一种智能搬运机器人
本发明涉及搬运机器人,具体为一种智能搬运机器人。
背景技术:
1、随着科技的不断进步,机器人技术在各个领域的应用越来越广泛。在建筑行业中,由于建筑材料的多样性、重量和形状差异,传统的搬运方式往往存在效率低下、安全风险高以及人力成本大等问题。因此,开发一种能够智能搬运建筑材料的机器人技术,成为当前建筑行业技术创新的重要方向。
2、如现有技术公告号为cn217102056u的专利申请,该申请属于机器人技术领域,公开了一种建筑材料运输用机器人,包括运输箱、侧门、顶部支架及摄像头,运输箱上安装有用于将待运输的建筑材料夹持并放入运输箱内的夹持机构以及用于驱使运输箱前进的前进组件;夹持机构包括用于夹持建筑材料的夹持组件以及用于驱使夹持组件朝向运输箱内部摆动的摆动组件。该申请在需要运输建筑材料时,工作人员只需采用夹持组件对待运输的建筑材料进行夹持,随后采用摆动组件即可驱使夹持组件向运输箱内部摆动,调节夹持组件后,即可松开建筑材料,随后关闭侧门,通过前进组件即可驱使运输机器人前进,有利于工作人员对建筑材料进行搬运,机械代替人工,提高了搬运效率,减少了劳动力消耗。
3、上述现有技术通过设置机器人前行可实现机械代替人工,减少了劳动力消耗,而在实现使用中,因建筑材料形状的多样性,机器人在使用夹持功能对不同形态的建筑材料进行搬运时,对于平面和圆形材料的夹持效果存在显著差异,对于平面材料,夹爪能够轻易找到平衡点,并施加均匀的夹持力,实现稳定搬运,然而,对于圆形材料,夹爪与材料的接触方式转变为点对点,这大大降低了摩擦力,使得在搬运过程中圆形材料容易发生滑动或脱落,从而影响了搬运的稳定性和安全性,为此,我们提出一种智能搬运机器人。
技术实现思路
1、本发明的目的在于提供一种智能搬运机器人,以解决上述背景技术中提出的问题。
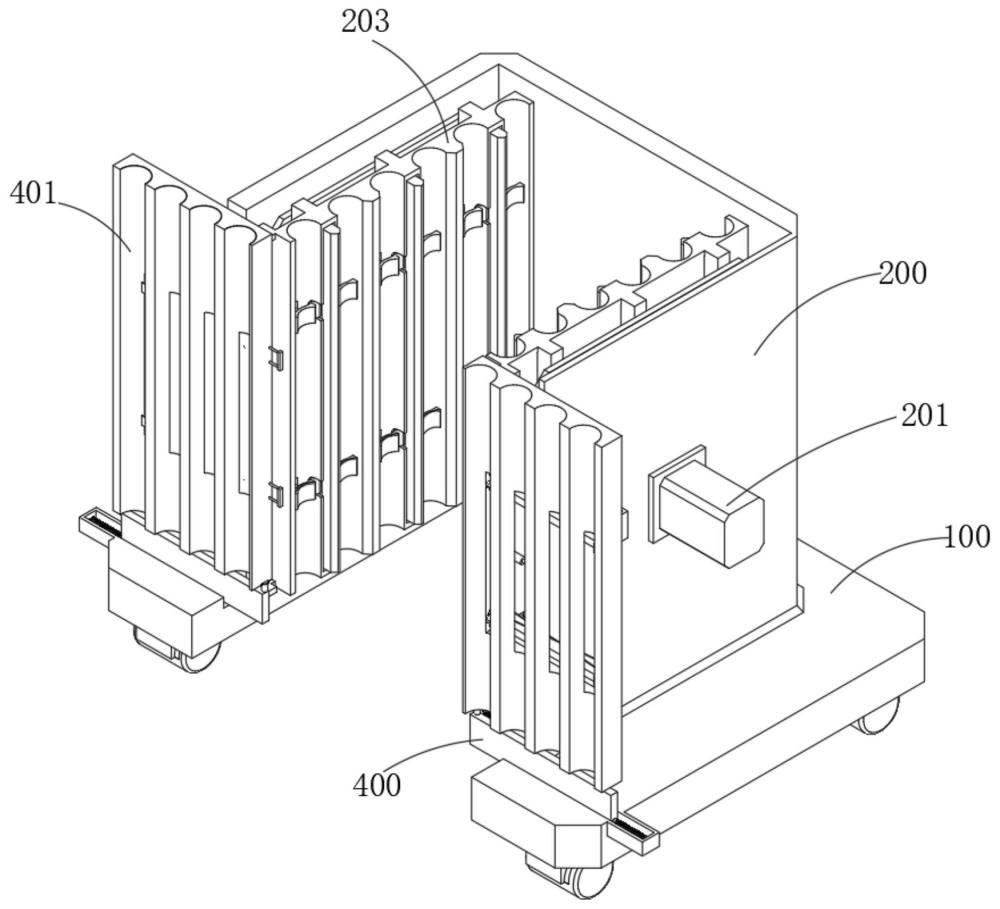
2、为实现上述目的,本发明提供如下技术方案:一种智能搬运机器人,包括内部开设有缺口的移动底座以及固定连接于其顶部且缺口外侧的缺口支架,所述缺口支架的内部对称设置有两个抵触板,两个所述抵触板相互靠近的一侧分别设置有对平面材料以及圆形材料进行夹持的搬运组件,所述移动底座的顶部且位于缺口支架的两侧对称设置有滑板,两个所述滑板顶部的一端分别设置有挡板,两个所述抵触板相互远离的一侧分别固定连接有移动板,所述缺口支架的两侧分别固定连接有输出端与移动板固定连接的驱动气缸,两个所述抵触板的一端分别转动连接有转杆;
3、所述搬运组件包括开设于两个抵触板一侧与圆形材料适配的多个弧形夹持槽,两个所述抵触板一侧且位于多个弧形夹持槽之间分别开设有凹槽,多个所述凹槽的内部分别设置有与平面材料适配的平面夹持板。
4、优选的,两个所述移动板的内部设置有与搬运组件适配的气路组件,所述气路组件包括固定连接于移动板内部的多个受气筒,多个所述受气筒的一侧分别滑动连接有与其适配的第一活塞杆,多个所述第一活塞杆远离受气筒的一端分别置于弧形夹持槽的内部且固定连接有橡胶垫,多个所述受气筒的内部分别固定连接有用于驱动第一活塞杆复位的弹簧。
5、优选的,多个所述凹槽的两端分别转动连接有翘板,所述翘板的一端与橡胶垫抵触,所述翘板的另一端可与平面夹持板抵触,多个所述凹槽的内部分别固定连接有伸缩端与平面夹持板固定连接的弹簧杆。
6、优选的,多个所述受气筒共同连通有连通管,所述连通管的一端连通有输气筒,所述输气筒的一端滑动连接有与其适配的第二活塞杆,所述第二活塞杆远离输气筒的一端转动连接有滚珠。
7、优选的,所述转杆的中端设置有与气路组件相互配合的传动组件,所述传动组件包括固定连接于转杆中端的弧形件,所述平面夹持板的一端固定连接有支撑件,所述支撑件远离平面夹持板的一端转动连接有曲柄,所述曲柄的一端与弧形件的一端转动连接,所述曲柄的内部开设有导槽,所述滚珠置于导槽的内部与其滑动连接。
8、优选的,所述转杆的外表面设置有驱动滑板移动的驱动组件,所述驱动组件包括固定连接于转杆外表面的折板,所述折板的一端分别与挡板的一侧抵触,所述滑板与挡板通过转轴连接,且转轴的外表面套有用于将挡板复位的扭簧,所述转杆的底部单向轴承连接有主动轴承,所述滑板的一侧固定连接有齿条,所述主动轴承的一侧设置有用于与齿条啮合的加速机构。
9、优选的,所述加速机构包括转动连接于抵触板内部且与主动轴承啮合的第一小齿轮,所述第一小齿轮的顶部固定连接有大齿轮,所述抵触板的内部且位于第一小齿轮的一侧转动连接有与齿条啮合的传动齿轮,所述传动齿轮的顶部固定连接有与大齿轮啮合的第二小齿轮。
10、优选的,所述移动底座的顶部开设有供滑板滑动连接的滑槽,所述滑槽的内部固定连接有伸缩端与滑板固定连接的拉力弹簧,所述滑板的内部开设有牵引槽,所述弧形件的底部延伸至牵引槽的内部抵触。
11、优选的,两个所述挡板的一端分别设置有加固板,两个所述挡板的一端分别开设有空腔,所述空腔内分别固定连接有滑杆,所述滑杆的一端固定连接有固定铰接座,所述滑杆的另一端滑动连接有活动铰接座,所述固定铰接座以及活动铰接座共同铰接有剪式伸缩架,所述剪式伸缩架远离固定铰接座以及活动铰接座的一端底部分别设置于加固板内,两个所述挡板相互靠近的一侧分别滑动连接有抵触件,所述抵触件的一端与活动铰接座固定连接,所述滑杆的外表面套设有缓冲弹簧,所述缓冲弹簧的一端与活动铰接座固定连接,且另一端与空腔固定连接,所述挡板的一侧固定连接有卡条,所述缺口支架的两侧开设有供卡条进入的卡槽。
12、与现有技术相比,本发明的有益效果是:
13、本发明设置移动底座可以减轻工人的体力负担,降低因操作不当或疲劳而导致的工伤事故风险,通过设置有搬运组件可以确保建筑材料在搬运过程中保持准确的位置和角度,提高建筑物的稳定性和安全性,而在气路组件的配合下可实现自动化提高效率,减少人工劳作,通过设置传动组件可实现封闭搬运,可有效防止建筑材料在运输过程中掉落或散落,避免对工人和周围环境造成伤害,封闭搬运能够大大降低工作场所的安全风险从而提高工作效率。
技术特征:
1.一种智能搬运机器人,包括内部开设有缺口的移动底座(100)以及固定连接于其顶部且缺口外侧的缺口支架(200),其特征在于:所述缺口支架(200)的内部对称设置有两个抵触板(203),两个所述抵触板(203)相互靠近的一侧分别设置有对平面材料以及圆形材料进行夹持的搬运组件,所述移动底座(100)的顶部且位于缺口支架(200)的两侧对称设置有滑板(400),两个所述滑板(400)顶部的一端分别设置有挡板(401),两个所述抵触板(203)相互远离的一侧分别固定连接有移动板(202),所述缺口支架(200)的两侧分别固定连接有输出端与移动板(202)固定连接的驱动气缸(201),两个所述抵触板(203)的一端分别转动连接有转杆(300);
2.根据权利要求1所述的一种智能搬运机器人,其特征在于:两个所述移动板(202)的内部设置有与搬运组件适配的气路组件,所述气路组件包括固定连接于移动板(202)内部的多个受气筒(206),多个所述受气筒(206)的一侧分别滑动连接有与其适配的第一活塞杆(207),多个所述第一活塞杆(207)远离受气筒(206)的一端分别置于弧形夹持槽(205)的内部且固定连接有橡胶垫(209),多个所述受气筒(206)的内部分别固定连接有用于驱动第一活塞杆(207)复位的弹簧。
3.根据权利要求2所述的一种智能搬运机器人,其特征在于:多个所述凹槽(210)的两端分别转动连接有翘板(212),所述翘板(212)的一端与橡胶垫(209)抵触,所述翘板(212)的另一端可与平面夹持板(204)抵触,多个所述凹槽(210)的内部分别固定连接有伸缩端与平面夹持板(204)固定连接的弹簧杆(211)。
4.根据权利要求3所述的一种智能搬运机器人,其特征在于:多个所述受气筒(206)共同连通有连通管(208),所述连通管(208)的一端连通有输气筒(213),所述输气筒(213)的一端滑动连接有与其适配的第二活塞杆(306),所述第二活塞杆(306)远离输气筒(213)的一端转动连接有滚珠(307)。
5.根据权利要求4所述的一种智能搬运机器人,其特征在于:所述转杆(300)的中端设置有与气路组件相互配合的传动组件,所述传动组件包括固定连接于转杆(300)中端的弧形件(302),所述平面夹持板(204)的一端固定连接有支撑件(304),所述支撑件(304)远离平面夹持板(204)的一端转动连接有曲柄(303),所述曲柄(303)的一端与弧形件(302)的一端转动连接,所述曲柄(303)的内部开设有导槽(305),所述滚珠(307)置于导槽(305)的内部与其滑动连接。
6.根据权利要求5所述的一种智能搬运机器人,其特征在于:所述转杆(300)的外表面设置有驱动滑板(400)移动的驱动组件,所述驱动组件包括固定连接于转杆(300)外表面的折板(301),所述折板(301)的一端分别与挡板(401)的一侧抵触,所述滑板(400)与挡板(401)通过转轴连接,且转轴的外表面套有用于将挡板(401)复位的扭簧,所述转杆(300)的底部单向轴承连接有主动轴承(308),所述滑板(400)的一侧固定连接有齿条(404),所述主动轴承(308)的一侧设置有用于与齿条(404)啮合的加速机构。
7.根据权利要求6所述的一种智能搬运机器人,其特征在于:所述加速机构包括转动连接于抵触板(203)内部且与主动轴承(308)啮合的第一小齿轮(309),所述第一小齿轮(309)的顶部固定连接有大齿轮(310),所述抵触板(203)的内部且位于第一小齿轮(309)的一侧转动连接有与齿条(404)啮合的传动齿轮(312),所述传动齿轮(312)的顶部固定连接有与大齿轮(310)啮合的第二小齿轮(311)。
8.根据权利要求7所述的一种智能搬运机器人,其特征在于:所述移动底座(100)的顶部开设有供滑板(400)滑动连接的滑槽(405),所述滑槽(405)的内部固定连接有伸缩端与滑板(400)固定连接的拉力弹簧(403),所述滑板(400)的内部开设有牵引槽(402),所述弧形件(302)的底部延伸至牵引槽(402)的内部抵触。
9.根据权利要求8所述的一种智能搬运机器人,其特征在于:两个所述挡板(401)的一端分别设置有加固板(500),两个所述挡板(401)的一端分别开设有空腔,所述空腔内分别固定连接有滑杆(501),所述滑杆(501)的一端固定连接有固定铰接座(502),所述滑杆(501)的另一端滑动连接有活动铰接座(503),所述固定铰接座(502)以及活动铰接座(503)共同铰接有剪式伸缩架(508),所述剪式伸缩架(508)远离固定铰接座(502)以及活动铰接座(503)的一端底部分别设置于加固板(500)内,两个所述挡板(401)相互靠近的一侧分别滑动连接有抵触件(505),所述抵触件(505)的一端与活动铰接座(503)固定连接,所述滑杆(501)的外表面套设有缓冲弹簧(504),所述缓冲弹簧(504)的一端与活动铰接座(503)固定连接,且另一端与空腔固定连接,所述挡板(401)的一侧固定连接有卡条(506),所述缺口支架(200)的两侧开设有供卡条(506)进入的卡槽(507)。
技术总结
本发明涉及搬运机器人技术领域,具体为一种智能搬运机器人,包括内部开设有缺口的移动底座以及固定连接于其顶部且缺口外侧的缺口支架,缺口支架的内部对称设置有两个抵触板,两个抵触板相互靠近的一侧分别设置有对平面材料以及圆形材料进行夹持的搬运组件,移动底座的顶部且位于缺口支架的两侧对称设置有滑板,两个滑板顶部的一端分别设置有挡板,两个抵触板相互远离的一侧分别固定连接有移动板,缺口支架的两侧分别固定连接有输出端与移动板固定连接的驱动气缸,两个抵触板的一端分别转动连接有转杆。通过设置搬运组件可对不同形状的材料进行夹持,提高抵触板与不同形状建筑材料之间的摩擦力,加强夹持强度。
技术研发人员:兰文宝
受保护的技术使用者:哈尔滨学院
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!