一种全自动PCB绑定机的制作方法
一种全自动pcb绑定机
技术领域
1.本实用新型属于液晶模组加工设备技术领域,具体涉及一种全自动 pcb绑定机。
背景技术:
2.液晶显示面板由于具有体积小、无辐射、省电等优点,使其不仅在民用电子设备如手机、电视机、电脑等方面得到广泛的应用,同时在军事、遥控等方面也得到了广泛的应用。随着电子技术的飞速发展,对液晶显示面板的要求也越来越高,比如大尺寸、高分辨率等。cof(chip on flex,or,chip on film,覆晶薄膜)绑定(bonding)技术是实现这一目标的重要手段。
3.cof绑定是指使用一条两端分别具有绑定区的覆晶薄膜,通过热压合等方法将该覆晶薄膜一端的绑定区与显示面板的绑定区绑定,另一端的绑定区与驱动印刷电路板(pcb)的绑定区绑定,从而实现驱动pcb与显示器面板的电连接,其中pcb绑定机是实现cof与pcb板热压绑定的重要仪器设备。
4.然而,现有的pcb绑定设备一般都是半自动设备,需要采用人工操作进行上下料和调节对位,生产效率低下,且对位精度不够,导致产品合格率不高,尤其对于大尺寸的面板,产品合格率更低。此外,现有的pcb绑定设备只有一个pcb板供给机构,不能同时实现多个pcb板热压绑定。
技术实现要素:
5.为了解决现有技术中存在的上述问题,本实用新型提供了一种全自动 pcb绑定机。本实用新型要解决的技术问题通过以下技术方案实现:
6.一种全自动pcb绑定机,包括:机架,设置在所述机架后方的两套pcb 板供给机构,设置在所述机架内部的pcb对位补正机构,分别设置在所述 pcb板供给机构左/右侧的两套acf贴附机构,设置在所述机架内部的pcb 本压机构、四轴运动真空平台、xz轴搬运真空arm、电控系统以及操作面板,其中,
7.所述pcb板供给机构对称设置在所述机架后方的两侧,所述pcb对位补正机构设置在所述机架内的后侧中间,所述pcb本压机构设置在所述 pcb对位补正机构的前方,所述四轴运动真空平台设置在所述pcb本压机构的前方,所述xz轴搬运真空arm设置在所述机架的右侧,所述电控系统设置于所述机架的左前方,所述操作面板设置于所述机架的右前方和所述pcb板供给机构的后方;
8.所述pcb板供给机构、所述pcb对位补正机构、所述acf贴附机构、所述pcb本压机构、所述四轴运动真空平台以及所述xz轴搬运真空arm 均与所述电控系统电连接,所述电控系统连接所述操作面板。
9.在本实用新型的一个实施例中,所述acf贴附机构包括acf贴附主体、设置于所述acf贴附主体左上方的料带张紧轮、设置于所述料带张紧轮右侧及下方的acf保护料带导向轮、设置于所述料带张紧轮右下方的acf料卷安装机构、设置于所述acf料卷安装机构右侧
的acf保护料带回收装置、设置于所述acf料卷安装机构下方的acf料卷进给回收机构和acf上压头、设置于所述acf上压头下方的acf下压头、设置于所述acf下压头左侧的acf 切刀机构以及设置于所述acf下压头上方的acf剥离机构。
10.在本实用新型的一个实施例中,所述pcb本压机构包括本压下刀和12 个本压上刀头。
11.在本实用新型的一个实施例中,所述pcb本压机构还包括压接后的 pcb板支撑机构,所述压接后的pcb板支撑机构位于所述本压下刀的后下方。
12.在本实用新型的一个实施例中,所述四轴运动真空平台包括x向运动机构、y向运动机构、z向运动机构、可旋转θ轴、真空吸附平台以及拓展真空支撑平台,其中,所述真空吸附平台分别与所述x向运动机构、所述 y向运动机构、所述z向运动机构以及所述可旋转θ轴连接,所述拓展真空支撑平台位于所述真空吸附平台上方。
13.本实用新型的有益效果:
14.1、本实用新型提供的全自动pcb绑定机可以实现自动搬运、自动对位、自动压合绑定等一系列自动化作业,节省了人工成本,提高了生产效率和产品合格率;
15.2、本实用新型提供的全自动pcb绑定机通过伺服电机与气缸相结合的热压方式控制本压压头的压合,在精确控制压合深度的同时实现了本压压头的恒力输出,提高了压合产品的一致性,进一步提高了产品质量;
16.3、本实用新型提供的全自动pcb绑定机可实现一边四块pcb板的热压绑定,提升了生产效率,同时也保证了pcb与cof的精密压接。
17.以下将结合附图及实施例对本实用新型做进一步详细说明。
附图说明
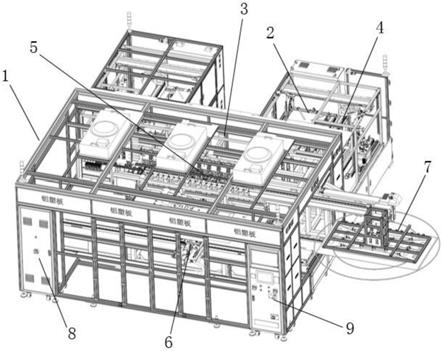
18.图1是本实用新型实施例提供的一种全自动pcb绑定机的结构示意图;
19.图2是本实用新型实施例提供的acf贴附机构的结构示意图;
20.图3是本实用新型实施例提供的pcb本压机构的结构示意图;
21.图4是本实用新型实施例提供的四轴运动真空平台的结构示意图;
22.图5是本实用新型实施例提供的全自动pcb绑定机的外观立体图;
23.图6是本实用新型实施例提供的全自动pcb绑定机的功能连接示意图;
24.附图标记说明:
[0025]1‑
机架,2
‑
pcb板供给机构,3
‑
pcb对位补正机构,4
‑
acf贴附机构,41
‑
acf贴附主体,42
‑
料带张紧轮,43
‑
acf保护料带导向轮,44
‑
acf料卷安装机构,45
‑
acf保护料带回收装置,46
‑
acf料卷进给回收机构, 47a
‑
acf上压头,47b
‑
acf下压头,48
‑
acf切刀机构,49
‑
acf剥离机构, 5
‑
pcb本压机构,51
‑
本压下刀,52
‑
本压上刀头,52a
‑
本压压头,52b
‑
气缸, 52c
‑
伺服控制系统,53
‑
压接后的pcb板支撑机构,6
‑
四轴运动真空平台, 61
‑
x向运动机构,62
‑
y向运动机构,63
‑
z向运动机构,64
‑
可旋转θ轴, 65
‑
真空吸附平台,66
‑
拓展真空支撑平台,7
‑
xz轴搬运真空arm,8
‑
电控系统,9
‑
操作面板。
具体实施方式
[0026]
下面结合具体实施例对本实用新型做进一步详细的描述,但本实用新型的实施方
式不限于此。
[0027]
实施例一
[0028]
请参见图1,图1是本实用新型实施例提供的一种全自动pcb绑定机的结构示意图,包括:
[0029]
机架1,设置在机架1后方的两套pcb板供给机构2,设置在机架1内部的 pcb对位补正机构3,分别设置在pcb板供给机构2左/右侧的两套acf贴附机构4,设置在机架1内部的pcb本压机构5、四轴运动真空平台6、xz轴搬运真空arm7、电控系统8以及操作面板9,其中,
[0030]
pcb板供给机构2对称设置在机架1后方的两侧,pcb对位补正机构3 设置在机架1内的后侧中间,pcb本压机构5设置在pcb对位补正机构3的前方,四轴运动真空平台6设置在pcb本压机构5的前方,xz轴搬运真空arm7 设置在机架1的右侧,电控系统8设置于机架1的左前方,操作面板9设置于机架1的右前方和pcb板供给机构2的后方;
[0031]
pcb板供给机构2、pcb对位补正机构3、acf贴附机构4、pcb本压机构5、四轴运动真空平台6以及xz轴搬运真空arm7均与电控系统8电连接,电控系统8连接操作面板9。
[0032]
其中,机架1为焊接钢结构。
[0033]
可选地,机架1底部还均匀的设置有若干万向轮,以方便设备移动。相应的,每个万向轮旁边还设置有一个支撑脚座以稳定设备。
[0034]
进一步地,两套pcb板供给机构2主要用于提供pcb板。相应地,在每个pcb板供给机构2旁边各设有一个acf贴附机构4,用于进行acf 贴付。
[0035]
此外,本实施例的缓冲材一方面可以起到隔热作用,从而保护pcb在热压过程中不被压化;另一方面还可以起到缓冲作用,保护pcb在热压过程中不被压破。
[0036]
进一步地,请参见图2,图2是本实用新型实施例提供的acf贴附机构的结构示意图,其包括:acf贴附主体41、设置于acf贴附主体41左上方的料带张紧轮42、设置于料带张紧轮42右侧及下方的acf保护料带导向轮43、设置于料带张紧轮42右下方的acf料卷安装机构44、设置于acf料卷安装机构44右侧的acf保护料带回收装置45、设置于acf料卷安装机构44下方的 acf料卷进给回收机构46和acf上压头47a、设置于acf上压头47a下方的 acf下压头47b、设置于acf下压头47b左侧的acf切刀机构48以及设置于acf下压头47b上方的acf剥离机构49。
[0037]
具体地,acf贴附长度可通过系统提前设定,acf切刀机构48会自动计算切刀位置并做相应调节;通过acf贴附长度设定,acf料卷进给回收机构 46会在伺服电机的控制下自动带动acf料带走一个设定值,料带张紧轮42 用于张紧料带,以提高贴附精度。acf料带供给长度可由伺服电机控制,以达到精确供给,精确贴附。
[0038]
由于本实施例采用了两套pcb板供给机构2和对应的两套acf贴附机构4,相比传统的pcb绑定设备,可同时实现多个pcb板贴附和热压绑定,提高了生产效率。
[0039]
进一步地,请参见图3,图3是本实用新型实施例提供的pcb本压机构的结构示意图,本实施例提供的pcb本压机构5包括本压下刀51和12 个本压上刀头52。
[0040]
在实际使用过程中,可同时启用本压下刀51和本压上刀头52,实现一次同时完成12个pcb边的热压绑定,提升了生产效率。
[0041]
此外,还可以根据实际需要启动其中几个本压上刀头52,在满足使用要求的同时,节约了成本。
[0042]
进一步地,请继续参见图3,其中,本压上刀头52还包括本压压头52a、气缸52b以及伺服控制系统52c,本压压头52a通过气缸52b与伺服控制系统52c连接,伺服控制系统52c电连接电控系统8。
[0043]
具体地,伺服控制系统52c在电控系统8的控制下,通过气缸52b直接带动本压压头52a完成压合动作。其中,气缸52b控制压合力度以实现压头的恒力输出,保证了压合产品的一致性。
[0044]
进一步地,pcb本压机构5还包括压接后的pcb板支撑机构53,压接后的pcb板支撑机构53位于本压下刀51的后下方。
[0045]
本实施例在pcb本压机构5上设置一个压接后的pcb板支撑机构53,可以用于放置压接完成的pcb板,从而对pcb板起到保护作用。
[0046]
进一步地,请参见图4,图4是本实用新型实施例提供的四轴运动真空平台的结构示意图,其包括:x向运动机构61、y向运动机构62、z向运动机构63、可旋转θ轴64、真空吸附平台65以及拓展真空支撑平台66,其中,真空吸附平台65分别与x向运动机构61、y向运动机构62、z向运动机构63以及可旋转θ轴64连接,拓展真空支撑平台66位于真空吸附平台65上方。
[0047]
本实施例提供的四轴运动真空平台6是一套包括真空吸附系统且具备 x、y、z以及θ轴四轴精确控制走位的装置,可以实现前后、左右、上下以及不同角度多方位全面运动,能够满足产品abcd四个边的加工转动需求,实现产品精确对位补正需求。
[0048]
此外,四轴运动真空平台6还设置了一个拓展真空支撑平台66,用于承载压接后的pcb板。
[0049]
xz轴搬运真空arm7主要用于将压合好的产品通过真空吸附到机械手上,并搬运至下一个设备以进行下一个生产环节。
[0050]
电控系统8主要用于控制整个设备的运行,操作面板9主要用于开关设备以及对各个机构的参数进行设定,同时也可进行紧急制动。
[0051]
在本实施例中,不仅在机架1前方设置了操作面板9,在后侧的pcb 板供给机构2上也设置了操作面板(图中未示出),这样更方便生产人员操作。
[0052]
本实用新型提供的全自动pcb绑定机可通过操作面板9事先设定各个机构的参数,从实现自动搬运、自动对位、自动压合绑定等一系列自动化工作,节省了人工成本,提高了生产效率和产品合格率。
[0053]
进一步地,本实施例提供的全自动pcb绑定机还包括设置于机架1上方的灰尘过滤器以及信号灯,灰尘过滤器主要用于降低设备灰尘度的,提升产品品质,信号灯主要用于指示仪器状态,在当设备在运行过程中发生故障时,给出警示,工作人员可以在第一时间对故障进行处理,避免造成更多地产品报废。
[0054]
此外,本实施例提供的全自动pcb绑定机还包括外罩,以将设备的各个机构保护于机架之内,使其免受飞尘等污染。具体地,外罩可以包括铝型材外框架、铝塑板和亚克力。透明亚克力材料可以方便操作人员观察设备内部情况。请参见图5,图5是本实用新型实施例提供的全自动pcb绑定机的外观立体图。
[0055]
请参见图6,图6是本实用新型实施例提供的全自动pcb绑定机的功能连接示意图,具体地,其工作原理为:
[0056]
首先,通过操作面板9初始化设备,以对各个机构的参数进行预设置。
[0057]
然后,启动设备,开始工作,具体地:
[0058]
pcb板供给机构2向设备提供pcb板,然后pcb板被转移到pcb对位补正机构3进行对位补正,pcb对位补正机构3通过抓取pcb两边“mark”做为补正动作,然后将补正后的pcb板传送至acf贴附机构4;acf贴附机构4对pcb板进行设定位置的acf贴附并进行贴付检测,接着再将acf 贴附合格的pcb板再次送到pcb对位补正机构3进行对位补正,然后传送至pcb本压机构5。同时,四轴运动真空平台6将压有cof的玻璃通过真空吸附也传送至pcb本压机构5。pcb板与玻璃板上的cof在高温热压刀头下面进行ccd对位,然后进行高温热压绑定,实现acf导电粒子爆破,使得pcb板与玻璃板的永久性粘附。绑定完成后的pcb板可置于拓展真空支撑平台66上。
[0059]
pcb绑定完成后,xz轴搬运真空arm 7对完成后的产品进行搬运,并转移至下一设备。
[0060]
本实用新型提供的全自动pcb绑定机可实现一边四块pcb板的热压绑定,即如果一块液晶面板s边/g边有四块pcb板,则可以同时热压前两套pcb 板后,再平移一个距离热压后两块pcb板;相应地,如果另外一边也是同样四块pcb板,那么四轴运动真空平台旋转180
°
后再进行以上动作,提升了生产效率和兼容性。
[0061]
在本实用新型的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0062]
在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
[0063]
以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1