一种防火巡检机器人及其使用方法与流程
本发明涉及防火机器人,特别涉及一种防火巡检机器人及其使用方法。
背景技术:
1、近年来,大型仓库发生了多起火灾事故,严重影响行业安全生产的同时也会在部分事故中出现了人员伤亡事件和大量经济损失,因此仓库里的巡检工作就是非常有必要的,可以有效减少安全隐患和经济损失,仓库内部巡检主要靠机器人,机器人的方式效率高且不容易出错,对于一些条件差的环境,巡检机器人也可以胜任工作。
2、在公告号为“cn215309883u”的专利中公告了一种电厂用多功能防火智能巡检机器人,包括底座,底座上表面固定连接有装置本体,装置本体内部固定设有蓄电池,蓄电池一侧设有处理器,处理器一侧表面固定连接有温度分析计算模块,温度分析计算模块一侧表面固定连接有温度传感器,本实用新型中,通过设置的火警自动报警器、干粉灭火器和二氧化碳灭火器,能够第一时间对火灾进行紧急处理,防止火势蔓延,无需工作人员小时监控,避免人工监控产生漏洞导致不能及时发现火灾并报警的问题,减少人工成本的同时增强火灾监视效率,并能够及时发现火情并对初期火情进行有效控制,省去了从发现火情至人员到位而产生的时间差。
3、但是现有技术和现有专利存在如下问题:
4、在机器人巡检的过程中可以对着火点进行紧急处理,但是着火点附近还存在一定的安全隐患,在巡检的过程中只是单单处理了该着火点,处理完毕后进行巡检,在巡检的过程中该点还有可能二次着火,再次发现处理就不及时,会耽误处理时间。
5、机器人在巡检的过程中需要按照规定的路线进行巡检,在转弯处多个轮胎需要同时联动,导致转弯半径较大,会磕碰机器人的外壳导致部件或者被撞击物体受损,灵活性较差。
技术实现思路
1、本发明的主要目的在于提供一种防火巡检机器人及其使用方法,可以有效解决背景技术中在机器人巡检的过程中可以对着火点进行紧急处理,但是着火点附近还存在一定的安全隐患,在巡检的过程中只是单单处理了该着火点,处理完毕后进行巡检,在巡检的过程中该点还有可能二次着火,再次发现处理就不及时,会耽误处理时间,并且机器人在巡检的过程中需要按照规定的路线进行巡检,在转弯处多个轮胎需要同时联动,导致转弯半径较大,会磕碰机器人的外壳导致部件或者被撞击物体受损,灵活性较差的问题。
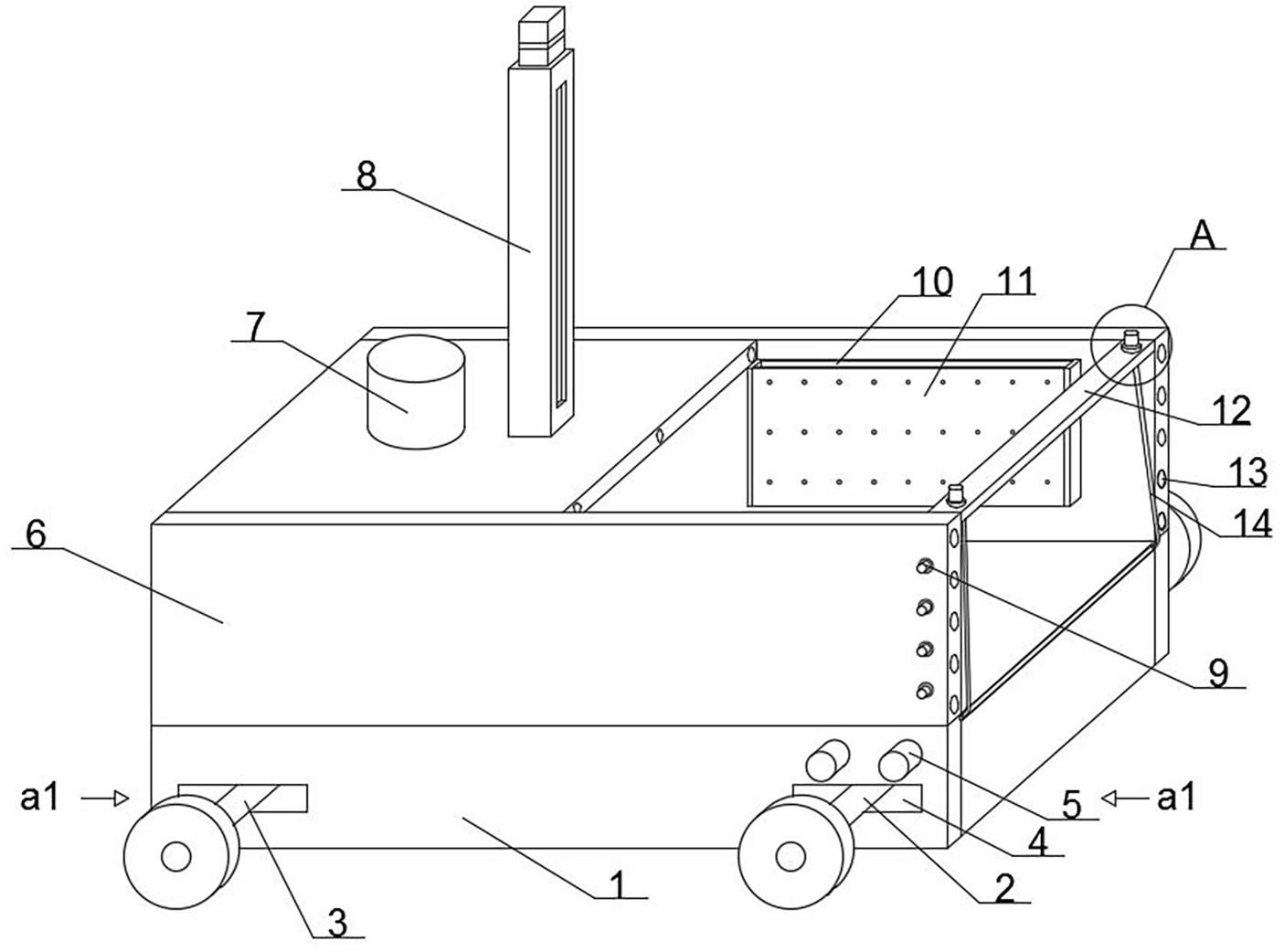
2、为实现上述目的,本发明采取的技术方案为:本发明之一种防火巡检机器人,包括底座,所述底座的顶端固定连接有固定框,所述底座的内部设置有驱动组件,所述固定框的顶端一侧设置有l型板,所述固定框的内部设置有输水组件,所述输水机构的一侧设置有限位组件;
3、所述驱动组件包括第一驱动轴、第二驱动轴、温度检测器、固定柱、固定环、连接轴承和驱动装置,所述底座的内部对称开设有两个转向槽,所述第一驱动轴和第二驱动轴分别设置在对应的转向槽内部,所述第一驱动轴的中部设置有活动轴承,所述第一驱动轴以活动轴承的平分线为平分线对称设置有固定柱,所述固定柱的表面固定连接有卡接齿,所述固定柱的底端设置有驱动装置,所述驱动装置的输出端转动连接有传动带,所述传动带的内壁固定连接有轮齿,所述卡接齿与传动带内壁顶端的轮齿相啮合,所述驱动装置的底端设置有承重板,所述承重板的中部设置有微型电机,所述微型电机的输出端设置有转轴,所述转轴延伸至驱动装置的内部,所述承重块的内部设置有伸缩环,所述底座的正面一侧设置有两个温度检测器,两个所述温度检测器的内部均设置有热膨胀块,所述热膨胀块的一端固定连接有连接管道的一端,所述连接管道的另一端延伸至其中一个伸缩环的内部,所述热膨胀块、连接管道和伸缩环形成一个密闭空间;
4、所述输水组件包括第一气缸、冷却池、水箱、驱动柱、压板、分隔板和限位板,所述固定框、l型板和分隔板形成水箱,所述分隔板靠近l型板的一侧设置有限位板,所述限位板的高度小于分隔板的高度,且所述限位板和分隔板的顶端均延伸至l型板的壳体内部,所述l型板的顶端设置有第一气缸,所述第一气缸的底端设置有驱动柱,所述驱动柱的底端固定连接有压板,所述水箱的顶端一侧设置有第一输水管,所述第一输水管的一侧设置有第一分流器,所述第一分流器的一端沿相同间隔设置有多个第二喷水管,所述水箱的底端设置有第二输水管,所述第二输水管的一侧设置有第二分流器,所述第二分流器的顶端连通设置有多个第一喷水管,多个第一喷水管的一端延伸至固定框壳体的外部,所述固定框的内壁对称设置有两个冷却池,所述冷却池的一侧设置有耐热柔性板,所述耐热柔性板的内部开设有多个出水孔,所述冷却池的一端与l型板的一端平齐。
5、优选地,所述限位组件包括顶板、伸缩杆、第二气缸、第三气缸和横板,所述固定框的顶端一侧固定连接有顶板,所述顶板的顶端两侧均设置有第二气缸,所述第二气缸的底端设置有伸缩杆,所述固定框的底端内部设置有第三气缸,所述第三气缸的输出端设置有横板,所述横板的内部设置有第一柔性层,所述横板的内部开设有凹槽,所述凹槽的两侧设置有滑槽,所述凹槽的内部设置有活动板,所述活动板的内部一侧设置有第二柔性层,所述活动板的正反两端均设置有延伸块,所述延伸块与滑槽活动连接,所述活动板的正反两侧沿相同间隔开设有多个卡接槽,两个所述伸缩杆的底端均与活动板的一端固定连接。
6、优选地,所述固定框的正反两侧均设置有多个电动推杆,所述电动推杆的直径与对应的卡接槽相匹配。
7、优选地,所述活动轴承的中部表面设置有固定环,所述固定环的表面设置有连接轴承,所述连接轴承的顶端活动连接有限位杆,所述限位杆的顶端延伸至底座的壳体内部。
8、优选地,所述第一驱动轴和第二驱动轴的规格相同,且所述第一驱动轴和第二驱动轴的两端均设置有轮胎,所述第二驱动轴的底端结构与第一驱动轴的底端结构相同。
9、优选地,所述l型板的顶端一侧设置有警报装置,所述警报装置的顶端设置有提示灯,所述警报装置的内部设置有plc处理器。
10、优选地,所述横板的顶端与固定框底部壳体的顶端相平齐。
11、优选地,所述传动带两侧的轮齿水平最远间距大于卡接齿的水平最远间距。
12、一种防火巡检机器人的使用方法,具体步骤如下:
13、步骤一:机器人在多个驱动装置相互配合的作用下对场地上的物资进行巡检工作,在发现火情出现时,温度检测器将检测到的温度进行比对,并将高温信息送入警报装置中,警报装置发出提示,并控制多个驱动装置停止运行;
14、步骤二:机器人中的热膨胀块在高温环境下膨胀进入连接管道中,连接管道中的气体被挤压至伸缩环中,伸缩环拉伸提高其中一个驱动装置和传动带的高度,该传动带不与对应的卡接齿相接触,并且同时启动第一气缸带动压板下降,带动水箱中的水资源通过第一喷水管和第二喷水管排出,机器人在三个驱动装置的作用下做圆周运动,并且在运动的同时第一喷水管和第二喷水管对火情处喷洒水资源,对隐患处也喷洒水资源;
15、步骤三:喷洒水资源完毕后,启动第三气缸带动横板前进,在第一柔性层的作用下,横板的一端朝向地面,驱动装置再控制机器人前进使受损物资运输到横板上,再启动第二气缸拉动伸缩杆使得横板抬高与固定框水平,随后启动第三气缸收回横板,再启动第二气缸收缩伸缩杆拉出活动板,在第二柔性层和伸缩杆的作用下部分活动板向上弯曲形成l型,再启动电动推杆与卡接槽相卡接,随后机器人将受损物资运走即可。
16、与现有技术相比,本发明具有如下有益效果:
17、1.本发明中,通过驱动组件的设置,由于第一驱动轴和第二驱动轴分别设置在对应的转向槽内部,第一驱动轴的中部设置有活动轴承,这样第一驱动轴被活动轴承分成两部分,且这两部分独立运动,可以形成差速转动,由于第一驱动轴和第二驱动轴的结构相同,两个驱动轴被分成四个部分,再由于驱动装置的输出端转动连接有传动带,传动带的内壁固定连接有轮齿,卡接齿与传动带内壁顶端的轮齿相啮合,多个驱动装置带动各自部分的驱动轴转动,驱动装置的底端设置有承重板,承重板的中部设置有微型电机,微型电机的输出端设置有转轴,转轴延伸至驱动装置的内部,在转弯时多个轮胎可以尽量减小转弯的半径,并且四个轮子在转弯时可以改变速度以减小转弯半径,再由于承重块的内部设置有伸缩环,底座的正面一侧设置有两个温度检测器,两个温度检测器的内部均设置有热膨胀块,热膨胀块的一端固定连接有连接管道的一端,连接管道的另一端延伸至其中一个伸缩环的内部,热膨胀块、连接管道和伸缩环形成一个密闭空间,在巡检过程中遇到火情时,热膨胀块膨胀进入连接管道中,连接管道中的气体被挤压至伸缩环中,伸缩环拉伸提高其中一个驱动装置和传动带的高度,此时只有三个驱动装置的工作正常,方便机器人做转弯半径最小的圆周运动,这样会减少磕碰的发生,保护了机器人主体和被巡检物资,提高灵活性。
18、2.本发明中,通过输水组件的设置,由于固定框、l型板和分隔板形成水箱,分隔板靠近l型板的一侧设置有限位板,限位板的高度小于分隔板的高度,在第一气缸工作时,带动压板向下移动,水箱中的部分水资源被挤压后通过第一输水管进入第一分流器再通过第二喷水管喷出,还有部分水资源通过第二输水管进入第二分流器再通过多个第一喷水管喷出,在驱动组件的配合下,机器人做圆周运动,与此同时多个第一喷水管和第二喷水管一直在喷水,水资源随着机器人主体的旋转而旋转,不光能对着火点进行处理,还可以对着火点的附近区域进行处理,杜绝了二次着火的隐患,这样在后续巡检过程中该点不会二次着火,提高了机器人的工作效率。
19、3.本发明中,通过限位组件的设置,由于第二气缸的底端设置有伸缩杆,固定框的底端内部设置有第三气缸,第三气缸的输出端设置有横板,横板的内部设置有第一柔性层,横板的内部开设有凹槽,凹槽的两侧设置有滑槽,凹槽的内部设置有活动板,活动板的内部一侧设置有第二柔性层,活动板的正反两端均设置有延伸块,延伸块与滑槽活动连接,活动板的正反两侧沿相同间隔开设有多个卡接槽,两个伸缩杆的底端均与活动板的一端固定连接,在处理着火点完毕后,热膨胀块缩回,多个驱动装置都能正常工作,调节机器人的方向朝向受损物资,启动第三气缸带动横板前进,在第一柔性层的作用下,横板的一端朝向地面,方便受损物资移动到横板上,驱动装置再控制机器人前进使受损物资运输到横板上,启动第二气缸拉动伸缩杆使得横板抬高与固定框水平,随后启动第三气缸收回横板,再启动第二气缸收缩伸缩杆拉出活动板,在第二柔性层和伸缩杆的作用下部分活动板向上弯曲形成l型,再启动电动推杆与卡接槽相卡接,随后机器人将受损物资运走即可,这样对受损物资进行处理,不需要工作人员过来视察,提高了对物资的处理效率。
20、4.本发明中,通过冷却池的设置,固定框的内壁对称设置有两个冷却池,冷却池的一侧设置有耐热柔性板,耐热柔性板的内部开设有多个出水孔,冷却池的一端与l型板的一端平齐,当第二喷水管喷水时,部分水资源流入冷却池中,会使得耐热柔性板产生形变,出水孔的直径较小,当受损物资被运输至横板上后,冷却池中的水资源还可以对他进行二次降温,提高了机器人的安全性能。
- 还没有人留言评论。精彩留言会获得点赞!