基于可穿戴设备的外浮顶油罐事故处置训练系统的制作方法
基于可穿戴设备的外浮顶油罐事故处置训练系统
1.本技术要求在先申请号为2021219773632,名称为“基于vr的外浮顶油罐事故处置教学和训练系统”的优先权,并包含该优先权文件的全部内容。
技术领域
2.本实用新型涉及计算机技术领域,具体而言,涉及一种基于可穿戴设备的外浮顶油罐事故处置训练系统。
背景技术:
3.浮顶油罐是大型储备库最重要的设备,随着油库扩容的要求,多年来国内外的浮顶卡阻沉顶事故多次发生,造成巨大经济损失,成为急待解决的课题。随着国民经济稳中求进,国内石油化工、煤化工、精细化工等化工行业蓬勃发展,带动了化工原材料对存储需求的增加。大量装载危险化学品的油罐出现在祖国的大江南北。由于油罐救火的难度大,条件困难,危害性大的原因,这给应急部门尤其是消防救援部门带来了巨大的风险和救援压力。其中外浮顶油罐(例如用于存储原油),发生事故几率也较高。外浮顶油罐消防培训演练是为了增强安全防火意识,让大家进一步了解掌握火灾的处理流程,以及提升在处理突发事件过程中的协调配合能力,增强消防人员在火灾中处置事故的能力。
4.现有外浮顶油罐消防培训演练方法包括实物训练方式和视频教学训练方式,实物训练方式采用实罐或模型罐方式实地训练,存在场地限制、训练成本高、环境污染、无法重现、多次重复训练难度大等缺点。视频教学训练方式通过视频方式呈现外浮顶油罐事故处理步骤及注意事项,存在不够直观,不能亲自操作等缺点。
技术实现要素:
5.针对上述现有技术中存在的问题至少之一,本实用新型公开了一种基于可穿戴设备的外浮顶油罐事故处置训练系统,该系统可以使得操作人员获得更好的训练体验,提升训练效果。
6.本技术提供一种基于可穿戴设备的外浮顶油罐事故处置训练系统,包括:
7.立体空间,所述立体空间包括侧面和顶面;
8.外浮顶油罐模型,位于所述立体空间;
9.可穿戴设备,用于呈现虚拟影像,所述虚拟影像包括所述外浮顶油罐模型影像;
10.位置监测器,设置于所述立体空间的侧面和/或顶面上,与所述可穿戴设备通讯连接,用于定位所述可穿戴设备在所述立体空间中的位置,生成定位信号;
11.动作捕捉装置,用于捕捉操作人员的手部动作并生成手部动作信号;以及
12.中央控制器,与所述可穿戴设备、位置监测器以及动作捕捉装置通讯连接,用以接收所述手部动作信号和定位信号,根据所述手部动作信号和定位信号生成控制信号,并将所述控制信号发送至所述可穿戴设备。
13.在一些实施例中,所述外浮顶油罐模型包括储罐壳,所述储罐壳包括外浮顶结构。
14.在一些实施例中,所述外浮顶油罐模型包括设置于所述外浮顶结构上的边缘通气阀、边缘密封条以及应急雨水溢流管。
15.在一些实施例中,所述外浮顶油罐模型包括设置于所述外浮顶结构上的浮球式液位计。
16.在一些实施例中,所述的基于可穿戴设备的外浮顶油罐事故处置训练系统,其特征在于:所述位置监测器包括多个,所述多个位置监测器间隔分布在设置于所述立体空间的侧面和/或顶面。
17.在一些实施例中,设置有所述位置监测器的所述侧面和/或顶面呈弧面,所述弧面远离所述外浮顶油罐模型弯曲。
18.在一些实施例中,所述可穿戴设备包括头盔式显示器或双目全方位显示器。
19.在一些实施例中,所述位置监测器包括激光雷达、红外摄像头或体感摄像头中一种或多种。
20.在一些实施例中,所述动作捕捉装置包括动作捕捉手套、动作捕捉手环和/或动作捕捉手柄。
21.本技术实施例的上述方案与相关技术相比,至少具有以下有益效果:
22.该系统通过实物外浮顶油罐模型与虚拟外浮顶油罐模型影像相结合,并结合位置监测器和/或动作捕捉装置,通过中央控制器通讯连接,实现模拟真实场景下事故处置的模拟训练。
附图说明
23.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
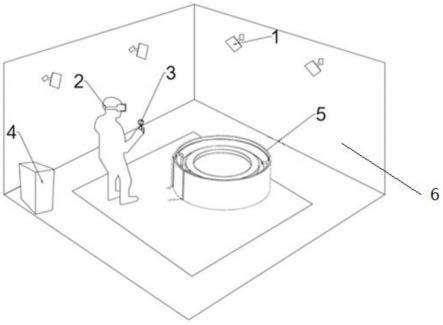
24.图1是根据本实用新型的实施例的基于可穿戴设备的外浮顶油罐事故处置训练系统的结构示意图;以及
25.图2是根据本实用新型的实施例的外浮顶油罐模型结构图。
26.附图中附图标记的具体含义:
27.1-位置监测器、2-可穿戴设备、3-动作捕捉装置、4-中央控制器、5-外浮顶油罐模型、6-工作空间。
具体实施方式
28.为了使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作进一步地详细描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
29.还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的商品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种商品或者装置所固有的要素。在没有更多限制的情
况下,由语句“包括一个”限定的要素,并不排除在包括所述要素的商品或者装置中还存在另外的相同要素。
30.本技术提供一种基于可穿戴设备的外浮顶油罐事故处置训练系统,包括:立体空间,所述立体空间包括侧面和顶面;外浮顶油罐模型,位于所述立体空间;可穿戴设备,用于呈现虚拟影像,所述虚拟影像包括所述外浮顶油罐模型影像;位置监测器,设置于所述立体空间的侧面和/或顶面上,与所述可穿戴设备通讯连接,用于定位所述可穿戴设备在空间中的位置,生成定位信号;动作捕捉装置,用于捕捉操作人员的手部动作并生成手部动作信号;以及中央控制器,与所述可穿戴设备、位置监测器以及动作捕捉装置通讯连接,用以接收所述手部动作信号和定位信号,根据所述手部动作信号和定位信号生成控制信号,并将所述控制信号发送至所述可穿戴设备。该系统搭建出外浮顶油罐出现灾害的模拟场景,并通过可穿戴设备进行外浮顶油罐灾害场景的可视化呈现,操作人员通过操作立体空间内的外浮顶油罐模型,并将操作动作传输到可穿戴设备,从而模拟出现场处置灾害的效果,从而实现对待培训人员的模拟培训。
31.图1是根据本实用新型的实施例的一种基于可穿戴设备的外浮顶油罐事故处置训练系统的结构示意图。如图1所示,可穿戴设备的外浮顶油罐事故处置训练系统包括:位置监测器1,可穿戴设备2,动作捕捉装置3,中央控制器4,外浮顶油罐模型5以及立体空间6。
32.立体空间6作为基于可穿戴设备的外浮顶油罐事故处置训练的操作空间,来实施基于可穿戴设备的外浮顶油罐事故处置训练。立体空间6可以是封闭的,也可以是不封闭的,立体空间6包括侧面和顶面。
33.可穿戴设备2,用于呈现虚拟影像,所述虚拟影像包括所述外浮顶油罐模型5的影像。外浮顶油罐模型5呈现在立体空间6靠近中心的位置。可穿戴设备2例如包括vr头盔式显示器、双目全方位显示器或其他显示器,通过现有的3d渲染技术可以逼真的把外浮顶油罐模型5的影像显示在眼前,从而实现虚拟现实功能。所述可穿戴设备2具体的型号不做具体介绍,任何能够进行虚拟显示的可穿戴设备2都可以应用于本技术。
34.如图1和2所示,外浮顶油罐模型5呈现在立体空间6靠近中心的位置,外浮顶油罐模型可以按照大致10:1的比例制作实物模型,外浮顶油罐模型包括圆柱形的储罐壳11,储罐壳11可以为直径1米,高1-1.5米,所述储罐壳包括大致为平面的外浮顶结构,外浮顶结构位于储罐壳11顶部向下0.3米左右,外浮顶结构上设置有边缘通气阀12、边缘密封条13、呼吸装置14、浮顶支撑脚15、应急雨水溢流管16、开口17、人孔18、取样口19、浮顶防旋立柱20、温度计以及浮球式液位计21等,其中,可以采用现有的任何3d渲染技术,通过3d渲染技术将外浮顶油罐模型5进行3d模拟渲染,并同步显示于可穿戴设备2,例如预先模拟出外浮顶油罐模型的3d影像并进行显示等,对此不做介绍,可参考现有技术。可以预见的,本领域技术人员可以通过现有的3d渲染技术渲染出任何需要训练的目标进行训练,不限于外浮顶油罐模型5,例如可以是毒气泄漏装置、炸药存放装置等。
35.位置监测器1设置于所述立体空间6的侧面和/或顶面上,与所述可穿戴设备2通讯连接,例如无线或有线连接,用于定位所述可穿戴设备2在空间中的位置,即穿戴有可穿戴设备2的操作人员的位置,生成定位信号。位置监测器1采用激光雷达、双目摄像头、红外摄像头或体感摄像头中一种或多种,位置监测器是实现现实空间定位到虚拟现实空间映射的基础,例如可以预先标定位置坐标,从而对操作人员的位置进行定位,根据空间大小部署位
置监测器的数量,以实现对操作人员,例如训练人员,精准定位。其中激光雷达、红外摄像头或体感摄像头可以采用任何一种型号应用于本技术,对具体的型号不做介绍。
36.在一些实施例中,立体空间6包括侧面和/或顶面呈弧面,并且朝向远离所述外浮顶油罐模型5弯曲,使得操作人员具有更广的操作活动空间。
37.在另外的一些实施例中,立体空间6可以为球形空间,作为基于vr可穿戴设备2的外浮顶油罐事故处置训练的操作空间,来实施基于vr可穿戴设备2的外浮顶油罐事故处置训练。球形空间可以为半球形空间,或者是任意已知参数的球冠结构,例如,当为半球形空间时,半球形空间的半径(例如3米)已知后,就可以确定位于其大致中心(例如球形)的位置参数,即当操作人员和外浮顶油罐模型大致位于半球形空间的中心时,就可以确定其位置。相对于其他形状的立体空间6,可以更容易确定操作人员和外浮顶油罐模型的位置,甚至可以省略位置确定装置,以减少了数据传输量,提升训练的实时效果;当然,结合位置确定装置,可以更加准确的确定操作人员和外浮顶油罐模型的位置,提升了训练的准确性。
38.在一些实施例中,位置监测器1的数量为多个,所述多个位置监测器1间隔分布,如图1所示,多个位置监测器1例如设置立体空间6的侧面上。
39.在一些实施例中,多个位置监测器1沿所述弧形表面均匀设置,该结构可保障传感器探测死角较少或基本无死角,使受教人员可在工作空间的最大范围内进行模拟训练。
40.动作捕捉装置3用于捕捉操作人员的手部动作并生成手部动作信号。手部动作信号对应操作人员的具体操作,可以体现出操作人员在应对外浮顶油罐事故的各种具体操作。所述动作捕捉装置3包括有动作捕捉手套、动作捕捉手环或动作捕捉手柄。动作捕捉手柄类似于游戏手柄或摇杆之类的采集设备,通过动作捕捉手柄可以获取训练人员的手部动作,例如左、右、前、后、确定等。具体的,动作捕捉装置3例如为vr手柄,vr手柄用于与虚拟现实世界中的对象互动,内置有可被定位器追踪的感应器;定位器内置有激光发生器和光敏传感器,用来确定vr手柄的位置。对于动作捕捉装置具体的型号、结构不做限定,能够具有上述功能的所有动作捕捉装置都能满足本技术的需要。动作捕捉装置将训练人员的手部动作(例如对外浮顶油罐模型5的操作动作)生成对应的手部动作信号,将其传输至中央控制器4,例如模拟打开应急雨水溢流管的动作,并对外浮顶油罐模型5的应急雨水溢流管16执行打开操作,中央控制器4获取该动作信号并将相应的动作信号传输至可穿戴设备2,同步显示对外浮顶油罐模型影像的操作,以实现训练的目的,通过结合实物模型的操作,可以实现更加准确的操作训练目的。中央控制器4的信号获取传输信号的方式采用常规的实现方式即可实现,在此不做赘述。
41.中央控制器4与所述vr可穿戴设备2、位置监测器1以及动作捕捉装置3通讯连接,例如为有线和/或无线连接,用以接收所述手部动作信号和定位信号,根据所述手部动作信号和定位信号生成控制信号,并将所述控制信号发送至所述vr可穿戴设备2。中央控制器4通过将控制信号发送至可穿戴设备2,并与可穿戴设备中显示的外浮顶油罐模型5影像结合,实现外浮顶油罐模型5的事故处置培训,例如模拟打开应急雨水溢流管,防止雨水灌满外浮顶油罐,模拟打开边缘通气阀防止外浮顶油罐爆炸等。
42.最后应说明的是:本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统或装置而言,由于其与实施例公开的方法相对应,所以描述比较简单,相
关之处参见方法部分说明即可。
43.以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1