一种天地盒输送定位系统的制作方法
1.本实用新型涉及一种天地盒输送定位系统,属于包装技术领域。
背景技术:
2.天地盒指的是一种盒子的样式,纸盒的盖为“天”,底为“地”,故称天地盒。天地盒又称天地盖,被广泛应用于各类精装礼品包装盒、鞋盒、内衣盒、衬衫盒、手机盒等各类包装盒。
3.随着人们环保意识的增强,全球纸盒/纸箱包装工业发展迅速,生产能力大幅度增加。由于折叠纸盒具有加工成本低、储运方便,适用于各种印刷方法(平印/胶印、凹印、凸印/柔印、丝网印刷)、易于成型加工(模切压痕、折叠粘合)、适合于自动包装(自动完成打开—成形一装封口等工序)、便于销售、陈列和回收,有利于环境保护等特点,特别是通过表面整饰(上光、覆膜、烫印、压凹凸) 后,有利于商品的宣传和推销、提高产品的附加值,被广泛地应用于烟酒、药品、食品、饮料、日用百货、工艺品的包装。
4.天地盒在加工过程中,为使外表面更为精美,会在天地盒外表面固定一层外包装(包装纸或包装布等),为此就需要视同天地盒定位系统,现有的天地合定位系统是先对外包装四角进行剪角(为了进行摄像头定位),通过输送皮带将剪角后的外包装输送至工业定位摄像头的正下方,摄像头根据外包装的四角对外包装定位,再根据定位信息控制机械手将天地盒的盒体移动到外包装的正上方将盒体与外包装粘合固定,目前这种方式都是定位外包装的背面,由于外包装上的印刷一般与外包装结构存在一定误差,而背面定位方式是以外包装结构进行定位的,即外包装结构与盒体之间还会存在一定误差,从而使外包装上的印刷与最终的盒体之间存在两道误差,这就导致即便外包装上的印刷、外包装结构与盒体之间的定位误差均符合国标规定,但仍存在极大概率会生产出外包装上的印刷与最终的盒体位置偏差过大的废品,这是目前大量印刷企业都面临的一大难题。
技术实现要素:
5.本实用新型提供一种天地盒输送定位系统,以解决现有天地盒定位系统不合理,不仅需要对外包装结构的四角进行剪角操作,且存在较大概率会生产出外包装印刷与盒体位置偏差过大的废品的问题。
6.为达到上述目的,拟采用这样一种天地盒输送定位系统,包括定位摄像头和传送带组,外包装平放于传送带组上,传送带组包括第一传送带、第二传送带和第三传送带,三个传送带的输送面相平齐,且第二传送带和第三传送带并排对接设置于第一传送带的上游或下游处,第二传送带与第三传送带和第一传送带之间均预留有定位缝,外包装的两个对角分别对应设置于两个定位缝处,两个定位摄像头分别对应设置于所述外包装的两个对角的下方,两个定位摄像头通过分别采集外包装正面两个对角处的图像信息以对外包装进行定位。
7.前述定位系统中,还包括有处理器和机械手,所述定位摄像头和机械手均与处理
器相连。
8.前述定位系统中,还包括有用于喷涂十字线的数码喷头,数码喷头固定于机械手上,用于对外包装背面的四角处进行十字线喷涂,数码喷头也与处理器相连。
9.与现有技术相比,本实用新型通过传送带下方对外包装的正面图案进行采集信息并定位,即定位信息依据外包装的正面图案,而并非像现有方法定位是依据外包装背面四角处的剪角,进行盒体粘合固定时更为精准,避开了一道定位误差,极大降低了废品率,大幅提升了产品质量和合格率,同时,该定位系统和方法无需对外包装进行前期剪角,省去了一个加工环节,提升加工效率,并降低生产成本,具有极高推广应用价值,市场前景极好。
附图说明
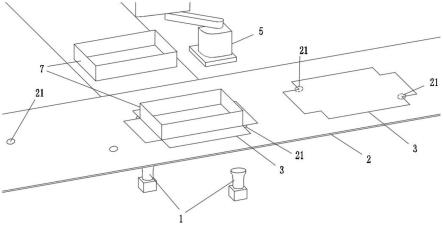
10.图1为本实用新型的结构示意图(外包装与盒体粘合状态下);
11.图2是图1中外包装输送至定位缝前的结构示意图;
12.图3是使用数码喷头时本实用新型的结构示意图;
13.图4是本实用新型的控制原理图;
14.图5是使用数码喷头时本实用新型的控制原理图。
具体实施方式
15.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作进一步的详细说明,应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
16.实施例1
17.参照图1、图2和图4,本实施例提供一种天地盒输送定位系统,包括定位摄像头1和传送带组2,外包装3平放于传送带组2上,传送带组2包括第一传送带21、第二传送带22和第三传送带23,三个传送带的输送面相平齐,且第二传送带22和第三传送带23并排对接设置于第一传送带21的上游或下游处,第二传送带22与第三传送带23和第一传送带21之间均预留有定位缝4,外包装3 的两个对角分别对应设置于两个定位缝4处,两个定位摄像头1分别对应设置于所述外包装3的两个对角的下方,两个定位摄像头1通过分别采集外包装3正面两个对角处的图像信息以对外包装3进行定位。
18.定位摄像头1和机械手6均与处理器5相连,定位摄像头1采集的图像信息传输至处理器5进行处理分析,以实现对外包装3正面的定位,再通过处理器5 根据定位信息控制机械手6将已粘胶的盒体8转移至外包装3的背面并将盒体8 与外包装3背面粘合固定。
19.还包括有用于喷涂十字线的数码喷头7,数码喷头7固定于机械手6上,用于对外包装3背面的四角处进行十字线喷涂,数码喷头7也与处理器5相连。定位摄像头1采集的图像信息传输至处理器5进行处理分析,以实现对外包装3 正面的定位,再通过处理器5根据定位信息控制数码喷头6对外包装3背面的至少两个对角进行十字线喷涂
20.具体方法如下:外包装3正面朝下铺设于传送带组2上并通过传送带组2 输送至三个传送带的交界处,外包装3的两个对角分别对应设置于两个定位摄像头1上方的定位缝4处,定位摄像头1透过定位缝4对外包装3两个对角处的正面图像信息进行采集并将采集的信息输送至处理器5进行处理分析,从而对外包装3正面图案进行定位,再通过处理器5根据
定位信息控制机械手6将已上胶的盒体8转移至传送带2上方的外包装3的背面粘合。
21.实施例2
22.参照图3和图5,本实施例提供一种天地盒输送定位系统,包括定位摄像头 1和传送带组2,外包装3平放于传送带组2上,传送带组2包括第一传送带21、第二传送带22和第三传送带23,三个传送带的输送面相平齐,且第二传送带22 和第三传送带23并排对接设置于第一传送带21的上游或下游处,第二传送带 22与第三传送带23和第一传送带21之间均预留有定位缝4,外包装3的两个对角分别对应设置于两个定位缝4处,两个定位摄像头1分别对应设置于所述外包装3的两个对角的下方,两个定位摄像头1通过分别采集外包装3正面两个对角处的图像信息以对外包装3进行定位。
23.定位摄像头1、机械手6和数码喷头7均与处理器5相连,数码喷头7固定于机械手6上,机械手6设置于传送带组2的上方,定位摄像头1采集的图像信息传输至处理器5进行处理分析,以实现对外包装3正面的定位,再通过处理器 5根据定位信息控制数码喷头6对外包装3背面的至少两个对角进行十字线喷涂。
24.具体方法如下:外包装3正面朝下铺设于传送带组2上并通过传送带组2 输送至三个传送带的交界处,外包装3的两个对角分别对应设置于两个定位摄像头1上方的定位缝4处,定位摄像头1透过定位缝4对外包装3两个对角处的正面图像信息进行采集并将采集的信息输送至处理器5进行处理分析,从而对外包装3正面图案进行定位,再通过处理器5根据定位信息控制机械手6将固定于机械手6上的数码喷头7转移至外包装3的四角处,对外包装3背面的四角进行十字线喷涂,以便于后续盒体8与外包装3固定时的定位。
25.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1