用于从制浆工艺中去除固体碎屑的绞绳机系统和方法与流程
本说明书总体上涉及用于生产造纸用纸浆的系统和方法,具体地涉及用于在制浆工艺期间从纸浆浆料中去除固体碎屑的系统和方法。
背景技术:
1、在造纸行业中,用于造纸的工艺包括纸浆浆料的生产,该纸浆浆料是在水中的诸如纤维素纤维或其他植物基纤维之类的固体纤维的浆料。回收纸可用作固体纤维的来源。通常通过将回收纸的捆包添加到制浆机中以将回收纸添加到制浆工艺中。纸张回收工艺可能主要依赖作为造纸工艺的原料的回收纸产品。回收纸的捆包可能包括金属或塑料的带以及其他固体碎屑,这些碎屑可能污损制浆和回收设备。
技术实现思路
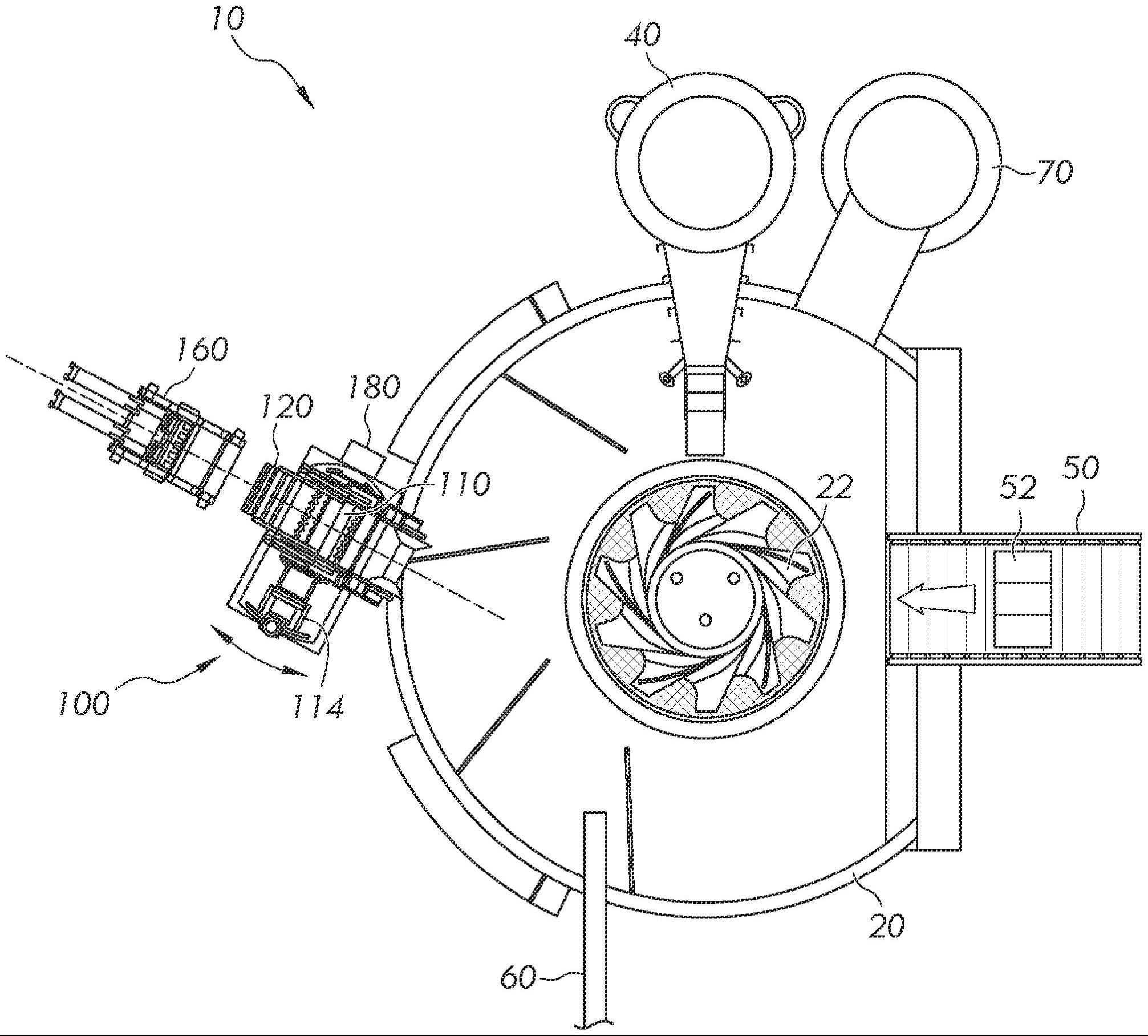
1、这些金属线和带、塑料和其他杂物可以使用绞绳机(ragger)去除。绞绳机初始地使用浸入纸浆浆料中的绳索来缠结金属线和带、塑料和其他碎屑,这些碎屑附连至绳索并作为尾部慢慢地从制浆机中拉出。当绳索的端部到达绞绳机时,尾部变得自动形成,并且绞绳机继续将尾部从制浆容器中拉出。尽管绞绳机是一项非常成熟的产品技术,但绞绳机仍然非常简单,并且并未设计成适应当今纸回收厂的操作状况的正常变化。由于无法适应制浆机的变化的操作状况,绞绳机经常无法正常操作,并且需要大量人力来清理、清洁和重新投入使用。当绞绳机停机时,制浆工艺通常中断并关闭。
2、因此,不断需要绞绳机系统和操作绞绳机的方法,能够使得绞绳机调节以适应于制浆操作的变化的操作状况。本公开的绞绳机系统和操作绞绳机系统的方法能够实现绞绳机的诸如尾部的抽出速率、牵拉机驱动器的方向、骑乘辊(rider roll)压力、骑乘辊的扭矩或速度等的操作参数响应于尾部的属性的变化或制浆操作的操作状况的变化来调节,以防止尾部断裂并且维持绞绳机的连续操作。本公开的绞绳机系统包括绞绳机,该绞绳机具有被驱动的牵拉机机构和联接于压力装置的骑乘辊,该压力装置可操作成致使骑乘辊沿朝向牵拉机机构的方向上并且抵靠设置在骑乘辊和牵拉机机构之间的尾部来施加压力。本公开的系统可包括操作地联接于骑乘辊以驱动骑乘辊的驱动马达和操作地联接于牵拉机机构的变速驱动器(vsd)的牵拉机驱动器。骑乘辊上的驱动马达和操作地联接于牵拉机机构的vsd可用于减少由绞绳机从制浆机容器牵拉出的尾部的打滑,并且响应于尾部的属性或制浆系统的操作状况来控制绞绳机的操作。
3、此外,本公开的绞绳机系统包括一个或多个测量装置和控制系统,该控制系统包括至少一个处理器、至少一个存储器模块以及计算机可读和可执行指令。测量装置可包括一个或多个扭矩传感器、振动传感器、光学传感器、相机、重量载荷传感器、位置传感器、压力传感器、电容传感器、电流表、马达速度传感器、液位传感器、流量计、输送机速度传感器、温度传感器、其他测量装置或这些装置的组合,如本文进一步描述的。测量装置可对控制系统提供电子信号,该电子信号可指示尾部的尺寸、厚度、长度或密度、尾部相对于牵拉机机构或骑乘辊的打滑、断裂的尾部、尾部的金属含量、制浆机的生产速率、引入制浆机的回收纸料与引入制浆机的原始纤维的比率、制浆机中的液位、纸浆浆料的稠度和/或温度、制浆机或绞绳机的其他操作状况或这些的组合。控制系统可操作成接收来自测量装置的一个或多个输入变量,并且调节绞绳机从制浆机抽出尾部的牵拉速率、牵拉机驱动器的方向、骑乘辊在尾部上的压力、骑乘辊上的扭矩、骑乘辊的速度、绞绳机相对于制浆机容器的旋转位置、绞绳机的其他操作参数或这些的组合。控制系统对绞绳机操作参数的这些调节可允许绞绳机系统考虑尾部属性的变化和/或制浆过程的操作状况的变化(例如,条带和碎屑的量或生产速率的增加或减少),以减少或防止尾部生长得太大并堵塞绞绳机或者尾部变得太细的发生,这可能导致尾部断裂并且落回到制浆机容器中。与现有的绞绳机机器相比,减少绞绳机堵塞和/或尾部断裂可以改善绞绳机系统的正常运行时间和制浆工艺的效率。
4、根据本公开的一个或多个方面,用于从制浆系统的制浆机容器去除固体碎屑的绞绳机系统可包括可操作成从制浆机容器牵拉碎屑的尾部的绞绳机。绞绳机包括牵拉机机构,该牵拉机机构包括操作地联接于牵拉机机构的牵拉机驱动器和与牵拉机机构间隔开的骑乘辊。绞绳机还包括压力装置,该压力装置构造成调节设置在主辊和骑乘辊之间的尾部上的骑乘辊的压力。绞绳机系统包括至少一个测量装置,该测量装置可操作成测量指示尾部的一种或多种属性、制浆系统的一种或多种操作状况或这些的组合的一种或多种输入变量。绞绳机系统还可以包括控制系统,该控制系统包括处理器、通信地联接于处理器的存储器模块、以及存储在存储器模块上的机器可读且可执行的指令。控制系统可以通信地联接于至少一个测量装置。控制系统还可通信地联接于牵拉机驱动器、压力装置、操作地联接于骑乘辊的骑乘辊驱动器或这些的组合。当由处理器执行时,机器可读且可执行的指令可以导致绞绳机系统利用至少一个测量装置自动测量一种或多种输入变量,其中,所述一种或多种输入变量指示尾部的一种或多种属性、绞绳机的一种或多种操作状况、制浆系统的一种或多种操作状况或这些的组合;以及基于测量到的输入变量调节尾部的抽出速率、牵拉机驱动器的方向、压力装置的压力、骑乘辊上的扭矩、骑乘辊的速度或这些的组合。
5、可以理解,前文的
技术实现要素:
和下文的具体实施方式都描述了各种实施例,并且旨在提供用于理解所要求保护的主题的性质和特征的概述或框架。
技术特征:
1.一种用于从制浆系统的制浆机容器去除固体碎屑的绞绳机系统,所述绞绳机系统包括:
2.如权利要求1所述的系统,其特征在于:
3.如权利要求1或2中任一项所述的系统,其特征在于,所述至少一个测量装置包括扭矩测量装置,所述扭矩测量装置联接于所述牵拉机机构、联接于所述牵拉机驱动器或者联接于将所述牵拉机驱动器联接至所述牵拉机机构的传动系,并且当由所述处理器执行时,所述机器可读且可执行的指令使所述绞绳机系统自动地:
4.如权利要求1-3中任一项所述的系统,其特征在于,还包括操作地联接于所述骑乘辊的骑乘辊驱动器,其中,当由所述处理器执行时,所述计算机可读且可执行的指令使所述绞绳机系统自动地基于测量的所述一个或多个输入变量来调节所述骑乘辊上的扭矩、所述骑乘辊的速度或两者。
5.如权利要求1-4中任一项所述的系统,其特征在于:
6.如权利要求1-5中任一项所述的系统,其特征在于:
7.如权利要求1-6中任一项所述的系统,其特征在于,所述一个或多个测量装置包括能操作成确定所述骑乘辊相对于所述牵拉机机构的位置的位置传感器。
8.如权利要求7所述的系统,其特征在于,当由所述处理器执行时,所述机器可读且可执行的指令使所述绞绳机系统自动地:
9.如权利要求8所述的系统,其特征在于,当由所述处理器执行时,所述机器可读且可执行的指令使所述绞绳机系统自动地:
10.如权利要求7-9中任一项所述的系统,其特征在于,当由所述处理器执行时,所述机器可读且可执行的指令使所述绞绳机系统自动地:
11.如权利要求10所述的系统,其特征在于,当由所述处理器执行时,所述机器可读且可执行的指令使所述绞绳机系统自动地:
12.如权利要求1-11中任一项所述的系统,其特征在于,所述一个或多个测量装置包括定位在所述制浆机容器内或者定位在所述制浆机容器、所述绞绳机或两者上方的一个或多个相机。
13.如权利要求12所述的系统,其特征在于,当由所述处理器执行时,所述机器可读且可执行的指令使所述绞绳机系统自动地:
14.如权利要求12或13中的任一项所述的系统,其特征在于:
15.如权利要求14所述的系统,其特征在于,当由所述处理器执行时,所述机器可读且可执行的指令使所述绞绳机系统自动地:
16.如权利要求14或15中任一项所述的系统,其特征在于,当由所述处理器执行时,所述机器可读且可执行的指令使所述绞绳机系统自动地:
17.如权利要求16所述的系统,其特征在于,当由所述处理器执行时,所述机器可读且可执行的指令使所述绞绳机系统自动地:
18.如权利要求14-17中任一项所述的系统,其特征在于,当由所述处理器执行时,所述机器可读且可执行的指令使所述绞绳机系统自动地:
19.如权利要求14-18中任一项所述的系统,其特征在于,当由所述处理器执行时,所述机器可读且可执行的指令使所述绞绳机系统自动地:
20.如权利要求19所述的系统,其特征在于,当由所述处理器执行时,所述机器可读且可执行的指令使所述绞绳机系统自动地:
21.如权利要求20所述的系统,其特征在于,当由所述处理器执行时,所述机器可读且可执行的指令使所述绞绳机系统自动地:
22.如权利要求1-21中任一项所述的系统,其特征在于:
23.一种用于从制浆系统的制浆机容器去除固体碎屑的绞绳机系统,所述绞绳机系统包括:
技术总结
公开了一种用于从制浆系统的制浆机容器去除固体碎屑的绞绳机系统。绞绳机系统包括可操作成从制浆机容器牵拉固体碎屑的尾部的绞绳机。绞绳机包括牵拉机机构、牵拉机驱动器、骑乘辊和压力装置,该压力装置用于调节牵拉机机构和骑乘辊之间的尾部上的骑乘辊的压力。绞绳机系统包括用于确定尾部的属性、制浆系统或绞绳机的操作状况或这些的组合的测量装置。绞绳机系统包括控制系统,该控制系统利用测量装置来测量输入变量,根据输入变量确定尾部的属性或操作状况,并且调节抽出速率、牵拉方向、压力、骑乘辊滚动扭矩或速度或这些的组合,以维持绞绳机操作的连续性。
技术研发人员:C·德姆勒,D·帕伦特奥,P·麦克恩罗,M·罗帕内,G·S·威廉姆森
受保护的技术使用者:凯登百利可乐生有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!