一种具有充电防护结构的教学机器人的制作方法
1.本实用新型涉及人工智能技术领域,尤其涉及一种具有充电防护结构的教学机器人。
背景技术:
2.随着人工智能技术、计算机技术等相关技术的发展,对智能机器人的研究越来越多,在教育领域,许多院校已在学生中开设了机器人学方面的有关课程。
3.但是现有技术中,现有的教学机器人,在使用的时候,可以在增加课堂趣味同时减少老师的工作量,但是有些教学机器人在拥挤的教室内部充电极其不便,特别是在年龄层次比较小的班级内部,小朋友在玩耍的时候,很容易碰到充电连接线,从而发生危险。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,有些教学机器人在拥挤的教室内部充电极其不便,特别是在年龄层次比较小的班级内部,小朋友在玩耍的时候,很容易碰到充电连接线,从而发生危险。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种具有充电防护结构的教学机器人,包括机器人主体,所述机器人主体的底部活动安装有移动轮,所述移动轮的底部活动卡接有底座,所述底座的顶部设置有充电机构,所述充电机构包括充电板,所述充电板的内部连接有导线,所述导线的输出端电性连接有插头,所述充电板的外表面固定安装有细杆,所述细杆的外表面活动套设有锥形头,所述锥形头的正表面与充电板的后表面之间连接有弹簧,所述插头的底部安装有承接板。
6.作为一种优选的实施方式,所述承接板的正表面安装有电动伸缩杆,所述电动伸缩杆的正表面与充电板的后表面相适配,所述充电板的正表面安装有散热铝片。
7.采用上述进一步方案的有益效果是:电动伸缩杆在启动的时候,可以进行伸缩。
8.作为一种优选的实施方式,所述机器人主体的正表面安装有连接头,所述连接头的内部与插头的外表面相适配。
9.采用上述进一步方案的有益效果是:插头可以插入连接头的内部。
10.作为一种优选的实施方式,所述机器人主体的正表面开设有校准圆孔,所述校准圆孔的内表面与锥形头的外表面相适配。
11.采用上述进一步方案的有益效果是:锥形头可以插入到校准圆孔的内部。
12.作为一种优选的实施方式,所述底座的顶部安装有支撑杆,所述支撑杆的顶部安装有挡板。
13.采用上述进一步方案的有益效果是:支撑杆与挡板可以将机器人主体限位。
14.作为一种优选的实施方式,所述底座的底部安装有防滑垫。
15.采用上述进一步方案的有益效果是:防滑垫可以防止底座在有水的地面发生滑动。
16.与现有技术相比,本实用新型的优点和积极效果在于,
17.1、本实用新型中,移动轮在移动到底座顶部的时候,可以刚好与底座顶部的凹槽相卡合,防止机器人主体偏离插头处,当机器人主体完全移动至底座的顶部的时候,可以将充电机构与连接头进行连接,便于对机器人主体进行充电,在校准之后,将电动伸缩杆启动,使得电动伸缩杆向前移动,带着插头移动至连接头的内部,完成对机器人主体充电。
18.2、本实用新型中,机器人主体上的移动轮在凹槽内部的时候,校准圆孔的内部将对准锥形头的内部,这时锥形头将安插在校准圆孔的内部,进一步的对插头和连接头进行校准,底座顶部安装的支撑杆可以将挡板进行支撑,可以将小朋友挡在外面,减少小朋友触碰到充电时机器人的可能性。
附图说明
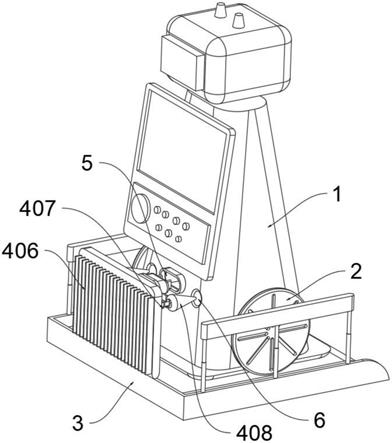
19.图1为本实用新型提出一种具有充电防护结构的教学机器人的主视立体结构示意图;
20.图2为本实用新型提出一种具有充电防护结构的教学机器人的移动轮立体结构示意图;
21.图3为本实用新型提出一种具有充电防护结构的教学机器人的充电机构立体结构示意图;
22.图4为本实用新型提出一种具有充电防护结构的教学机器人的底座立体结构示意图。
23.图例说明:
24.1、机器人主体;2、移动轮;3、底座;4、充电机构;5、连接头;6、校准圆孔;7、支撑杆;8、挡板;9、防滑垫;
25.401、充电板;402、导线;403、插头;404、电动伸缩杆;405、承接板;406、散热铝片;407、细杆;408、锥形头。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.实施例1
28.如图1-4所示,本实用新型提供一种技术方案:一种具有充电防护结构的教学机器人,包括机器人主体1,机器人主体1的底部活动安装有移动轮2,移动轮2的底部活动卡接有底座3,底座3的顶部设置有充电机构4,充电机构4包括充电板401,充电板401的内部连接有导线402,导线402的输出端电性连接有插头403,充电板401的外表面固定安装有细杆407,细杆407的外表面活动套设有锥形头408,锥形头408的正表面与充电板401的后表面之间连接有弹簧,插头403的底部安装有承接板405,承接板405的正表面安装有电动伸缩杆404,电动伸缩杆404的正表面与充电板401的后表面相适配,充电板401的正表面安装有散热铝片406。
29.在本实施例中,机器人主体1的底部安装的移动轮2可以将机器人主体1进行移动,移动轮2在移动到底座3顶部的时候,可以刚好与底座3顶部的凹槽相卡合,放置机器人主体1偏离插头403处,当机器人主体1完全移动至底座3的顶部的时候,可以将充电机构4与连接头5进行连接,在机器人主体1位置校准的时候,便于对机器人主体1进行充电,在校准之后,将电动伸缩杆404启动,使得电动伸缩杆404向前移动,带着插头403移动至连接头5的内部,充电板401的外表面安装的散热铝片406可以起到为充电板401散热的作用。
30.实施例2
31.如图1-4所示,机器人主体1的正表面安装有连接头5,连接头5的内部与插头403的外表面相适配,机器人主体1的正表面开设有校准圆孔6,校准圆孔6的内表面与锥形头408的外表面相适配,底座3的顶部安装有支撑杆7,支撑杆7的顶部安装有挡板8,底座3的底部安装有防滑垫9。
32.在本实施例中,机器人主体1上的移动轮2在凹槽内部的时候,校准圆孔6的内部将对准锥形头408的内部,这时锥形头408将安插在校准圆孔6的内部,进一步的对插头403和连接头5进行校准,底座3顶部安装的支撑杆7可以将挡板8进行支撑,可以将小朋友挡在外面,减少小朋友触碰到充电时机器人的可能性,底座3的底部安装的防滑垫9可以起到防滑的作用,在教室内部存在积水的时候,可以稳定底座3。
33.工作原理:
34.如图1-4所示,在使用的时候,机器人主体1的底部安装的移动轮2可以将机器人主体1进行移动,移动轮2在移动到底座3顶部的时候,可以刚好与底座3顶部的凹槽相卡合,防止机器人主体1偏离插头403处,当机器人主体1完全移动至底座3的顶部的时候,可以将充电机构4与连接头5进行连接,在机器人主体1位置校准的时候,便于对机器人主体1进行充电,在校准之后,将电动伸缩杆404启动,使得电动伸缩杆404向前移动,带着插头403移动至连接头5的内部,充电板401的外表面安装的散热铝片406可以起到为充电板401散热的作用,机器人主体1上的移动轮2在凹槽内部的时候,校准圆孔6的内部将对准锥形头408的内部,这时锥形头408将安插在校准圆孔6的内部,进一步的对插头403和连接头5进行校准,底座3顶部安装的支撑杆7可以将挡板8进行支撑,可以将小朋友挡在外面,减少小朋友触碰到充电时机器人的可能性,底座3的底部安装的防滑垫9可以起到防滑的作用,在教室内部存在积水的时候,可以稳定底座3。
35.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1