缓冲机构。
3、上述装置在使用时,通过升降电机以及下升降丝杆的配合实现升降板在上下方向上的移动,从而便于检测机构的高度调节,同时利用传动杆的导向槽与主动齿环内侧的导向滑块配合带动从动齿轮转动,进而带动上升降丝杆转动,实现支撑板的高度调节,通过上升降丝杆与下升降丝杆配合使用在实现检测机构高度调节的同时,增大升降调节的幅度,但在实际使用过程中,由于六轴机械臂伸展长度有限,当巡检机器人与配电柜距离较远时,导致六轴机械臂难以对配电柜进行带电操作,因此难以对六轴机械臂位置进行调节,使用效果不佳。
4、为此我们提出了一种配电室用巡检机器人
技术实现思路
1、本发明的目的在于提供一种配电室用巡检机器人,具备对六轴机械臂位置进行调节的优点,解决了背景技术中的问题。
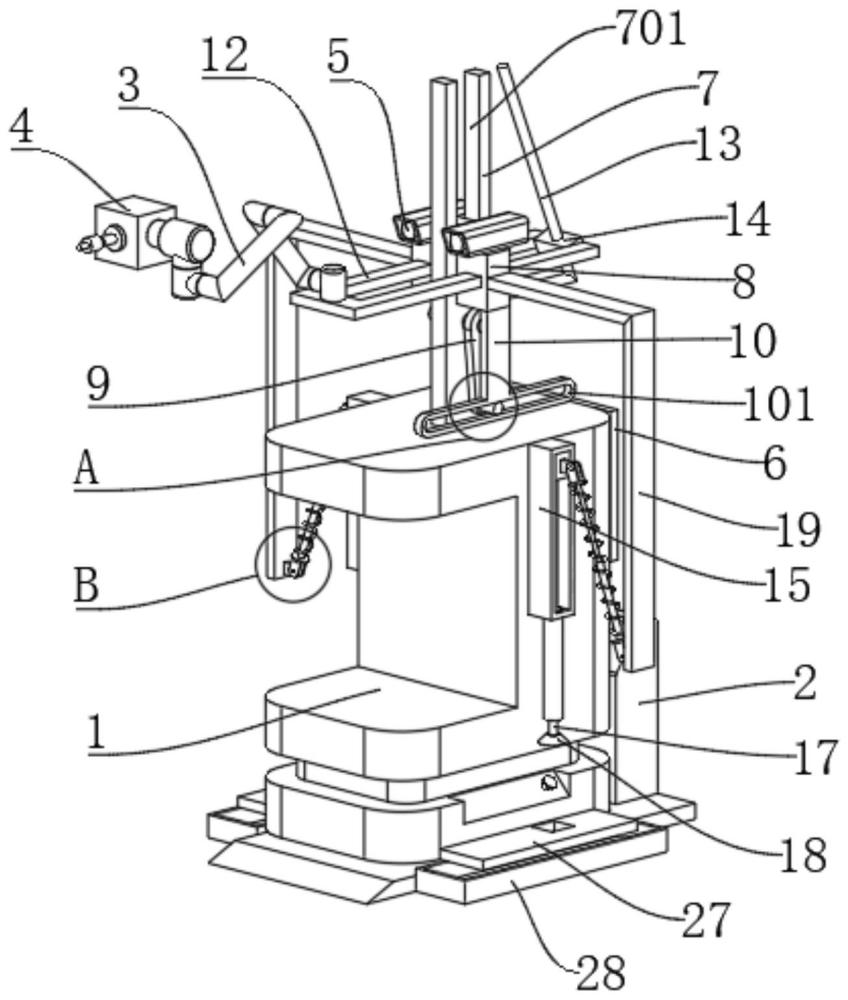
2、为实现上述目的,本发明提供如下技术方案:一种配电室用巡检机器人,包括hsr智能巡检机器人和对hsr智能巡检机器人进行充电的充电桩,所述hsr智能巡检机器人上设有进行六个自由度调节的六轴机械臂,所述六轴机械臂的末端设有对配电柜进行带电操作的操作末端工装,所述hsr智能巡检机器人上设有对配电柜运行状态进行实时监测的双光高清云台,所述hsr智能巡检机器人外轮廓上的一侧设有控制hsr智能巡检机器人上各部件协调运行的控制显示一体屏,所述hsr智能巡检机器人的顶部固定连接有固定杆,所述固定杆靠近顶端开设有第一通槽,所述第一通槽的内壁滑动连接有滑块,且控制显示一体屏与滑块的顶部固定连接,所述滑块上被贯穿并活动连接有n形架,且六轴机械臂远离操作末端工装的一端固定连接在n形架的一端,所述固定杆上设有对双光高清云台高度进行调节的调节机构和对六轴机械臂位置进行调节的辅助机构。
3、优选的,所述调节机构包括固定杆上靠近hsr智能巡检机器人的一端被贯穿并转动连接有由动力机构带动转动的转动杆,所述滑块上靠近转动杆的一端固定连接有t形杆,所述t形杆远离滑块的一端开设有第二通槽,且转动杆靠近第二通槽的一端固定连接有推动滑块进行升降往复移动的柱形块,且柱形块远离转动杆的一端贯穿至t形杆的内壁并活动连接,上述动力机构为通电后的电机。
4、优选的,所述辅助机构包括固定杆上的一侧固定连接有斜置杆,所述斜置杆的外轮廓上活动连接有推动n形架进行水平往复移动的套块,且n形架远离六轴机械臂的一端与套块固定连接。
5、优选的,所述hsr智能巡检机器人上设有对hsr智能巡检机器人进行限位的稳定机构,所述稳定机构包括hsr智能巡检机器人上的两侧对称位置均固定连接有矩形壳体,所述矩形壳体的内壁均活动连接有进行升降往复移动的矩形块,所述矩形块的底端均固定连接有柱形管,所述柱形管远离矩形块一端的外轮廓上均固定连接有与地面进行吸附固定的吸盘。
6、优选的,所述滑块与矩形壳体相对应的两侧对称位置上均固定连接有l形杆,两个所述l形杆远离滑块一端的相对面上均通过销轴转动连接有第一连接座,所述第一连接座上固定连接有套杆,所述套杆远离第一连接座一端的内壁均活动连接有进行轴向往复移动的插杆,所述插杆远离套杆的一端均固定连接有第二连接座,且第二连接座远离插杆的一端与矩形块通过销轴转动连接,所述第一连接座与第二连接座的相对面上固定连接有弹簧。
7、优选的,所述矩形壳体上设有对地面进行吹风的吹风机构,所述吹风机构包括矩形壳体的底端均被贯穿并固定连接有柱形壳体,且柱形管贯穿柱形壳体并活动连接,所述柱形壳体内壁的柱形管外轮廓上固定连接有对外部空气进行抽取和排放的活塞板,所述柱形管靠近活塞板底端的外轮廓上开设有通孔。
8、优选的,所述hsr智能巡检机器人上设有对地面扬尘进行吸附的清洁机构,所述清洁机构包括hsr智能巡检机器人靠近底端的两侧对称位置上均固定连接有对地面扬尘进行吸附的静电吸尘板,所述hsr智能巡检机器人靠近充电桩的一端固定连接有控制静电吸尘板通电和断电的按压开关,且按压开关与静电吸尘板通过电性连接。
9、优选的,所述充电桩底座的两侧对称位置上均固定连接有对静电吸尘板上灰尘进行收集的收集盒。
10、与现有技术相比,本发明的有益效果如下:
11、一、通过固定杆上设置的转动杆,启动电机,能够使电机带动转动杆在固定杆上进行定轴转动,通过转动杆上设置的柱形块,且t形杆上开设的第二通槽,则第二通槽对柱形块进行限位,伴随着转动杆进行定轴转动,从而t形杆在转动杆和柱形块的作用下推动滑块在第一通槽的内壁进行升降往复移动,使得滑块对双光高清云台的高度进行调节,增加了双光高清云台的拍摄范围,提高了转动杆的巡检能力。
12、二、伴随着滑块朝着远离hsr智能巡检机器人的竖直方向进行移动巡检时,从而套块在斜置杆的作用下推动n形架靠近六轴机械臂的一端朝着远离固定杆方向进行水平移动,使得n形架能够将六轴机械臂朝着靠近配电柜的方向进行移动,以便于六轴机械臂将操作末端工装伸展出去对配电柜进行带电操作,提高了六轴机械臂的实用性,避免了六轴机械臂伸展长度有限,当巡检机器人与配电柜距离较远时,导致六轴机械臂难以对配电柜进行带电操作。
13、三、当滑块拉动l形杆朝着远离hsr智能巡检机器人的方向同步进行移动时,使得第一连接座推动套杆朝着靠近第二连接座的方向进行轴向移动,且第一连接座和第二连接座上设置的弹簧,能够使弹簧在第一连接座的作用下进行挤压收缩,伴随着l形杆远离滑块一端移动至矩形壳体顶部的极限距离时,此时第一连接座与第二连接座处于倾斜状态,从而第二连接座在弹簧的弹力作用下推动矩形块快速移动至矩形壳体底端的极限距离,通过矩形块上设置的柱形管和吸盘,使得柱形管在矩形块的作用下推动吸盘快速移动至地面,且吸盘与地面接触将内部空气挤压出去,进而吸盘能够吸附在地面上,提高了hsr智能巡检机器人的稳定性,避免了六轴机械臂在带电操作时,造成hsr智能巡检机器人重心偏离发生移动,影响六轴机械臂带电操作的精准度。
14、四、伴随着柱形管带动吸盘朝着地面移动吸附时,能够使柱形管带动活塞板朝着柱形壳体远离矩形壳体的一端进行移动,此时柱形壳体远离矩形壳体一端的内部气压为负压,且柱形管上开设的通孔,从而柱形管在柱形管的作用下将柱形壳体远离矩形壳体一端的内部气体吹送至地面,将地面上的落尘吹散,使得吸盘吸附区域保持清洁,进一步提高吸盘的吸附效果和使用寿命,避免了吸盘与地面灰尘接触发生磨损,影响吸盘的吸附效果和使用寿命。
15、五、当hsr智能巡检机器人移动对配电室进行巡检时,此时按压开关对静电吸尘板进行通电,伴随着柱形管吹动地面上的落尘扬起,能够使静电吸尘板利用高压直流电场作用于带电颗粒物使颗粒物向电极移动并附着在静电吸尘板上,从而静电吸尘板能够将扬尘颗粒从气流中除去,伴随着hsr智能巡检机器人返回充电桩进行充电时,此时按压开关与充电桩接触并进行按压,能够使按压开关对静电吸尘板进行断电,通过充电桩上设置的收集盒,且收集盒与静电吸尘板位置相对应,进而静电吸尘板上的灰尘能够集中落在收集盒内进行集中收集。
16、通过上述结构的配合使用解决了,现有装置由于六轴机械臂伸展长度有限,当巡检机器人与配电柜距离较远时,导致六轴机械臂难以对配电柜进行带电操作,因此难以对六轴机械臂位置进行调节的问题。
- 还没有人留言评论。精彩留言会获得点赞!