一种机器人分拣教学实训平台的制作方法
本技术涉及机器人分拣教学,特别涉及一种机器人分拣教学实训平台。
背景技术:
1、分拣机器人是一种具备了传感器、物镜和电子光学系统的机器人,可以快速进行货物分拣,随着社会的高速发展,分拣机器人已经进入工业生产中的每个程序当中,机器人分拣教学实训平台是一种为了培养机器人应用领域专门的技术技能人才,适应现代化建设和未来社会与科技发展需要的教学培训设备,其主要通过模拟分拣过程,帮助培训人员学习编写机器人自动分拣程序;
2、传统的机器人分拣教学实训平台在使用时,通常是利用真实工业机器人进行教学培训,导致教学设备成本过高,且工业机器人设备需要定期进行维护和保养,进一步增加了教学成本,不利于对培训人员进行机器人基础教学,为此,提出一种机器人分拣教学实训平台。
技术实现思路
1、有鉴于此,本实用新型希望提供一种机器人分拣教学实训平台,以解决或缓解现有技术中存在的技术问题,至少提供有益的选择。
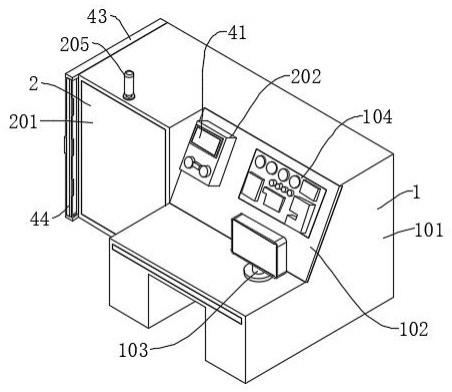
2、本实用新型实施例的技术方案是这样实现的:一种机器人分拣教学实训平台,包括教学平台组件和计算模拟机构,所述教学平台组件包括实训台、置物板、计算机和仪表盘模拟器;
3、所述计算模拟机构包括高清显示屏、分拣机器人控制箱、机器人控制器、识别控制器和警示灯;
4、所述置物板安装于所述实训台的前表面,所述计算机安装于所述实训台的上表面,所述仪表盘模拟器安装于所述置物板的前表面一侧,所述高清显示屏安装于所述实训台远离置物板的一侧,所述分拣机器人控制箱安装于所述置物板前表面远离仪表盘模拟器的一侧,所述机器人控制器安装于所述分拣机器人控制箱的内侧壁顶部,所述识别控制器安装于所述分拣机器人控制箱的内侧壁中部,所述警示灯安装于所述实训台上表面靠近高清显示屏的一侧。
5、进一步优选的,所述实训台远离置物板的一侧固定连接有壳体,所述壳体的内侧壁滑动连接有门体。
6、进一步优选的,所述门体的一侧固定连接有定位块,所述定位块的外侧壁滑动连接于壳体的内侧壁。
7、进一步优选的,所述壳体的内侧壁顶部和底部均开设有导向槽,所述导向槽的内侧壁滑动连接有轴块,所述轴块远离导向槽的一端与所述门体固定连接。
8、进一步优选的,所述门体的外壁远离定位块的一侧固定连接有橡胶垫,所述门体的内侧壁靠近定位块的一侧均匀固定连接有磁条。
9、进一步优选的,所述分拣机器人控制箱的前表面安装有触控屏,所述分拣机器人控制箱的内侧壁底部均匀安装有继电器。
10、进一步优选的,所述触控屏的信号输出端通过导线电性连接于机器人控制器的信号输入端,所述计算机的信号输出端通过导线电性连接于机器人控制器、高清显示屏和仪表盘模拟器的信号输入端。
11、进一步优选的,所述机器人控制器的信号输出端通过导线电性连接于识别控制器的信号输入端,所述识别控制器的信号输出端通过导线电性连接于计算机的信号输入端,所述识别控制器的电性输出端通过导线电性连接于继电器的电性输入端,所述继电器的电性输出端通过导线电性连接于警示灯的电性输入端。
12、本实用新型实施例由于采用以上技术方案,其具有以下优点:本实用新型通过利用计算机对机器人自动分拣程序进行学习和编写,然后通过机器人控制器对编写的机器人自动分拣程序进行运行,并生成工业机器人对应的控制指令,然后通过识别控制器对控制指令进行识别和判断,当程序判定成功后,利用高清显示屏将程序对应的工业机器人动作以视频的方式展示出来,从而无需使用真实工业机器人进行教学培训,降低了设备和教学成本,使机器人分拣教学实训平台更利于对培训人员进行机器人基础教学。
13、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本实用新型进一步的方面、实施方式和特征将会是容易明白的。
技术特征:
1.一种机器人分拣教学实训平台,包括教学平台组件(1)和计算模拟机构(2),其特征在于:所述教学平台组件(1)包括实训台(101)、置物板(102)、计算机(103)和仪表盘模拟器(104);
2.根据权利要求1所述的机器人分拣教学实训平台,其特征在于:所述实训台(101)远离置物板(102)的一侧固定连接有壳体(43),所述壳体(43)的内侧壁滑动连接有门体(44)。
3.根据权利要求2所述的机器人分拣教学实训平台,其特征在于:所述门体(44)的一侧固定连接有定位块(49),所述定位块(49)的外侧壁滑动连接于壳体(43)的内侧壁。
4.根据权利要求3所述的机器人分拣教学实训平台,其特征在于:所述壳体(43)的内侧壁顶部和底部均开设有导向槽(46),所述导向槽(46)的内侧壁滑动连接有轴块(45),所述轴块(45)远离导向槽(46)的一端与所述门体(44)固定连接。
5.根据权利要求4所述的机器人分拣教学实训平台,其特征在于:所述门体(44)的外壁远离定位块(49)的一侧固定连接有橡胶垫(47),所述门体(44)的内侧壁靠近定位块(49)的一侧均匀固定连接有磁条(48)。
6.根据权利要求1所述的机器人分拣教学实训平台,其特征在于:所述分拣机器人控制箱(202)的前表面安装有触控屏(41),所述分拣机器人控制箱(202)的内侧壁底部均匀安装有继电器(42)。
7.根据权利要求6所述的机器人分拣教学实训平台,其特征在于:所述触控屏(41)的信号输出端通过导线电性连接于机器人控制器(203)的信号输入端,所述计算机(103)的信号输出端通过导线电性连接于机器人控制器(203)、高清显示屏(201)和仪表盘模拟器(104)的信号输入端。
8.根据权利要求7所述的机器人分拣教学实训平台,其特征在于:所述机器人控制器(203)的信号输出端通过导线电性连接于识别控制器(204)的信号输入端,所述识别控制器(204)的信号输出端通过导线电性连接于计算机(103)的信号输入端,所述识别控制器(204)的电性输出端通过导线电性连接于继电器(42)的电性输入端,所述继电器(42)的电性输出端通过导线电性连接于警示灯(205)的电性输入端。
技术总结
本技术提供了一种机器人分拣教学实训平台,包括教学平台组件和计算模拟机构,所述教学平台组件包括实训台、置物板、计算机和仪表盘模拟器;所述计算模拟机构包括高清显示屏、分拣机器人控制箱、机器人控制器;本技术通过利用计算机对机器人自动分拣程序进行学习和编写,然后通过机器人控制器对编写的机器人自动分拣程序进行运行,并生成工业机器人对应的控制指令,然后通过识别控制器对控制指令进行识别和判断,当程序判定成功后,利用高清显示屏将程序对应的工业机器人动作以视频的方式展示出来,从而无需使用真实工业机器人进行教学培训,降低了设备和教学成本,使机器人分拣教学实训平台更利于对培训人员进行机器人基础教学。
技术研发人员:何学财
受保护的技术使用者:苏州森伯特智能科技有限公司
技术研发日:20221014
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!