核电厂巡检机器人及核电厂巡检机器人巡检方法与流程
本发明涉及核电,尤其涉及一种核电厂巡检机器人及核电厂巡检机器人巡检方法。
背景技术:
1、由于核岛内部在核电厂运行期间,部分区域存在较高的辐射剂量,因此在运期间核岛内部分关键设备无法进行巡检,为保证核岛内关键设备安全运行,人员会定期穿戴防护服进入部分高剂量区域进行人工巡检,对于部分超高剂量区域人员无法抵达,因此无法进行巡检。由于现有技术对于核岛内部巡检的局限性,极大降低核岛运行可靠性,影响核电机组稳定运行。人工巡检存在巡检效率低、巡检范围小、人员安全风险大等问题,而核岛内部目前未有网络覆盖,机器人无法完成远距离通讯,无法采用机器代替人工巡检。
技术实现思路
1、本发明要解决的技术问题在于,提供一种核电厂巡检机器人及核电厂巡检机器人巡检方法。
2、本发明解决其技术问题所采用的技术方案是:
3、第一方面:
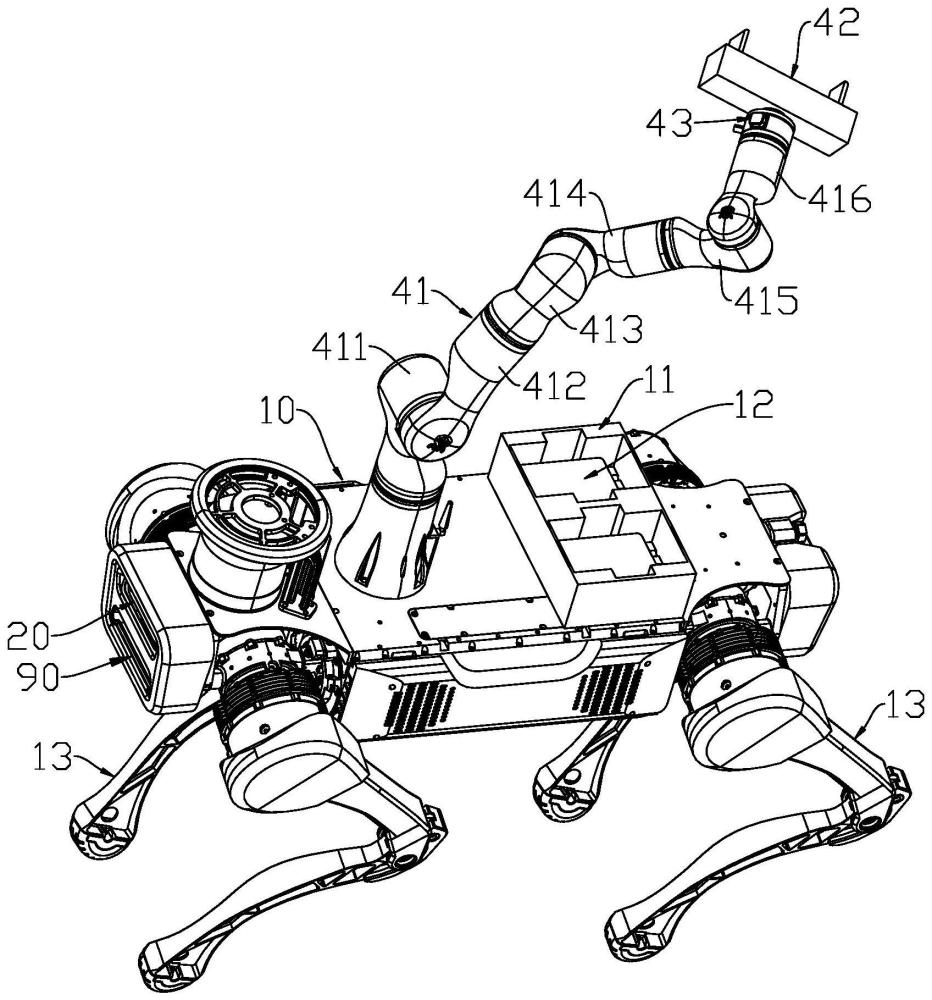
4、本发明构造一种核电厂巡检机器人,包括机器人本体,所述机器人本体具有相对的第一端与第二端,所述机器人本体的第一端设有摄像器;所述机器人本体上还设有激光雷达;
5、所述机器人本体上还设有自组网模块安装容器;所述自组网模块安装容器用于存放自组网模块;
6、所述机器人本体上设有执行机构,所述执行机构用于将所述自组网模块安装到预定位置。
7、在一些实施例中,所述执行机构包括机械臂以及夹爪,所述机械臂的一端与所述机器人本体连接,所述机械臂的另一端与所述夹爪连接。
8、在一些实施例中,所述夹爪包括安装架、驱动件、驱动锥齿轮、第一丝杆、第一滑块、第一轴承座、第一从动锥齿轮、第一夹爪部、第二丝杆、第二滑块、第二轴承座、第二从动锥齿轮、第二夹爪部;
9、所述驱动件安装于所述安装架上,所述驱动件的驱动端与所述驱动锥齿轮,所述第一丝杆安装于所述第一轴承座上,所述第一轴承座安装于所述安装架上,所述第一滑块可移动安装于所述第一丝杆上,所述第一夹爪部与所述第一滑块连接,所述第一丝杆的一端安装所述第一从动锥齿轮,所述第一从动锥齿轮与所述驱动锥齿轮啮合;
10、所述第二丝杆安装于所述第二轴承座上,所述第二轴承座安装于所述安装架上,所述第二滑块可移动安装于所述第二丝杆上,所述第二夹爪部与所述第二滑块连接,所述第二丝杆的一端安装所述第二从动锥齿轮,所述第二从动锥齿轮与所述驱动锥齿轮啮合,且所述第二从动锥齿轮与所述第一从动锥齿轮相对设置。
11、在一些实施例中,所述自组网模块安装容器内设有若干容置槽,每个所述容置槽的至少两侧设有夹爪夹持位。
12、在一些实施例中,所述机械臂靠近所述夹爪的一端设有视觉装置。
13、在一些实施例中,所述机器人本体上还设有深度相机。
14、在一些实施例中,所述机器人本体上还设有气体检测传感器。
15、在一些实施例中,所述机器人本体上还设有温湿度传感器。
16、在一些实施例中,所述机器人本体上还设有辐照检测传感器。
17、在一些实施例中,所述机器人本体上还设有声音识别传感器。
18、在一些实施例中,所述核电厂巡检机器人还包括与所述机器人本体连接的移动组件。
19、在一些实施例中,所述移动组件包括移动足、移动轮或者移动履带。
20、第二方面:
21、本发明还构造一种核电厂巡检机器人巡检方法,应用于上述任一项实施例所述的核电厂巡检机器人,包括以下步骤:
22、s1:所述核电厂巡检机器人按照预定轨迹进行巡检;
23、s2:所述核电厂巡检机器人通过所述执行机构将所述自组网模块安装到预定位置。
24、在一些实施例中,包括以下步骤:
25、s3:在完成巡检后,所述核电厂巡检机器人返回至所述预定位置回收所述自组网模块。
26、实施本发明具有以下有益效果:该核电厂巡检机器人可实现机器人巡检代替人工巡检,增加巡检效率及巡检范围,减少人员所受辐照剂量,为核电厂关键设备安全运行提供技术支撑。采用临时性组网方案,待巡检完成后将自组网模块回收,不影响核电厂关键设备安全运行,可减少人员工作强度。
技术特征:
1.一种核电厂巡检机器人,其特征在于,包括机器人本体(10),所述机器人本体(10)具有相对的第一端与第二端,所述机器人本体(10)的第一端设有摄像器(20);所述机器人本体(10)上还设有激光雷达(30);
2.根据权利要求1所述的核电厂巡检机器人,其特征在于,所述执行机构(40)包括机械臂(41)以及夹爪(42),所述机械臂(41)的一端与所述机器人本体(10)连接,所述机械臂(41)的另一端与所述夹爪(42)连接。
3.根据权利要求2所述的核电厂巡检机器人,其特征在于,所述夹爪(42)包括安装架(421)、驱动件(422)、驱动锥齿轮(423)、第一丝杆(424)、第一滑块(425)、第一轴承座(426)、第一从动锥齿轮(427)、第一夹爪部(428)、第二丝杆(429)、第二滑块(4210)、第二轴承座(4211)、第二从动锥齿轮(4212)、第二夹爪部(4213);
4.根据权利要求1所述的核电厂巡检机器人,其特征在于,所述自组网模块安装容器(11)内设有若干容置槽(111),每个所述容置槽(111)的至少两侧设有夹爪夹持位(112)。
5.根据权利要求2所述的核电厂巡检机器人,其特征在于,所述机械臂(41)靠近所述夹爪(42)的一端设有视觉装置(43)。
6.根据权利要求1所述的核电厂巡检机器人,其特征在于,所述机器人本体(10)上还设有深度相机。
7.根据权利要求1所述的核电厂巡检机器人,其特征在于,所述机器人本体(10)上还设有气体检测传感器(60)。
8.根据权利要求1所述的核电厂巡检机器人,其特征在于,所述机器人本体(10)上还设有温湿度传感器(70)。
9.根据权利要求1所述的核电厂巡检机器人,其特征在于,所述机器人本体(10)上还设有辐照检测传感器(80)。
10.根据权利要求1所述的核电厂巡检机器人,其特征在于,所述机器人本体(10)上还设有声音识别传感器(90)。
11.根据权利要求1至10任一项所述的核电厂巡检机器人,其特征在于,所述核电厂巡检机器人还包括与所述机器人本体(10)连接的移动组件(13)。
12.根据权利要求11所述的核电厂巡检机器人,其特征在于,所述移动组件(13)包括移动足、移动轮或者移动履带。
13.一种核电厂巡检机器人巡检方法,应用于权利要求1至12任一项所述的核电厂巡检机器人,其特征在于,包括以下步骤:
14.根据权利要求13所述的核电厂巡检机器人巡检方法,其特征在于,包括以下步骤:
技术总结
本发明公开一种核电厂巡检机器人及核电厂巡检机器人巡检方法,该核电厂巡检机器人包括机器人本体,所述机器人本体具有相对的第一端与第二端,所述机器人本体的第一端设有摄像器;所述机器人本体上还设有激光雷达;所述机器人本体上还设有自组网模块安装容器;所述自组网模块安装容器用于存放自组网模块;所述机器人本体上设有执行机构,所述执行机构用于将所述自组网模块安装到预定位置。该核电厂巡检机器人可实现机器人巡检代替人工巡检,增加巡检效率及巡检范围,减少人员所受辐照剂量,为核电厂关键设备安全运行提供技术支撑。采用临时性组网方案,待巡检完成后将自组网模块回收,不影响核电厂关键设备安全运行,可减少人员工作强度。
技术研发人员:董东升,吕一仕,段游,霍锐,傅俊锦,张文滔,梁志海,刘波,张波,张旭辰,王震,赵雪,李永涛,杨佳
受保护的技术使用者:阳江核电有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!